
Fターム[5J070BB01]の内容
レーダ方式及びその細部 (42,132) | 追跡(追尾) (806) | 追跡一般 (468)
Fターム[5J070BB01]の下位に属するFターム
Fターム[5J070BB01]に分類される特許
81 - 91 / 91
チャンネルインパルス応答の推定方法
時間に依存するチャンネルのインパルス応答を推定するために、超音波信号等の連続的なインパルス信号が送信され、上記チャンネルから受信される対応する信号がサンプリングされる。インパルス信号の行列の逆行列が計算され、上記受信信号のサンプルへ適用される。  (もっと読む)
(もっと読む)
目標追尾装置
【課題】 運動モデルの信頼度の発振や、観測雑音低減性能の劣化を招かない閾値を算出して、追尾精度を高めることができる目標追尾装置を得ることを目的とする。
【解決手段】 信頼度算出器12により算出される等速直線運動の運動モデルの信頼度が所定値より高い領域内に、その運動モデルを用いて算出された予測位置を中心とする誤差楕円体が収まる閾値Aを算出する。これにより、運動モデルの信頼度の発振や、観測雑音低減性能の劣化を招かない閾値が得られ、追尾精度を高めることができる。
(もっと読む)
追尾装置

【課題】偽像を目標とする仮説を排除しながら、効率的に追尾処理を行うことができる追尾装置を得る。
【解決手段】各センサで得られた受信電波から目標に当たり反射した反射電波を抽出する波形抽出部4と、2つのセンサに反射電波が到達する時刻の差によって等距離差双曲面を計算し、別の2つセンサの組み合わせからも等距離差双曲面を計算し、さらに複数の等距離差双曲面の交点であって、目標の位置である測位情報を計算する測位情報計算部5と、前記測位情報に基づいて、目標の運動諸元を推定する追尾フィルタから算出される目標の航跡と、航跡の組合せにより仮説を生成し、追尾処理を実施する多重仮説生成追尾処理部61と、前記多重仮説生成追尾処理部によって生成された仮説中に、偽像を目標と見なす仮説が含まれているか否かを判定し、含まれている場合には前記偽像を目標と見なす仮説を除去する仮説絞込み部62とを設けた。
(もっと読む)
追尾レーダ装置
【課題】目標を捕捉してから追尾モードの移行に関る手動操作を簡単化できる追尾レーダ装置を提供する。
【解決手段】指定方向へ捕捉ビームを走査する走査手段1、8及び9と、走査手段で捕捉ビームを走査することにより探知された目標を追尾する追尾モードに自動的に移行させる移行手段4、7と、移行手段により移行された追尾モードにおける目標の追尾状況を表示する表示手段5と、追尾継続の可を入力する入力手段6と、所定の追尾制限回数内に入力手段によって追尾継続の可が入力されない場合に、追尾を自動的に終了させる制御手段7とを備える。
(もっと読む)
防空シミュレーションシステム
【課題】防空要素の配置にかかるユーザの手間を軽減できるようにし、これにより便宜の向上を図った防空シミュレーションシステムを提供すること。
【解決手段】ユーザが設定した防空エリアをメッシュ状に複数の小領域に分割し、各小領域にレーダ11cを配置したと仮定した場合のレーダ覆域面積を、デジタルマップの3次元データに基づいて算出する。その結果を、メッシュの表示色を階調的に変化させることによりGUI表示する。そして、ユーザにより選択指定されたメッシュのそれぞれにつき、シミュレーションにより防空指標を算出してその結果をユーザに提示する。
(もっと読む)
レーダ装置
【課題】 1つの追随航跡に含まれる目標の機数を正確に判定することができるレーダ装置を得る。
【解決手段】 対象となる目標11に追随しながら指向性をもつ追随ビームを送信し、目標からの反射波を受信して目標の検出、追随、情報管理、類識別及び表示を行うレーダ装置2において、目標を検出するためのレンジビン401内における第1の目標の機数を検出するとともに、追随フィルタの相関ゲート402内でかつレンジビン401外における第2の目標の機数を検出する。前記の第1の目標の機数及び第2の目標の機数を加算して総合機数を判定する。
(もっと読む)
レーダ装置
【課題】周波数選定範囲が狭い場合であっても、目標検出性能および追尾能力を向上できるレーダ装置を提供する。
【解決手段】送受信したPRI間の信号をフーリエ変換して得られたドプラ周波数軸上において目標の検出処理および追尾処理を含む処理を行うレーダ装置において、PRIの基準時間をオフセットさせることによって、位相パターンのドプラ周波数軸に対する傾きが異なる複数の複素ウェイトを算出するウェイト演算部45と、算出された複数の複素ウェイトが順次設定されることにより形成されたフーリエ変換によるフィルタバンクによってフィルタデータを得るフーリエ変換処理部42と、得られた複数のフィルタデータから、フィルタバンクを構成するフィルタ毎に、複数の複素ウェイト間の最大値を検出する最大値選定処理部43と、最大値選定処理部における検出結果に基づいて目標を検出する目標検出処理部44とを備える。
(もっと読む)
位置情報の決定
物体(102)に関する位置情報を決定するための機器(200)であって、複数の受信エレメント(212、214、216、218)を含む、受信するための手段(210)と、受信エレメント(212、214、216、218)で受信された信号(106)を検出し、受信信号を表す出力信号を生成するための検出手段(230)と、各受信エレメント(210)ごとに、他の任意の受信エレメント(212、214、216、218)で受信される信号から生成される任意の出力信号とは別に、その受信エレメント(210)で受信される信号から生成される出力信号にプロセスを適用し、その結果、その受信エレメントで受信される信号(106)を表すパラメータのそれぞれの値を得るように動作可能な処理手段(260)とを含み、処理手段(260)はさらに、こうして得られたパラメータの値を比較し、その結果、物体に関する位置情報を取得するように動作可能な機器(200)。  (もっと読む)
(もっと読む)
レーダ装置
【課題】 自移動体の航路策定に対する影響の高い周辺移動体の識別を容易にする。
【解決手段】 レーダ装置10は、探知信号に基づいて周辺移動体の動作変化量を算出する動作変化量算出部24と、動作変化量の所定値に対する大小を判別する動作変化量判別部26と、を備える。出力部12は、探知結果に加えて、動作変化量判別部26による動作変化量の判別結果を出力する。
(もっと読む)
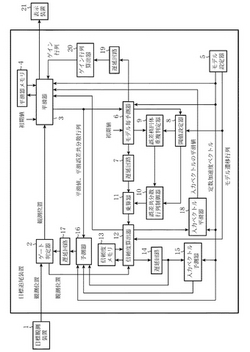
エコー照合装置
【課題】 基準エコーマップと観測エコーマップの基準原点がオフセット誤差を持つ場合でもエコー照合時の誤照合を少なくする。
【解決手段】 重心追尾手段1は、捜索レーダからの目標群の位置情報をもとに、目標群の重心推定位置と重心推定速度を求め、基準エコーマップ作成手段2は、目標群の位置情報をもとに基準エコーマップを作成する。エコーマップ補正手段3は、別レーダから得られた観測エコーマップと、重心推定速度と、基準エコーマップを入力し、観測エコーマップの位置補正を行い、相関手段4は基準エコーマップの基準エコーと観測エコーマップの観測エコーの対応付けを行う。
(もっと読む)
レーダ装置
【課題】 ISAR画像とレンジプロファイルの実長さを合わせて上下に並列にならべて表示することで、レンジ方向の反射強度分布とドップラ周波数の関係を明確にしてISARによる船舶目標の識別確度を向上させる。
【解決手段】 送信信号を発生する送信機1と、送信信号を放射するとともに目標からの反射信号を受信するアンテナ3と、反射信号を受信処理してビデオ信号を生成する受信機4と、ビデオ信号に対して合成開口処理を行いISAR画像信号とレンジプロファイルの画像信号を生成するISAR処理部5cと、これら画像信号を同一画面上に表示させる表示信号を生成する表示処理部5dとを備えている。
(もっと読む)
81 - 91 / 91
[ Back to top ]