
Fターム[5J070BB01]の内容
レーダ方式及びその細部 (42,132) | 追跡(追尾) (806) | 追跡一般 (468)
Fターム[5J070BB01]の下位に属するFターム
Fターム[5J070BB01]に分類される特許
1 - 20 / 91
移動物体監視システム
【課題】監視エリアにいる人物と携帯機とを対応付けし、携帯機を持たない不審者を確実に検出する。
【解決手段】移動物体が携帯機を帯同しているか否かを監視する移動物体監視システムであって、センシングにより監視エリアに存在する移動物体の位置情報を検出し、また、携帯機が発した無線信号から当該携帯機の位置情報を検出し、位置情報の一致性に基づいて移動物体と携帯機とを対応付けする。このとき、移動物体の位置情報に応じて、一定判定の基準を異ならせる。これにより、監視エリア内のセキュリティレベルが高い場所ほど厳格な基準で移動物体と携帯機との対応付けがなされ、利便性と安全性を兼ねた高品質な移動物体の識別・監視を行うことができる。
(もっと読む)
侵入検知システム、侵入検知用子機、侵入検知用親機、侵入検知方法および侵入検知プログラム

【課題】検知対象エリア内のどの場所に侵入者が存在するかを特定することが可能な侵入検知システム、侵入検知用子機、侵入検知用親機、侵入検知方法および侵入検知プログラムを提供する。
【解決手段】侵入検知用子機102a,102b,102c,102dが送信する無線信号の送信エリアは、侵入検知用親機101の設置位置を含み、かつ侵入検知用子機102a,102b,102c,102d間で互いに異なる。侵入検知用親機101は、侵入検知用子機102a,102b,102c,102dからそれぞれ送信された無線信号を受信し、受信した各無線信号に基づいて、空間特徴量を無線信号ごとに算出し、算出した空間特徴量に基づいて無線信号に対応する送信エリアにおける人間の動作を検知する。
(もっと読む)
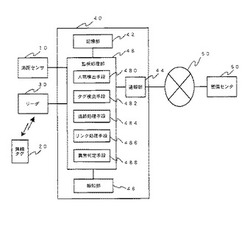
移動物体監視システム
【課題】熱線センサ等の移動物体センサとユーザが携帯するICタグとで監視エリアにおける不審者を検知する監視システムにおいて移動物体センサが人物を検出したときに、単に当該監視エリア内にてICタグ等の携帯装置の存在を検知するだけでは、検出された人物が当該携帯装置を身につけているとまでは判断できない。
【解決手段】リーダ部22及びタグ検出手段42は、無線タグ16が発した無線信号を受信して、無線タグ16の位置を検出する。リンク処理手段44は、センサ部20が検知した人物の位置と無線タグ16の位置とを照合してそれらを対応付ける。確度判定手段46は人物と無線タグ16との対応関係の持続性に基づいて、当該人物が無線タグ16を帯同している確度を判定する。監視装置は確度を所定の閾値と比較することにより人物が無線タグ16を帯同しているか否か判定する。
(もっと読む)
車列長測定装置、車列長測定方法及び車列長測定用コンピュータプログラム
【課題】特殊な車両及び車両を後方から撮影するカメラを用いずに、車両の列の長さを測定できる車列長測定装置を提供する。
【解決手段】車列長測定装置は、所定の検知範囲内の車両の前面に対向して設置されたセンサから取得したセンサ信号に基づいて車両を検知し、検知された車両の位置及び速度を求める車両検知部21と、検知された車両のうち、センサに接近中でかつ最も近くを走行中の第1の車両の位置及び速度の変化から、第1の車両の停止位置を推定する停止位置推定部24と、推定された停止位置よりも車間距離だけセンサに近い位置を停車中の車両の列の最後尾と推定することで、停車中の車両の列の長さを求める車列長推定部25とを有する。
(もっと読む)
レーダ装置及びレーダ装置の動作方法
【課題】検出性能向上と妨害波誤検出確率の低下を両立するレーダ装置及びレーダ装置の動作方法を提供する。
【解決手段】複数のレーダパルスを照射する送信部とレーダパルスに対応する複数の受信データを生成する受信部と目標物を探知する探知部において、受信部は前記複数の受信データをレンジセル毎に受信波のデータを生成し、前記探知部は、前記複数の受信データの全てを対象として、前記受信波のデータを積分し、全範囲積分部と前記複数の受信データを複数のグループに分割し、前記複数のグループそれぞれについて前記受信波のデータを積分し、前記複数のグループに関する積分結果を示す複数のグループ積分データを生成するグループ積分部と前記全範囲積分データと前記複数のグループ積分データとを比較することにより、目標物を示すレンジセルを検出し、検出結果データを生成する比較判定部とを備える。
(もっと読む)
信号検出装置、信号検出方法及び信号検出プログラム
【課題】S/Nの低い受信信号であっても、検出漏れや誤判定の発生を抑制することができ、確信度がある程度ある目標があった場合に、追尾が継続しやすくなる追尾処理部を備える信号検出装置の提供。
【解決手段】音波や電磁波を発信し、目標からの反響信号の受信信号を所定の区間切り出して反響信号のスペクトルに変換した上で特徴抽出を行いパターン認識用のパターンを生成する前処理部と、入力されたパターンをあらかじめ学習されたSVM(サポートベクターマシーン)により、目標らしさを判定し、その出力を正規化し確信度として出力するパターン認識部と、確信度を閾値判定し、検出ありと判定された場合は、目標の方位距離やS/Nなどの検出目標に関わる情報を算出する目標情報算出部と、追尾処理に位置情報以外のSVMなどのパターン認識処理自体の出力値である確信度値を活用した追尾処理部を備える。
(もっと読む)
指示支援装置
【課題】本発明は、近接した複数の目標から到来した反射波、またはその反射波が示す画像を処理することにより、これらの複数の目標の区分を図る指示支援装置に関し、近接した複数の目標の寸法ならびに相対的な配置に柔軟に適応し、これらの目標の区分のために要する処理量を安定に削減できることを目的とする。
【解決手段】到来した反射波と前記反射波が示す画像との何れかで示される複数mの目標について、個別の区分の可能性を判別する判別手段と、前記可能性が所定の閾値以下であるときに高分解能アルゴリズムに基づいて、前記可能性が前記所定の閾値を超えるときに前記高分解能アルゴリズムより所要する処理量が少ない簡易アルゴリズムに基づいて、それぞれ前記反射波または前記画像を処理することにより前記複数mの目標を区分する適応処理手段とを備える。
(もっと読む)
レーダ信号処理装置
【課題】 目標信号のパルス幅に対してサンプリング周波数を高くとった場合、デフルータ処理を行なう際に目標が複数のレンジビンにまたがるため、目標信号にもかかわらずブランキングレンジ処理を行なってしまい、目標のパルス幅を狭め、目標検出精度を低下させてしまうことがある。
【解決手段】 ブランキングレンジ判定において、ジャミング候補と判定されたレンジビンの前後Nレンジビン間に目標信号が存在するかを確認し、目標信号が存在した場合、そのレンジビンは目標として、ブランキングレンジ処理を行なわず、目標信号が存在しない場合、そのレンジビンはジャミングと判定し、ブランキングレンジ処理を行なう。
(もっと読む)
レーダ装置
【課題】 従来のレーダ装置は、全方位に亘って同一PRIを使用しているため、見通し外となる範囲を含む方位に対しても同一PRIを使用し、時間的リソースを有効に使用できていない。
【解決手段】 この発明のレーダ装置は、自己位置を検出する自己位置検出部と、前記自己位置検出部で検出した自己位置周辺の地形データを記憶する地形データベースと、前記地形データを用い前記自己位置を中心とした方位毎の見通し距離を算出し、当該見通し距離に基き方位毎のPRI(Pulse Repetition Interval)を算出する算出部と、前記方位毎のPRIに基いて、各方位に向けて前記方位に関連付けされたPRIの電波を放射する送信制御部とを備えるようにした。
(もっと読む)
レーダ装置
【課題】探知した目標について識別処理を行い、当該目標の具体的な種類(機種名等)の推定を行うことができるレーダ装置を提供する。
【解決手段】任意の方向にビームを形成して目標からの反射波を受信し、この受信結果から目標検出を行うレーダ装置であって、空中線1と、空中線1を介して送信信号を送信するとともに到来した反射波に基づいて受信信号を受信する励振受信部2と、励振受信部2により受信された受信信号に基づいて受信ビームを形成し、ビームデータとして出力するビーム形成部3と、ビーム形成部3により出力されたビームデータに基づいて信号処理することで目標に関する情報を検出するレーダ信号処理部(検出部5、相関部6、検出情報記録部7、追尾部8、RCS推定部10)と、レーダ信号処理部により検出された情報と予め記憶された機体の種類ごとの特徴を示す機体識別情報とを比較することで、目標が該当する機体の種類を推定する識別部11とを備える。
(もっと読む)
レーダ装置
【課題】監視範囲を捜索し目標を検出すると追尾するレーダ装置において、省エネルギー化を実現する。
【解決手段】追尾処理部4から受信した目標の予測位置・予測S/Nに基づき、目標予測S/Nが上限検出確率より算出される上限S/Nを超えないように、目標予測位置に照射する追尾ビームの諸元(ヒット数・パルス幅)を制御するビーム諸元変更部5を設け、送信電力を削減する。更に、目標予測部41から受信した目標ドップラ周波数に基づき、周波数特性の異なる複数のクラッタ抑圧フィルタ303から利得が高くなるフィルタを選択するクラッタ抑圧フィルタ指示部305と、前記目標ドップラ周波数付近に限定したドップラバンクを周波数特性の異なる複数のドップラバンクから選択する目標ドップラバンク指示部307を設けて、信号処理負荷を削減し検出利得を向上させることにより、過剰に消費していた電力を大幅に削減する。
(もっと読む)
パラメータ検出器、レーダ装置、誘導装置、及びパラメータ検出方法
【課題】正確なドップラ周波数の検出をすることができるパラメータ検出器、レーダ装置、誘導装置、及びパラメータ検出方法を提供する。
【解決手段】パラメータ検出器は、キャリア周波数が異なる複数の周波数バンドからなる周波数ホッピングの信号がドップラシフトを受けて周波数が変化した受信信号について、複数サンプルのベースバンド信号に変換するベースバンド変換部と、前記ベースバンド信号を、各々フーリエ変換して、周波数スペクトルを生成するフーリエ変換部と、前記周波数スペクトルを、変換後の同一時刻ビン番号に関して、周波数バンド毎に前記キャリア周波数に対応して異なる参照時刻で逆離散フーリエ変換して変換サンプル列を得る逆フーリエ変換部と、前記変換サンプル列を用いて相関行列を生成し、超解像度法によりドップラ周波数を検出する周波数検出部と、を有する。
(もっと読む)
複合誘導装置及び複合誘導方法
【課題】広い周波数帯でのインターフェロメータでの測角処理を短時間で効率良く行い得る。
【解決手段】飛しょう体における略円筒筐体となるレドーム先端の円形領域の中央に配置され、レドームを通じて飛しょう体正面方向からの電波を受信する第1のパッシブアンテナ素子群と、レドームの側面に周面に沿って配置され、第1のパッシブアンテナ素子群の観測測角範囲より広角の電波を受信する第2のパッシブアンテナ素子群と、観測する周波数帯に応じて第1のパッシブアンテナ素子群のうち配列間隔が異なる複数の素子を選択し、これら選択した複数の素子それぞれの受信信号及び第2のパッシブアンテナ素子群のうち任意の素子の受信信号を用いて目標方向の方位角及び高低角のうちの少なくとも1つを粗測角演算するパッシブ信号処理部と、パッシブ信号処理部で得られる粗測角演算結果に基づいて飛しょう体を目標方向に誘導する誘導手段とを備えた複合誘導装置を提供できる。
(もっと読む)
精測進入レーダ及びレーダ表示処理方法
【課題】目標検出処理により検出された目標を運用者が容易に識別できるようにする。
【解決手段】精測進入レーダは、電子走査式空中線1からレーダ波を送信し、その反射波を受信するレーダ送受信機2と、反射波の受信信号をもとに目標を検出し、検出された目標のうち予め決められた上限数以下のターゲットデータを出力する目標検出部33と、受信信号からレーダビデオデータを作成し、目標検出部33により検出された目標の位置情報に基づいて、レーダビデオデータに検出フラグを付加するビデオ作成部32と、レーダビデオデータをもとに検出フラグの有無に応じてレーダビデオの表示態様を変更し、ターゲットデータに基づいてシンボルを重畳表示するレーダ表示部5とを具備する。
(もっと読む)
目標追尾装置および目標追尾方法
【課題】目標追尾情報のうちから一部を選定して出力する目標追尾装置について、新たに選定された目標追尾情報が出力された当初から信頼性が高い状態であって、さらには真に必要とされる目標追尾情報のみを選定して出力する目標追尾装置および目標追尾方法を提供する。
【解決手段】目標探知範囲に存在する全目標を捕捉する全目標捕捉部と、前記全目標捕捉部によって捕捉された全目標の追尾を常に行ってそれぞれの目標追尾情報を第1の目標追尾情報として出力する全目標追尾部と、前記全目標の中から指定された条件に合致する目標の目標追尾情報のみ前記全目標追尾部の出力から選定して出力するための前記条件が入力される条件入力部と、前記第1の目標追尾情報が入力され、前記条件入力部への入力によって選定された目標についてのみ第2の目標追尾情報として出力する出力情報選定部と、を備える。
(もっと読む)
監視装置、方法及びプログラム並びに監視システム
【課題】
バードストライクの危険のある鳥の接近を監視し、警告する。
【解決手段】
レーダ装置(10)が、周囲を走査して得られるレーダ画像データを周期的に出力する。コンピュータ(30)で動作する監視プログラムの背景生成機能(32a)が、複数シーン数のレーダ画像データから背景画像データを生成し、背景除去機能(32c)が、その後のレーダ画像データから背景画像データを除去する。2値化機能(32d)がエコー画像を2値化し、中心決定機能(32e)が各エコー画像の中心を決定し、雨雪除去機能(32f)が、雨雪を除去する。追跡機能(32g)は、複数シーンの前雪除去結果から、鳥を追跡する。警告機能(32h)は、鳥が所定領域に入ると警告を出力する。
(もっと読む)
レーダ装置
【課題】安定した相関追尾ができるレーダ装置を提供する。
【解決手段】FMCW方式のダウンスイープまたはアップスイープの信号を繰り返し送受信する送受信器20と、送受信器からの信号に基づく測角値を用いてビート周波数の空間を表すfbx−fby軸に座標変換するビート周波数軸変換部36と、ビート周波数軸変換部における変換によって得られたfbx−fby軸の空間において位置、速度および加速度を用いて相関追尾を行う相関追尾部37と、相関追尾部における相関追尾によって得られた結果をX−Y軸の位置および速度に変換するX−Y軸変換部38を備える。
(もっと読む)
レーダ装置
【課題】目標が予め分かっていない状態でも瞬時に受信電力が最大となる最適偏波が送信可能な偏波制御型のレーダ装置を得る。
【解決手段】レーダ装置は、異なる偏波状態を有する複数の信号が送信可能なアレーアンテナと、異なる偏波状態の信号をアレーアンテナに出力する2つの送信機と、異なる偏波状態の受信信号として出力する2つの受信機と、2つの受信信号それぞれに対して直交符号との相関に基づいて各偏波成分を分離する符号分離手段と、2つの受信機のいずれかを符号分離手段に接続する第2の切換手段と、各偏波成分を用いて受信電力が最大となる偏波状態を推定する偏波推定手段と、受信電力が最大となる偏波状態に基づいて送信機から送信される信号の偏波状態を制御する偏波制御手段と、を備え、前記アレーアンテナから同時に同一周波数の複数の信号が送信される。
(もっと読む)
目標追尾装置
【課題】必要最小限のセンサ使用回数を効率的に決定することができる目標追尾装置を提供する。
【解決手段】目標追尾装置10は、追尾処理部2と、レーダ制御要否判定部3と、レーダ使用回数決定部4と、レーダ指示部5とを有している。追尾処理部2は、レーダ群1から得られた観測値を用いて目標の運動諸元を算出して、その算出した運動諸元から、目標航跡を導出するとともに、目標航跡の誤差共分散行列を算出する。レーダ制御要否判定部3は、目標航跡の誤差共分散行列に基づく目標航跡の推定精度と要求精度とを用いて、レーダ制御を実施するか否かを判定する。レーダ使用回数決定部4は、目標航跡の誤差共分散行列と、センサ毎の観測精度及び要求精度とを用いて、第1及び第2レーダ1a,1bのそれぞれについてのセンサ使用回数を制約付き最適化問題から導出する。
(もっと読む)
レーダ処理装置
【課題】信号処理に最大限の処理時間を費やせるレーダ処理装置を得る。
【解決手段】観測諸元を管理してレーダによる観測を制御する観測制御部1と、複数の追尾処理単位の情報を格納する追尾処理データベース4と、受信信号を信号処理する信号処理部2と、目標の追尾処理を行う追尾処理部3と、観測緒元に基き、追尾処理データベース4から対象とする追尾処理単位の情報を取り出して追尾処理単位の処理時間の上限値を算出し、算出した追尾処理単位の処理時間の上限値及び観測諸元を出力する追尾処理負荷予測部5と、予め設定されているレーダが電波を受信してから追尾結果を出力するまでの時間の上限値から、前記追尾処理単位の処理時間の上限値を引いて信号処理に費やせる処理時間を算出し、算出した信号処理の処理時間及び前記観測緒元に基づいて、信号処理の処理時間を規定するパラメータを変更して信号処理部2へ出力する信号処理内容変更部6とを設けた。
(もっと読む)
1 - 20 / 91
[ Back to top ]