
Fターム[5J070BB01]の内容
レーダ方式及びその細部 (42,132) | 追跡(追尾) (806) | 追跡一般 (468)
Fターム[5J070BB01]の下位に属するFターム
Fターム[5J070BB01]に分類される特許
41 - 60 / 91
目標追尾装置
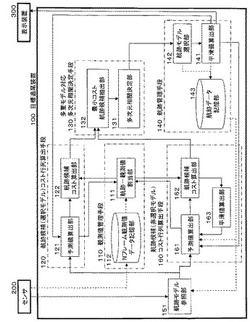
【課題】航跡候補の増大や誤相関を抑制し、正解航跡の選択を可能とする目標追尾装置を得る。
【解決手段】観測値管理手段110、航跡候補(選択モデル)コスト行列算出手段120、多重モデル対応多次元相関決定手段130、航跡管理手段140、航跡選択モデル参照部151、および航跡候補(非選択モデル)コスト行列算出手段160を備えて構成され、各航跡でNフレーム前の平滑値を元に、最新Nフレームでは運動モデル間の遷移はないとして、複数の運動モデルで航跡と観測値の割当を実施する。
(もっと読む)
レーダ装置

【課題】追尾技術によって生成される航跡の推定精度の向上が効率的に実現されるように、追尾開始性能を最適化するためのレーダの最適な観測間隔を決定することのできるレーダ装置を得る。
【解決手段】レーダ10を制御するレーダ制御部9と、未知の目標を検出する追尾開始手段とを備え、レーダ10から追尾開始手段に対して定期的に観測値を提供するレーダ装置において、観測間隔を、追尾開始手段における実際の追尾開始性能が最適となる値に設定するためのシミュレーション処理手段をさらに備えている。シミュレーション処理手段は、解析用観測間隔設定部2と、追尾開始性能計算部3と、シミュレーション用観測間隔候補設定部4と、擬似観測値生成部5と、擬似航跡生成部6と、追尾開始性能集計部7と、シミュレーションに基づく観測間隔をレーダ制御部9に指示するレーダパラメータ指示部8とを含む。
(もっと読む)
目標追尾装置
【課題】目標の統合航跡の誤差の早期収束と、目標の着地予測位置および着地予測範囲を算出する着地予測位置誤差共分散行列の早期収束とを実現した目標追尾装置を得る。
【解決手段】目標Tの2Dセンサ検出結果を出力する検知器10と、目標Tの3Dセンサ検出結果を出力する信号処理器50と、2Dセンサ検出結果から輝度ヒストリを解析する輝度ヒストリ解析処理20と、輝度ヒストリによる推力加速判定処理30と、モデル信頼度制御処理40と、各運動モデルの混合処理、予測処理および平滑処理70〜93と、2Dおよび3Dセンサ検出結果と各運動モデルの予測処理結果とから事後信頼度を算出するモデル信頼度算出処理100と、各運動モデルの統合平滑ベクトルおよび統合平滑誤差共分散行列を算出する統合処理110と、目標Tの着地を予測する着地予測処理120とを備えている。
(もっと読む)
分散アンテナレーダーにより放射される周波数と砲口照準合わせを管理する方法
【課題】実行される砲口照準合わせのスケジューリングを最適な手法で管理することを可能にする方法を提供する。
【解決手段】候補砲口照準合わせはレーダーにより考慮される砲口照準合わせ要求に対応する。各砲口照準合わせは、各組が特に候補砲口照準合わせ毎に定義される認可周波数の組の中から選択される一組の候補周波数である。候補周波数はレーダーにより放射される周波数のダイバーシティを保証する。砲口照準合わせはアンテナの回転速度の変動を動的な手法による。他の方法は表から選択された砲口照準合わせに対して関連する候補周波数の1つを選択する。この選択された(砲口照準合わせと周波数の)対は、対応する波形の放射を担う手段に送信される。具体的には分散スロットアンテナを有する監視レーダーによる砲口照準合わせの管理に適用する。
(もっと読む)
鳥または飛行物体の検知方法
本発明は、少なくとも1つのレーダ(5)の形式の、少なくとも1羽の鳥または別の飛行物体の電波を検出する手段を使用し、各レーダ(5)からのアナログ画像をデジタル画像に変換し、外側安全領域(7)と内側安全領域(8)を前記画像に適用してレーダ(5)毎に安全空間を生成し、次に、安全領域(7、8)内で検出があった場合に措置をとることにより、単一の風力タービン(1)に対する鳥または物体の飛行レベルを検出する方法に関する。 (もっと読む)
アクティブフェーズドアレイレーダ
【課題】空中線モジュールにおける出力の制約を解消してより高い電力の出力を可能にすることで、状況に応じてより有効なアンテナビームを形成できるアクティブフェーズドアレイレーダを提供する。
【解決手段】空中線モジュール20において送信用可変減衰器6aを電力増幅器7の入力側に配置することで出力の制約を解消しより高い電力の出力を可能にし、制御装置8が、各空中線モジュール20の電力増幅器7、可変減衰器6a,6bおよび回路切換え機構2〜4を制御してアンテナ開口面での波源分布特性を、送信時には均一分布特性又は密度テーパ分布特性に切換え、受信時には均一分布特性又は振幅テーパ分布特性に切換える。
(もっと読む)
レーダ装置
【課題】任意の方向にビーム走査を行って目標の追尾を行うレーダ装置において、クラッタマップを用いてクラッタによる誤警報を抑圧する。
【解決手段】クラッタマップ部11は、捜索/追尾区分情報及び送受信方向情報に基づき、捜索時には、受信機の出力信号の距離・方向毎に、時間方向の平均値を算出してクラッタマップを生成し、追尾時には、捜索時に生成したクラッタマップにアンテナのサイドローブ形状に基づいて重み付け合成処理をした信号を検出部に出力する。
(もっと読む)
飛しょう体誘導システム
【課題】 発射後、目標を捜索、捕そくし、目標に向かって誘導する飛しょう体の場合、地上・車両・艦船・航空機等に搭載された誘導管制装置からの目標情報の誤差により、飛しょう体の目標に対する捕そく性能を低下させていた。また、他のシステムのレーダ装置を利用する場合には、他システムセンサの目標に対するバイアス誤差、遅れ時間などにより、更に、目標に対する捕そく性能を低下させていた。
【解決手段】 他システムのレーダ装置を含む各装置の位置誤差、遅れ時間等の推定値に基づき、バイアス誤差を推定することにより、バイアス誤差を除いた目標位置を推定し、シーカの捜索方向を指示することにより、目標に対する捕そく性能を確保するようにした。
(もっと読む)
レーダ情報伝送システム及びそのためのレーダ装置
【課題】複数のレーダ装置の間でのレーダ情報の伝送システムにおいて、情報伝送のための通信装置を設けることなく、レーダ情報を伝送し、レーダ装置間で情報を共有すること。
【解決手段】第1パルスレーダ装置Aからパルス電波に物標情報に基づく通信データを重畳して形成された通信データ重畳電波を送信し、第2パルスレーダ装置Bで通信データ重畳電波に含まれる物標情報を取得することにより、情報伝送のための通信装置を設けることなく、レーダ装置間で情報を共有する。
(もっと読む)
誘導放射線療法システム
【課題】体の中の腫瘍のようなターゲットの位置を正確に確認し、追跡するためのシステム及び方法の提供。
【解決手段】ターゲットの中に又は近くに位置決め可能な信号を生じさせる外部例示ビーコンと、そのビーコンを遠隔操作により励磁させて、認識可能な信号を生じさせる外部励磁源と、互いに既知の幾何学的形体で間隔を隔てられた複数のセンサとを有する。コンピュータが、センサーに接続され、ビーコンの測定値を使用して、ターゲット内部のターゲットアイソセンタを識別するように形成される。コンピュータは、ターゲットアイソセンタの位置とマシンアイソセンタの位置とを比較する。コンピュータはまた、放射線治療前及びその間、ターゲットアイソセンタがマシンアイソセンタと一致するように、患者及び患者の支持装置の移動を制御する。
(もっと読む)
目標追尾装置及び目標追尾方法
【課題】
従来の運動予測方式は、自身が等速直線運動をしている場合は良好な自身と追尾目標の相対針路および相対速度の予測ができ、安定した相対ベクトルの表示ができたが、自身が変針又は変速した場合には応答が非常に遅くなり、自身と追尾目標の相対ベクトルの表示が実際の相対針路や相対速度と大きく異なることがあった。
【解決手段】
対地固定された比較目標を追尾し、メモリに蓄積されたデータより観測時間を変えて追尾情報を演算し、追尾情報から自身の真ベクトルを演算し、自身の真ベクトルの検出装置より得られた自身の真ベクトルと比較し、最適観測時間を演算し、自身と追尾目標の相対ベクトルを演算、表示する。さらに、追尾目標の真ベクトルの変化検出を行い、追尾目標の真ベクトルの変化による自身と追尾目標の相対ベクトルの変化を検出する。
(もっと読む)
物体検出装置
【課題】レーダを用いた物体検出において物体を高精度に検出する物体検出装置を提供することを課題とする。
【解決手段】物体検出装置1であって、物体の位置を検出するレーダ検出手段2と、レーダ検出手段2で今回検出された検出点をグルーピングするグルーピング手段3と、前回の複数のグループに基づいてグルーピング手段3で今回グルーピングされたグループを複数のグループに分割する分割手段3と、各グループの検出点を用いて物体を検出する物体検出手段3とを備えることを特徴とする。
(もっと読む)
物体検出装置
【課題】レーダを用いた物体検出において物体を高精度に検出する物体検出装置を提供することを課題とする。
【解決手段】物体検出装置1であって、物体の位置を検出するレーダ検出手段2と、レーダ検出手段で今回検出された各検出点をグルーピングするグルーピング手段3と、前回のグループに基づいてグルーピング手段3で今回グルーピングされた複数のグループを統合する統合手段3と、各グループの検出点を用いて物体を検出する物体検出手段3とを備えることを特徴とする。
(もっと読む)
物体検出装置
【課題】物体情報を格納する際の優先順位を設定することにより、物体検出処理を適切かつ迅速に行える物体検出装置を提供する。
【解決手段】車両の周囲の物体を検出する物体検出装置1であって、物体の車両に対する相対距離及び相対速度についての物体情報を取得し、取得された複数の物体情報を格納するに際し、車両に対し離反する離反移動物の物体情報に対し離反移動物以外の物体の物体情報を優先的に格納する。これにより、制御システムに必要となる物体情報を優先的に格納することができる。このため、制御システムに必要な物体情報を取りこぼすことを低減でき、物体検出処理を適切かつ迅速に行える。
(もっと読む)
車両のためのモノスタティック・マルチビームレーダセンサ
本発明は、複数の送受信アンテナ(10、10’)を備えた、車両のためのレーダセンサであって、複数の送受信アンテナ(10、10’)は、方位指向性が互いに異なり、送信信号と受信信号を混合する混合器(12、12’)を各々に割り当てられ、混合器の少なくとも一つ(12)が転送混合器であり、混合器の少なくとも他の一つ(12’)が相対的に低い転送電力を有する、レーダセンサにおいて、転送電力が互いに異なる混合器(12、12’)に対する送受信アンテナ(10、10’)の割り当てが非対称的であることを特徴とする、レーダセンサに関する。 (もっと読む)
画像レーダ装置
【課題】雑音等の外乱の影響を抑えて補償量を推定し、高分解能なレーダ画像を生成する画像レーダ装置を得る。
【解決手段】複数のレーダ器3により同一の目標を観測して得られる受信信号を合成してレーダ画像を生成する際に、受信信号に基づいて目標の追尾情報を生成する追尾処理部4と、性能要求、レーダ器緒元および追尾情報に基づいて、各レーダ器3の受信信号が空間周波数領域で部分的に重複するように送受信制御パラメータを決定し、重複する空間周波数領域に関する重複領域情報を生成する観測手順計画部2と、追尾情報に基づいて各レーダ器3の受信信号の粗位相補償を行う粗補償処理部5と、重複領域情報に基づいて所定の評価指標を最小化することにより粗補償処理された受信信号の精位相補償を行う精補償処理部6と、精補償後の受信信号を合成し、高分解能なレーダ画像を生成する合成処理部7とを備える。
(もっと読む)
目標相関統合処理装置
【課題】 指揮統制するシステムにて、目標相関を統合処理する際、その処理対象は各情報源から収集した目標情報に対し、全目標の組合せとなる。従って、目標の増加による組合せ数の増大は複雑な計算を要する目標相関統合処理の処理負荷に影響を与えていた。
【解決手段】 指揮統制システムに接続し、指揮統制対象となる目標の情報源から目標情報を収集し、蓄積する目標情報収集器、目標情報収集器によって蓄積された目標情報より各目標情報を取得し、分布情報を生成する目標分布生成器、目標分布生成器によって生成された分布情報を取得し、その情報から各目標の速度相関判定器の対象目標組となる組合せを決定する目標組合せ抽出器、目標組合せ抽出器によって抽出された目標の組合せに対して、速度相関判定を実施する速度相関判定器により、総合的に相関の有無を判定する目標相関統合判定処理器の対象となる目標組合せを絞り込み、処理負荷を軽減する。
(もっと読む)
3次元高度探知鳥類レーダー用装置および方法
高度探知3次元鳥類レーダーは、アンテナの指向仰角を変更する手段を備える方位角スキャンレーダーを備えている。仰角の変更は、多重ビームを備えたアンテナを用いるか、仰角方向走査手段を用いるか、異なる仰角を指向する2つのレーダーを用いることにより行える。異なる仰角で放射されたビームで探知された鳥などのターゲットからの受信反射波の解析により、ターゲットの高度が特定される。 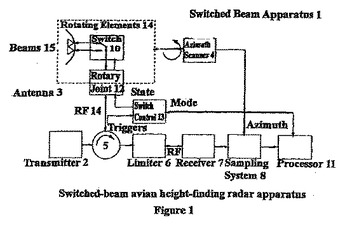 (もっと読む)
(もっと読む)
空港面監視システムおよび空港面監視方法
【課題】空港面に存在する目標の誤検出を減少し、誤ターゲットの表示を抑制できる空港面監視システムを提供する。
【解決手段】ASDE10を用いたASDE追尾系統とMLAT20を用いたMLAT追尾系統を備え、MLAT追尾系統は、MLAT20が出力する目標位置検出情報に基づいて目標近傍の領域に対してはASDE追尾系統のビデオレベル判定部13のスレッショルドレベルを下げ、目標近傍以外の領域に対してはビデオレベル判定部13のスレッショルドレベルを上げるASDEビデオレベル判定用マップ情報205をビデオレベル判定部13に出力するスレッショルドMAP作成処理部23を有している。
(もっと読む)
センサ移動計画システム
【課題】全ターゲットについて総合的に誤差を小さくするのに適した移動方向を算出できるセンサ移動計画システムを得る。
【解決手段】センサ管理部2は、ターゲットからの信号を受信したセンサから受信波形を獲得する受信波形獲得機能25と、受信波形の観測時刻におけるセンサの位置を獲得する位置情報獲得機能24と、2つのセンサの受信波形を照合してセンサペアのターゲットまでの距離差及び相対速度差を求める受信波照合機能26と、前記距離差及び相対速度差を満たす、ターゲットの観測位置及び観測速度を算出する整合算出機能27とを有し、ターゲット管理部1は、ターゲットの観測位置及び観測速度から将来の時刻におけるターゲットの推定位置及び推定速度を算出する推定機能13を有し、センサ行動算出部3は、各センサについて、位置及び速度誤差改善ベクトルを総合した誤差改善ベクトルを算出し、次の時刻におけるセンサの位置を決定する改善方向決定機能31とを有する。
(もっと読む)
41 - 60 / 91
[ Back to top ]