
Fターム[5J070BA01]の内容
レーダ方式及びその細部 (42,132) | 相対運動に基づく測定 (704) | ドプラ周波数の測定 (647)
Fターム[5J070BA01]に分類される特許
121 - 140 / 647
レーダ装置
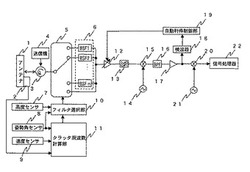
【課題】 従来のレーダ装置は、目標とクラッタをドップラ周波数で分離し、狭帯域フィルタを通過した目標の電力で利得制御を行っていたため、電力が大きいクラッタを受信した時に、受信系が飽和するという問題があった。
【解決手段】 受信系の初段に阻止帯域の異なる複数のノッチフィルタを備え、外部に備えた速度センサ及び姿勢角センサからの情報をもとにクラッタ周波数を計算し、適合する阻止帯域のノッチフィルタを選択する。選択したノッチフィルタは、受信した目標信号のみ通過させ、クラッタを減衰させる。これにより、クラッタにより受信系が飽和する問題を解消する。なお、受信系の初段にフィルタを配置すると、NFが劣化し、低S/Nの目標の検出が困難になる問題があるため、高度が低くクラッタ電力が大きい時のみ、ノッチフィルタを通過させるよう、切換えを行う。
(もっと読む)
人感センサおよび空調装置

【課題】 演算コストの低い人感センサおよびこれを用いた空調装置を提供する。
【解決手段】ドップラーセンサと、信号強度を記憶する記憶部と、信号強度の少なくとも一部が第1の閾値より大きいかどうかを比較する信号強度比較部と、記憶部の少なくとも一部の分散値が第2の閾値より大きいかどうかを比較する分散値比較部と、比較結果とに基づいて設置された空間の人間の状態を推定する推定部と、を有する。
(もっと読む)
気象レーダ信号処理装置及びそのグランドクラッタ除去方法
【課題】MTI処理後のグランドクラッタの消え残りと気象エコーとを高精度に区別する。
【解決手段】MTI処理A1により、目標反射波受信信号のIQデータからグランドクラッタ成分を除去することで気象エコー成分を抽出する。続いて、スペクトル評価処理A2により、気象エコー成分から順次正規化したパルスペア合成ベクトルを求め、そのパルスペア合成ベクトルの総和の絶対値からスペクトルの平坦さを評価する評価指標を算出し、この評価指標に基づいてグランドクラッタの除去と気象エコーの保持を行う。最終的に、ノイズ除去処理A3により、処理A2の評価指標に対する振幅成分の電力値に対する閾値処理を行って孤立点を除去することでノイズを除去する。このようにしてスペクトルの平坦さを評価し、この評価指標に対する閾値処理によりグランドクラッタ除去を行う。
(もっと読む)
気象レーダ装置及び気象観測方法
【課題】突発的かつ局地的な気象現象を高精度に観測できるようにする。
【解決手段】気象レーダ装置は、複数のアンテナ素子から電波を送信し、位相制御により仰角方向にビーム走査を行って気象目標からの反射波を受信するアンテナユニット11と、前記アンテナユニット11の開口面の仰角と方位角とを駆動する駆動ユニット12と、複数の観測モードにしたがって前記アンテナユニット11及び前記駆動ユニット12により観測範囲と観測仰角とを調整する空中線調整装置5と、前記反射波の受信信号に基づいて前記観測モードを設定する監視制御装置4とを具備する。
(もっと読む)
走行車両台数計測装置及びプログラム
【課題】 1車線の道路上を走行した車両台数を正しく計測することが可能なドップラー方式の検出センサを用いた走行車両台数計測装置の提供。
【解決手段】 1車線上における任意の計測範囲内を走行中の車両に対し放射した送信波と、車両からの反射波との差分波を周波数分析することによって抽出される車両の速度と振幅値とを取得してそれらの時間変位を記録する。記録した車両速度と振幅値とに基づいて、前記計測範囲に車両が進入してから通過し終わるまでにかかる経過時間を確定し、当該確定した経過時間毎に車両台数をカウントする。すなわち、単に車両速度のみを用いて通過車両の台数をカウントするのではなく、車両速度に振幅値を組み合わせて用いて通過車両の台数をカウントする。これにより、計測範囲内における車両の移動態様を的確に把握して通過車両の台数をカウントすることが、ドップラー方式の検出センサを用いるだけでできるようになる。
(もっと読む)
レーダ装置、レーダ信号処理方法及びレーダ信号処理プログラム
【課題】パルスレーダで目標の速度を正確に検出しようとする場合、複数のPRFのパルス信号から位相回転量を算出し、PRFごとの位相回転量の組み合わせから速度検出を行う。このような関連技術のレーダでは、PRFごとにドップラ周波数分解能が異なるため、何度も折り返るような高速目標の場合は速度検出精度の差に依存する誤差が無視できなくなり、速度の検出を誤ってしまうという課題がある。
【解決手段】本発明は、前記課題を解決するために、利用する複数のPRF間で等間隔なドップラ周波数分解能を得ることのできるようPRFを制御するPRF制御器11と、PRFを等間隔なドップラ周波数分解能ごとの受信信号に分離する等間隔ドップラ周波数分離器16とを備えることにより、誤差のない速度検出を行うことを可能とする。
(もっと読む)
ドップラセンサ装置
【課題】 定常時ノイズ幅が所定の報知閾値に達していることを報知するドップラセンサ装置を提供する。
【解決手段】 送受信回路2は、送信信号を電波として所定の検出範囲に対して送信するとともに、検出範囲で反射された電波を受信して得られた受信信号に送信信号を混合した混合信号を出力する。フィルタ部31は、混合信号から所定の周波数帯のドップラ信号を抽出して出力する。判定部32は、上記のドップラ信号に基いて検出範囲における移動物体の有無を判定する。定常検出部33は、上記のドップラ信号の信号レベルの振動の幅の定常値である定常時ノイズ幅を検出する。報知部34は、上記の定常時ノイズ幅を所定の報知閾値と比較し、定常時ノイズ幅が報知閾値以上である場合に報知を行う。使用者は、報知部34の報知の有無により、定常時ノイズ幅が報知閾値に達しているか否かを知ることができる。
(もっと読む)
目標検出装置及び目標検出方法
【課題】目標検出の誤警報の低減を図り得るレーダ装置の目標検出装置を提供する。
【解決手段】目標検出部において、事前に受信ビデオ信号からクラッタの分布を形状パラメータ及びスレッショルド算出処理部162にて推定し、さらに擬似的な目標を示すテストセルを含めた形状ペラメータに対応するスレッショルドをレーダの1スキャンごとにスレッショルドメモリ163に記憶しておき、検出判定部165により、このスレッショルドメモリ163に記憶されたスレッショルドを利用して、ワイブルCFAR処理部164による処理から目標を検出するようにしている。
(もっと読む)
監視センサ及びプログラム
【課題】浴室内に被監視者以外の動きがある場合であっても、浴室内に在室する被監視者の動きの有無を正確に判定することが可能な、監視センサ及びプログラムを提供する。
【解決手段】監視センサ1は、浴室70内における動きを検出し、その検出の結果を信号S1として出力するドップラセンサ10と、信号S1の値と浴室70が有する浴槽71の湯面の揺れに起因する外乱要因を除去するための閾値とを比較する比較部30と、信号S1に対して所定のフィルタ処理を施すことにより、信号S2を出力するLPF20と、信号S2の値と浴室70内のシャワー72からの放水に起因する外乱要因を除去するための閾値とを比較する比較部31と、比較部30及び比較部31による比較の結果に基づいて、浴室70内に在室している被監視者の動きの有無を判定する判定部50と、を備える。
(もっと読む)
トイレ装置
【課題】ドップラーセンサーを用いて対象物の検知を行う際に、より簡素な構成で且つ確実に誤検知を防止できるトイレ装置を提供すること。
【解決手段】このトイレ装置としての小便器洗浄装置は、受信部12が送信期間以外においても受信動作を行ってドップラー信号を対象物検知部24に出力する干渉検知処理と、その出力されたドップラー信号が、他のトイレ装置から送信された電波による影響を受けた信号であると判断した場合には、その影響を受けた信号と干渉しないタイミングとなるように、電波送信タイミングを調整する調整信号をドップラーセンサー部DSに出力する干渉調整処理と、その調整信号で調整された電波送信タイミングに送信期間をシフトさせるシフト処理と、を実行し、検知動作は、このシフトされた送信期間を基準とし動作間隔期間をおいて継続的に複数回実行される。
(もっと読む)
パルスレーダ装置、パルスレーダ装置の目標物検出方法及び検出処理プログラム
【課題】1方向のビーム走査に要する時間を短くすると共に、2次トリップエコーとの判別を誤ることなく確実に1次エコーを検出することができるパルスレーダ装置を提供する。
【解決手段】パルス位相設定器11によって基準変化量φ1でNパルス分の初期位相を発生させ、送信パルス発生器12によってN個の送信パルス列を発生・送信する。目標で反射したNパルス分の受信信号を1組として目標信号を検出する。同様にして基準変化量φ2ついても目標信号を検出する。初期位相と逆の位相で受信信号を補正し、補正後の受信信号の位相回転量を比較して2次トリップエコーを除去すると共に1次エコーを検出しその目標データを出力する。
(もっと読む)
レーダ装置およびセンサインタフェース装置
【課題】本発明は、速度センサまたは加速度センサと共に同じ移動体に搭載されたレーダ装置と、これらのセンサの何れかとレーダ装置とのインタフェースをとるセンサインタフェース装置に関し、構成が大幅に複雑化することなく、目標との相対距離が広範かつ急激に増減する状態であっても性能を高く安定に維持できることを目的とする。
【解決手段】波動信号に応じて目標から到来した到来波に基づいて前記目標の速度、距離、位置、性質の何れかの識別を行うレーダ装置であって、前記レーダ装置と共に同じ移動体に搭載された速度センサまたは加速度センサを用いて前記波動信号が送信される方向における前記移動体または前記レーダ装置の速度を特定し、前記速度に応じて前記波動信号に生じるドップラシフトを特定するドップラシフト特定手段を備え、前記レーダ装置は、前記波動信号の周波数を前記ドップラシフトに亘って補正する補正手段を有する。
(もっと読む)
パルスレーダ装置
【課題】MTIフィルタの伝達関数に新たな項を付加して通過帯域幅を広げることにより、MTIに近いクラッタ抑圧性能を保持しつつ、フィルタの振幅特性による目標信号の減衰を軽減することのできるパルスレーダ装置を得る。
【解決手段】パルス電波を送受信して受信信号xを生成する送受信処理回路100と、フィルタ通過域幅を可変設定して受信信号を通過させる通過域幅制御型クラッタ抑圧手段と、通過域幅制御型クラッタ抑圧手段の出力信号に対して目標検出処理を行い、検出結果を通過域幅制御型クラッタ抑圧手段にフィードバック入力する目標検出手段と、を備えている。
(もっと読む)
反射型侵入監視装置
【課題】電子機器から発生するスイッチングノイズ等の影響を受けることなく、侵入者を確実に検知することができる反射型侵入監視装置を提供する。
【解決手段】送信部10は送信アンテナ21からマイクロ波を検知エリア20へ送信する。受信部30は検知エリア20に侵入した対象物22からの反射波を受信アンテナ23で受信し、周波数変換回路40にて受信信号frをローカル信号flo、ftと混合して中間周波数fifに変換する。周波数検波回路50は、中間周波数fifを中間周波信号IF2に変換して周波数検波する。AFC電圧生成回路54は、反転直流増幅器61で増幅された検波電圧bと予め設定したしきい値と比較し、検波電圧bがしきい値を超えない範囲では周波数検波部51内の周波数変換部の周波数制御を行い、検波電圧bがしきい値を超えると上記周波数変換部の周波数制御を停止する。
(もっと読む)
レーダ装置、物体検知システム、および、物体検知方法
【課題】レーダ装置で異なる物体情報を一つの物体と誤判定することを防止する技術を提供する。
【解決手段】第1の走査の代表検知点が第2の走査において存在しない場合、第1の走査において検知された代表検知点の次に車両に近い検知点を第2の走査における代表検知点に設定する。この第2の代表検知点が、第1の走査の代表検知点の位置から遠方側に所定距離以上に離れた位置に存在する場合は、第1の代表検知点と第2の代表検知点とを異なる物体の情報と判定する。これにより、異なる物体を一つの物体と誤判定することに起因する物体の移動方向の誤った判定を防止できる。
(もっと読む)
レーダ信号処理装置
【課題】レーダ信号処理装置がクラッタを抑圧し目標検出するときに、誤警報率を低く一定に抑えつつ、信号処理負荷を低減し規模を抑制する。
【解決手段】受信信号は、コヒーレント積分を行なうCINT処理系31と、MTI(移動目標指示)処理を行なうMTI処理系32に分配される。受信ビデオ選択部17にて、例えば操作員が目標、クラッタ、信号処理負荷などの状況を考慮していずれかの処理系信号を選択する。CFAR処理を用いずに作成したクラッタマップデータ10を参照して目標検出するときに、対象がクラッタ領域のときはCFAR処理に、クラッタフリー領域のときは固定スレッショルド検定に切替える処理切替部11、12を備える。この結果、処理負荷が高く規模の増大に繋がるCFAR処理を、クラッタ領域のときに限定して実施することにより、信号処理負荷を低減し、誤警報率を低く抑えつつ装置規模を抑制できる。
(もっと読む)
レーダ装置
【課題】
気象レーダ装置等、広いダイナミックレンジを有するレーダ受信機出力信号を量子化したディジタル信号を汎用の通信路を以って配信する場面において,通信路には広帯域な伝送が要求される。このことは、レーダ装置の最大探知距離等のトレードオフとして現出する。
【解決手段】
本発明は、レーダ方程式における電波伝搬による電磁波電力の距離減衰則に基づき、前記広ダイナミックレンジな受信機出力を量子化した信号の特徴を維持して、ダイナミックレンジを圧縮,信号伝送に必要な帯域を節約する.
(もっと読む)
パルスドップラレーダ装置
【課題】 クラッタと目標の周波数が重なる場合であっても、高PRFの送信パルスによる目標探知を可能とするパルスドップラレーダ装置を得ることを目的とする。
【解決手段】 第1フェーズにて第1の直線周波数変調による第1の周波数変調を行った後、第2フェーズにて第1の直線周波数変調よりも時間変化率の大きい第2の直線周波数変調による第2の周波数変調を行うことで、距離遅延に基く周波数遷移から目標の第1、第2の周波数を観測し、観測された目標の第1、第2の周波数に基いて、当該目標の距離を測定する距離測定部を備える。
(もっと読む)
目標物探知装置および目標物探知方法
【課題】目標物が停止したのか失探したのかを判別して、追尾の誤りを削減することを目的とする。
【解決手段】ドップラ効果を利用して目標物が探知するレーダ装置の監視領域を分割した複数の分割範囲ごとに、電波到達可能であるか否かを示す電波到達可否情報と、ドップラ効果が有るか無いかを示すドップラ情報を関連付けて記録し、最後に探知された目標物の追尾結果を示す追尾情報と今回探知した目標物の探知結果を示す探知情報を用いて、最後に探知した目標物と今回探知した目標物とを関連付け、追尾処理が中止された対象の最後に探知された目標物の追尾情報に含まれる位置情報を参照して、最後に探知された目標物が含まれる分割範囲を検知し、該分割範囲において電波到達可能か否かとドップラ効果の有無を判定して、最後に探知された目標物が停止したかを判定する目標物探知装置および目標物探知方法である。
(もっと読む)
時空間適応処理システムにおいてターゲットを検出するための方法
【課題】方法が、時空間適応処理システムにおいてクラッターを抑圧する。
【解決手段】本方法は、2つのステップを介して低複雑度の計算を達成する。最初に、本方法は、改善された高速近似べき乗法を利用して、データをはるかに小さな部分空間に圧縮する。計算複雑度をさらに低減するために、プログレッシブ特異値分解(SVD)手法を用いて圧縮データの共分散行列の逆行列を更新する。結果として、提案される低複雑度のSTAP手順は、従来のSTAP手順と比較して、計算複雑度のオーダーが低減された最適に近い性能を達成することができる。
(もっと読む)
121 - 140 / 647
[ Back to top ]