
Fターム[5J070BB01]の内容
レーダ方式及びその細部 (42,132) | 追跡(追尾) (806) | 追跡一般 (468)
Fターム[5J070BB01]の下位に属するFターム
Fターム[5J070BB01]に分類される特許
61 - 80 / 91
誘導装置

【課題】 従来の誘導装置は目標に向けて電波を送信して、目標から直接反射してきた信号を受信することにより目標信号を検出して追尾するが、目標からの反射波が海面または地表面等のクラッタを経由したマルチパス信号を受信した場合は、目標方向と異なる方向に目標がいると認識し、目標ではなくクラッタまたはマルチパスを追尾し、誤ロックすることがあった。
【解決手段】 目標からの直接反射波はHH信号(水平偏波による送受信)とVV信号(垂直偏波による送受信)とで電力差がなく、マルチパス信号はHH信号とVV信号とで電力差が生じる。この電力差に基づき信号処理することにより、目標からの直接反射信号とマルチパス信号とを弁別し、弁別後の目標からの直接反射信号を用いて誘導処理を行う。
(もっと読む)
通信制御方法及びこれを用いたレーダシステム

【課題】 複数のセンサ装置から送信される大量の探知データを効率的に受信する。
【解決手段】 複数のセンサ装置から共通の情報処理装置に対して送信される目標物の探知データの通信量を制御する通信制御方法において、前記共通の情報処理装置は、複数のセンサ装置からそれぞれ送信された探知データを受信する工程と、それらの受信した探知データの通信量から前記複数のレーダ装置と情報処理装置との間の通信負荷を計算し、その通信負荷に応じた通信許可範囲を求める工程と、その求めた通信許可範囲を前記複数のレーダ装置に指示する工程とを備えた。
(もっと読む)
追尾装置
【課題】高い追尾性能を得ることができ、しかも、多目標を追尾する場合であっても処理負荷を低減することができる追尾装置。
【解決手段】座標系を指定する座標系制御部6と、入力された観測値の座標系を、座標系制御部から指定された座標系に座標変換する観測値用座標変換部1aと、座標系制御部から指定された座標系において、観測値用座標変換部で座標変換することにより得られた観測値と追尾している目標の航跡との相関をとる相関処理部2aと、相関処理部で相関がとられた結果に対して、座標系制御部によって指定された座標系において、フィルタリング処理を実施するフィルタリング処理部4aとを備え、座標系制御部6は、観測値用座標変換部に入力される観測値に応じて、観測値用座標変換部、相関処理部およびフィルタリング処理部で使用する座標系を該追尾装置の運用中に切り換え制御する。
(もっと読む)
測高レーダ装置
【課題】 マルチパスによる影響等を低減して良好な観測精度を有する測高レーダ装置を得る。
【解決手段】 レーダ送信信号としてメインパルスとこれに続くサブパルスの2つのパルスを用い、メインパルスを広い仰角覆域範囲に、またサブパルスをこの範囲内の、例えばマルチパスを生じやすい所定の仰角範囲に重複させて形成した送信ビームによりそれぞれ放射する。そして、その反射波から、メインパルス及びサブパルスに対応して独立に設けられた受信ビーム形成及び測高処理系により信号処理を行ない、それぞれの系から測高データを得たのちに、これらを平滑化する。
(もっと読む)
車両識別システム
【課題】より効率的に車両を識別する「車両識別システム」を提供する。
【解決手段】他車向き算定部5は、レーダ装置1が同じ他車に対して測定したレーダ反射強度の推移と、RCSテーブル群6のRCSテーブルが表す車両の各方向の有効レーダ反射面積より、現在の他車のカメラによって撮影される画像に写り込む向きを算定する。画像認識処理部4は、カメラ2が撮影された画像に対して画像認識処理を施して他車を識別する。また、この画像認識処理において、画像認識処理部4は、他車向き算定部5によって算定された向きを向いた車両の認識に好適化した画像認識を優先的に実行する。
(もっと読む)
システム航跡測定装置および航跡割当・航跡誤差補正処理方法
【課題】複数のセンサから得られる複数のセンサ航跡を用いて、正確な、センサ航跡の航跡誤差推定、航跡割当およびシステム航跡を生成する。
【解決手段】ローカル航跡とリモート航跡のペアで航跡の組合せを作成し、各組合せの航跡ペアの差分を取って、組合せごとに算出したペアの差分の2乗和の最小値を1つ選択し、その最小値に対応する組合せを航跡割当とし、またペアの差分の2乗の頻度分布の最頻値の中から航跡バイアス誤差分散を算出する航跡割当処理部と、ローカル航跡とリモート航跡の航跡ランダム誤差分散と、航跡バイアス誤差分散に基づいて航跡バイアス誤差を算出する航跡誤差推定処理部と、航跡バイアス誤差分に基づいて補正した補正したリモート航跡とローカル航跡を重み付け統合してシステム航跡を生成する航跡統合処理部を備える。
(もっと読む)
標定レーダ装置
【課題】 機動性を損なうことなく全方位を監視し位置標定を行なうことの可能な標定レーダ装置を得る。
【解決手段】 標定レーダ装置の空中線部11を、互いに異なる仰角にペンシルビームを有する2つのアンテナ111及び112で構成するとともに、これら2つのアンテナを、方位方向の指向方位が互いに反対となるように配置する。そして、この空中線部11を駆動部12により方位方向に高速回転駆動することによって、異なる2つの仰角の全周方向に目標を捕捉するためのビーム幕を形成する。
(もっと読む)
レーダ装置
【課題】 2以上のアンテナまたはアレイアンテナ等からの信号を合成してビームを形成し、目標物を探知または追尾する際、処理効率の良いレーダ装置を得ることを目的とする。
【解決手段】 複数の受信アンテナ1−1〜1−n、受信アンテナ1−1〜1−nのそれぞれに接続した受信モジュール2−1〜2−n、受信モジュール2−1〜2−nからの受信信号を合成して方位方向の受信ビームを形成する方位方向信号合成装置51および受信モジュール2−1〜2−nからの受信信号を合成して仰角方向の受信ビームを形成する仰角方向信号合成装置52を備える。
(もっと読む)
目標追尾装置
【課題】早期に高精度な着弾位置の推定値を得るように、どのセンサがどの目標をいつからいつまで観測するかの効率のよいセンサの割当てスケジュールを決定する目標追尾装置を得る。
【解決手段】複数のセンサ4a〜4dにより複数の目標1a〜1dを観測し、この観測結果に基づき、追尾処理部5により追尾処理を行い、この追尾処理された追尾情報に基づいて軌道推定部7により目標の着弾までの軌道情報を推定し、次いで、この軌道情報に基づいて、要求精度算出部8により、満たすべき追尾精度要求を算出し、この算出された追尾精度要求を満足するように、どのセンサがどの目標をいつからいつまで観測するかの割当てスケジュール10を割当て部9により決定し、センサ制御部11がこの割当てスケジュール10どおりに複数のセンサ4a〜4dを制御するようにした。
(もっと読む)
誘導弾
【課題】移動していない目標に対しても誘導精度を劣化させないで誘導できる誘導弾。
【解決手段】アンテナ13からの送信波の反射波を該アンテナで受信する受信機14と、受信した信号に基づき目標を検出して目標信号を出力する目標検出部15と、目標信号に基づき推定した推定位置信号を出力する追随制御部16と、外部から与えられた目標の推定位置情報にしたがって略鉛直方向から目標に接近するように誘導弾を誘導し、誘導弾の機軸が鉛直方向になった後は、追随制御部からの推定位置信号に基づき誘導弾を誘導する誘導制御部17とを備えた電波誘導装置1を搭載した誘導弾であって、追随制御部は、誘導弾の機軸が鉛直方向になった後に、地表までを測距して得られた測距値に基づき目標の捕捉範囲を設定し、目標検出部は、追随制御部で設定された捕捉範囲内で目標を検出して目標信号を出力する。
(もっと読む)
撮影制御装置、撮影制御方法、制御プログラム、制御プログラムを記録した記録媒体、撮影制御システム、および情報処理システム
【課題】 RFIDタグを含む物品を所持した人間の撮影をより的確に行うことを可能とする撮影制御装置を提供する。
【解決手段】 物品に取り付けられたRFIDタグの位置情報がリーダライタから受信されると、この情報が物品情報格納部51に格納される。位置判定部35は、指定エリア外となる物品を検出すると、防犯カメラ制御部32による撮影制御が開始される。防犯カメラ制御部32は、該当物品の位置情報の履歴に基づいて該当物品の移動方向を推定し、該移動方向および物品の現在位置に基づいて、撮影動作すべき防犯カメラを特定し、該防犯カメラに対して撮影動作制御を行う。
(もっと読む)
物体検出装置
【課題】 検出した物体に高精度な情報を設定できる物体検出装置を提供することを課題とする。
【解決手段】 レーダによる情報と画像による情報に基づいて物体を検出する物体検出装置1であって、レーダによって物体を検出するレーダ検出手段2と、画像によって物体を検出する画像検出手段3と、レーダ検出手段2によって検出した物体の位置情報と画像検出手段3によって検出した物体の位置情報に基づいて、レーダ検出手段2によって検出した物体と画像検出手段3によって検出した物体とが同一物体か否かを判断する判断手段8とを備え、判断手段8で同一物体と判断した物体については、レーダ検出手段2によって検出した当該物体の横方向のデータと画像検出手段3によって検出した当該物体の横方向のデータとの位置関係に基づいて横幅及び/又は横位置の設定方法を変更することを特徴とする。
(もっと読む)
追跡方法及び装置
人又は動物を追跡する方法を開示する。移動体装置は人又は動物によって運ばれ、この移動体装置は、少なくとも1つの慣性センサと、移動体装置から基地局へデータを送信するための無線送信機とを含む。慣性センサの出力データは人又は動物によって移動される歩数の計数に使用され、移動される歩数と人又は動物の歩幅データとに基づいて人又は動物の位置が予測される。 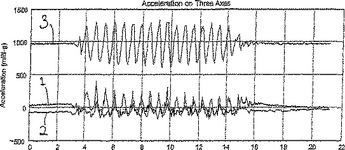 (もっと読む)
(もっと読む)
目標特定評価装置
【課題】目標のRCSの距離、向きによる変化から、特定結果を判定し、電波データなどでは絞り込めなかった、複数の目標の特定結果を絞り込み、確度の高い特定結果を可能とする目標特定評価装置を得る。
【解決手段】任意のシナリオに基づき複数の疑似的な目標を発生する疑似目標発生部25と、電波探知装置等の覆域を算出する覆域評価部26と、探知した目標の電波目標データ等を作成する目標探知模擬部100と、距離−RCSデータ等と目標特定結果の対応関係を格納するデータベースを作成するデータベース作成部33と、電波目標データ等をデータベースと比較・照合することにより目標を特定する目標特定部39と、特定結果を更新する特定結果評価部40と、特定結果を表示する結果表示部42と、特定結果を統計的に処理する特定結果処理部38と、特定結果の処理結果に基づきデータベースを更新するデータベース更新部43を設けた。
(もっと読む)
誘導装置
【課題】 従来は、目標に向け電波を送信し、目標から直接反射信号を受信して目標信号を検出し追尾しており、目標からの反射波が海面や地表面等のクラッタ信号の受信時、目標方向と異なる方向に目標がいると認識しマルチパスを追尾し、誤ロックしていた。
【解決手段】 従来、単一偏波での送受信を行っていたが、本方式は、水平偏波による送受信(HH信号)と垂直偏波による送受信(VV信号)の2種類の偏波方式での送受信方式とした。目標からの直接反射波と、海面や地表面を経由するクラッタ反射波(マルチパス)では、HH信号とVV信号で位相差が180度ずれる。この位相差を用いて信号処理することにより、目標からの直接反射信号とクラッタ反射波(マルチパス)を分離し、クラッタ反射波(マルチパス)の影響を受けずに目標に追尾し、ロックオンを保持することが可能になる。
(もっと読む)
追尾モデルの管理
たとえばレーダによって検出された航空機など、遠方の目標の複数の軌跡を同時に維持する方法および装置が開示されている。それぞれの軌跡は、追尾目標についての、考えうる様々な力学的特性を示すモデルプロセスのセットにより、維持される。モデルは、完全にまたは大部分、互いに独立に振る舞うことができる。新たなセンサ情報を用いてモデルを更新するべきか否かは、それぞれの軌跡内のそれぞれのモデルについて、別個に決定される。 (もっと読む)
レーダ装置
【課題】 広帯域の電波の送受信を必要とせず、目標類別の精度が高い目標類別装置を得る。
【解決手段】 目標に送信信号を照射し、反射波を受信して受信信号を出力する送受信機20と、受信信号から目標の軌跡を推定する追尾処理部30と、受信信号を処理してクロスレンジプロフィールを生成するクロスレンジプロフィール生成部40と、クロスレンジプロフィールから特徴量を算出し、目標の類別を行う類別処理部50を備え、クロスレンジプロフィール生成部40は、オートフォーカス処理部42において受信信号のドップラー周波数の変化量を抽出し、アスペクト角変化量推定部44は、そのドップラー周波数の変化量を用いて目標のアスペクト角の変化量を推定する。そしてクロスレンジスケーリング部45において、アスペクト角変化量推定部44で推定したアスペクト角の変化量を用いてドップラープロフィールをクロスレンジプロフィールに変換する。
(もっと読む)
誘導弾システム
【課題】 ホバリング中のヘリコプタに対しても効果的に対処できる、電波センサを用いた誘導弾システムを得る。
【解決手段】 電波センサとして、要撃管制装置1側に送受信部(1)11及び信号処理部(1)12を、また誘導弾側に送受信部(2)21及び信号処理部(2)22をそれぞれ備え、これら電波センサにより回転翼を有する対象目標を検出し、その目標情報を取得する。また、要撃管制装置1側での要撃計算の結果として対象目標との予想会合点とともに、所定のホーミング時間が確保された上方円弧状の飛翔経路情報、及びゲインを算出し、これらを誘導弾2側に指示する。さらに、誘導弾2におけるホーミング誘導計算の実行時には、操舵量に対するゲインとして、要撃管制装置1側で取得したゲインと誘導弾2側で取得したゲインとを相補的に適用し、対象目標への誘導接近中における良好な誘導精度を維持する。
(もっと読む)
同一航跡判定装置
【課題】航跡作成装置が異なるセンサであっても、処理負荷を削減し、なおかつ、それまでに得られた信頼度を蓄積し、多くの航跡が密集した状態等、位置運動情報(航跡間の距離及び速度)に差がつかない状況においても、安定した確度の高い相関結果を得ることのできる同一航跡判定装置を得る。
【解決手段】従来の同一航跡判定装置の位置相関判定器7に目標類識別データ選択器11および目標類識別相関判定器12を取りつけ、位置相関判定で絞り込まれた相関の可能性がある航跡対を、目標特徴量から類推される目標類識別結果を用いてさらに絞り込む。次に従来の同一航跡判定装置の尤度算出器14に信頼度算出器15を、信頼度算出器15に信頼度記憶器16を取りつけ、航跡データ対についての信頼度を尤度算出器14で算出された尤度、及び信頼度記憶器16に記憶されている1サンプリグ前の信頼度を用いて算出する。
(もっと読む)
目標検出方法
目標を識別するためにレーダーシステムのようなセンサーからの反射を処理する方法が提供される。本方法は、よりよい識別能力を与えるために、数回の走査からのデータを集積するために、検出前トラックルーチンを使用する。しかながら、検出前トラックルーチンの実行においては、多数の目標の動きが仮定され、この様な動きを説明するために、データが組み合わせられる。閾値以上の結果は、目標が存在し、仮定された速度で移動することを示す可能性がある。正確な目標動き仮定で組み合わされたデータは、一時的な雑音および反射妨害よりもより持続性があるので、本方法は、より正確な目標検出を提供する。一旦目標が識別されると、それは、別の探索においてデータセットから取り除かれることが好ましい。 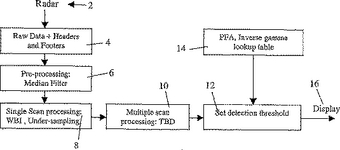 (もっと読む)
(もっと読む)
61 - 80 / 91
[ Back to top ]