
Fターム[5J070BB04]の内容
レーダ方式及びその細部 (42,132) | 追跡(追尾) (806) | 追跡一般 (468) | 二次元追跡 (61)
Fターム[5J070BB04]に分類される特許
1 - 20 / 61
追尾装置
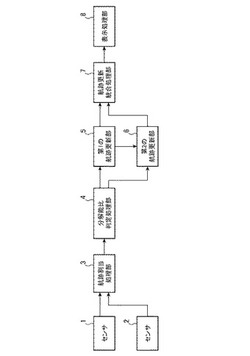
【課題】高分解能センサ及び低分解能センサによる航跡に対して正確な割り当てを行うことで、真の目標数分の航跡を生成する。
【解決手段】目標を観測して航跡を生成するセンサ1と、センサ1より低分解能であり、目標を観測して航跡を生成するセンサ2と、センサ1,2により生成された航跡を1対1で割り当てる航跡割当処理部3と、割当結果に応じて、センサ1により生成された航跡を、センサ2により生成された対応する航跡に基づいて更新する第1の航跡更新部5と、割当結果に応じて、センサ1により生成された未割当ての航跡を、センサ2により生成された複数の航跡に基づいて更新する第2の航跡更新部6と、センサ1,2の分解能比に基づいて、第1,2の航跡更新部5,6の動作を制御する分解能比判定処理部4と、更新された航跡を統合する航跡更新統合処理部7とを備えた。
(もっと読む)
レーダ装置及び目標位置算出方法

【課題】レーダ装置により算出される目標位置観測値のバタつきを抑制し、目標追尾処理を安定化させること。
【解決手段】本発明に係るレーダ装置(1)は、データ生成部(30)と、目標検出部(42)と、目標距離算出部(43)とを備える。データ生成部(30)は、追尾目標から受信した反射波に関するデータ(DA)を、レンジビン毎に生成する。目標検出部(42)は、距離ゲート(RG)内においてデータ(DA)が閾値レベル(TH)以上であるレンジビンの集合、あるいは、レンジビンの集合に振幅レベルが閾値レベル(TH)未満であるレンジビンがあるものの当該レンジビンの数や幅(隣接レンジビンの振幅レベルが閾値レベル(TH)未満であるレンジビンの数)が規定を満足しており集合と認められるものを、追尾目標に対応する目標レンジビン集合(TBG)として抽出する。目標距離算出部(43)は、目標レンジビン集合(TBG)に属する全レンジビンが示すそれぞれの距離の平均値を、追尾目標への距離である目標距離(R)として算出する。
(もっと読む)
追尾装置
【課題】フィルタを簡易に切り替えて早期に目標に追従可能とし、計算量の削減を図る。
【解決手段】等速直線運動モデル、蛇行運動モデル、多重運動モデルに基づくカルマンフィルタを用い、観測値から予測値、予測誤差共分散行列、観測誤差共分散行列および平滑値を算出する各カルマンフィルタ処理手段3〜5と、観測値、カルマンフィルタ処理手段3による各値に基づいて、目標が等速直線運動であるかを判定する等速直線運動判定手段7と、観測値、各カルマンフィルタ処理手段による各値に基づいて、各運動モデルに対する尤度を算出する尤度計算手段6と、各運動モデルに対する尤度および等速直線運動判定手段7による判定結果に基づいて、各運動モデルに対する信頼度を算出する信頼度計算手段8と、各運動モデルに対する信頼度に基づいて、各平滑値の加重平均値を算出する加重平均計算手段9とを備えた。
(もっと読む)
多目標追尾装置
【課題】誤警報等の不要信号が発生する環境下で、信号強度が弱い場合でも、運動が変化する目標の航跡の確立を早期に行うことができるとともに、演算負荷を軽減させることができる多目標追尾装置を提供する。
【解決手段】多目標追尾装置100は、センサとしてのレーダ10から観測値の信号を受ける。多目標追尾装置100は、観測値蓄積部1と、2次元相関決定追尾処理部2と、航跡確立判定部3と、不確定領域判定部4と、多次元相関決定追尾処理部5と、多次元サンプリング数制御部6とを有している。多目標追尾装置100は、全観測領域の観測値を用いて2次元相関決定追尾処理を行い、目標の有無が確定しない領域のみで、その領域で得られる観測値に対して多次元相関決定追尾処理を適用する。
(もっと読む)
パルスレーダ装置、パルスレーダ装置制御方法およびその制御用プログラム
【課題】1方向のみ観測するレーダ装置を用いて3次元レーダ装置の機能を実現する。
【解決手段】それぞれ異なる位置に設置され、重複する空間に発信電波を発信するように配置された空中線部を有するパルスレーダ10およびパルスレーダ20が目標物に係る信号の検出時刻、距離および視線方向速度を算定して目標物データとしてそれぞれ出力し、この各目標物データを時刻補正部40が同一時刻のデータとして補正し、時刻補正された目標物データおよび各パルスレーダの空中線部の位置座標データに基づいて目標座標算定部50が目標物の高度情報を含む3次元情報を算定する。
(もっと読む)
航跡表示装置
【課題】 この発明は、遅延決定型の航跡決定方式において、過去および最新の航跡決定における誤りを是正することができ、オペレータの意思決定に必要な航跡情報をより正確に表示することができる航跡表示装置を提供する。
【解決手段】 航跡判定部110は前回抽出航跡を保管しており、今回抽出航跡が前回と異なる観測値から構成されている場合、航跡表示情報生成部140は前回抽出された航跡から生成された航跡のうち最高尤度を持つ航跡と今回航跡による尤度差比較を行い、比較結果に応じて航跡の表示形態を決定する。
(もっと読む)
RFIDタグの動き追跡技術
【課題】RFIDタグの動きを追跡する技術を提供することを目的とする。
【解決手段】
信号強度情報を使用してRFIDタグの動きを追跡する技術である。移動中のRFIDタグから読み取り値の系列を取得するために、RFIDリーダの単一のアンテナが使用されてもよい。信号強度インジケータ(例えば、受信信号強度インジケータ(RSSI))は、読み取り値毎に判定される。RSSIの系列は、RFIDタグの動きの経路と、その経路に沿ったRFIDタグの動きの方向を推定するために使用される。
(もっと読む)
飛翔体探知方法及びシステムならびにプログラム
【課題】飛翔体の3次元位置を特定する飛翔体探知方法等を提供する。
【解決手段】地上を飛翔する飛翔体を撮影可能な観測器及び撮影画像を送信する送信器を備えた少なくとも2機の人工衛星と、送信された少なくとも2枚の画像データを受信するためのアンテナとアンテナにより受信した少なくとも2枚の画像データを解析して飛翔体の位置を解析する位置解析装置とを備えた基地局とで構成される飛翔体探知システムであって、位置解析装置は、各々の人工衛星の頂角及び方位角を算出する算出部と、これら頂角及び方位角から観測ベクトルを生成する観測ベクトル生成部と、各々の人工衛星の位置情報、速度情報等に基づいて座標変換行列を生成する座標変換行列生成部と、飛翔体位置初期値と座標変換行列とから係数を生成する係数生成部と、これら係数と観測ベクトルとから定められるパラメータ推定処理を実行するパラメータ推定処理部とを備えたことを特徴とする。
(もっと読む)
目標追跡装置
【課題】追跡精度を向上させることができる目標追跡装置を提供する。
【解決手段】目標を追跡するアクティブセンサ3からの観測値に基づく目標航跡と、目標の角度を測定するパッシブセンサ1からの観測値に基づく目標航跡とが同一目標を示していると判定した場合にこれら2つの目標航跡のデータ融合を行ってデータ融合航跡として出力するデータ融合部5と、データ融合部からのデータ融合航跡に基づいて、パッシブセンサからの観測値を入力して目標の航跡を算出するための補正情報を算出する補正情報算出部6aと、パッシブセンサからの観測値と補正情報算出部からの補正情報に基づいて、目標の航跡を算出して目標航跡として出力するパッシブセンサ処理部2aを備える。
(もっと読む)
目標追跡装置及び目標追跡方法
【課題】低SNR環境下においても目標を高精度に検出・追跡できるようにする。
【解決手段】目標追跡装置は、TBD(Track Before Detect)アルゴリズムを用いて受信信号から目標を検出する第1検出処理器6と、その検出結果をもとに目標を追跡する第1追跡処理器とを備える第1信号処理部4と、第1検出処理器6より高レートで受信信号から目標を検出する第2検出処理器10と、その検出結果をもとに目標を追跡する第2追跡処理器11とを備える第2信号処理部8と、第1検出処理器6で目標が検出されなかった場合は第1信号処理部4のみを実行させ、第1検出処理器6で目標が検出され、かつ第2検出処理器10で目標が検出されなかった場合は、第1信号処理部4と第2信号処理部8とを併用させ、第2検出処理10で目標が検出された場合は第2信号処理部8のみを実行させるように、受信信号の処理系統を判定する処理判定器3とを具備する。
(もっと読む)
目標追尾装置
【課題】複数のn次元角度センサと目標との交会角が小さな場合でも、追尾安定性を向上させた目標追尾装置を得る。
【解決手段】目標の追尾維持処理開始時の初期値算出にあたって、目標との仮説距離を用いた第1の追尾維持処理と、交会法により算出された距離を用いた第2の追尾維持処理とを並行して動作させ、それぞれの処理で目標航跡を取得しながら、それぞれの目標航跡に対する事後確率を算出し、この事後確率に基づいて2つの目標航跡を選択/統合した統合航跡を継続取得することによって目標の追尾を維持する。
(もっと読む)
目標表示装置
【課題】目標の位置精度に関する詳細な情報を得ることができる目標表示装置を提供する。
【解決手段】目標の誤差範囲境界線の倍率を設定する操作部1aと、外部から入力される目標の推定値および該推定値の誤差を示す誤差共分散行列と、操作部で設定された倍率とに基づき、目標の誤差範囲境界線を算出する制御部2aと、制御部で算出された目標の誤差範囲境界線を表示する表示部3を備える。
(もっと読む)
レーダシステム
【課題】単体で方位の異なる複数目標の同時観測を行い、各目標の高分解能画像を取得できるレーダシステムおよび信号処理方法を提供する。
【解決手段】航空機11が観測目標4を追尾し画像化するシステムにおいて、ビーム12を次々に切替えながらLPRF以上のパルスを送信する。すなわち、現状では送信した後ずっと目標方向を見ていたビーム12を、他方位の観測目標にも向けて観測を行う。ISAR画像解析において、本当に必要なのは観測目標4からの反射波だけであるので、受信ゲート14を開くタイミングを制御することで、受信ゲート14を従来の1目標あたりのPRI17よりも十分に小さくすることができる。このように、ビーム制御機能とタイミング制御機能を付加することで、多方位の複数の目標を同時に観測することができる。
(もっと読む)
ネットワークレーダシステム
【課題】 より信頼性の高い、目標追尾が行えるネットワークレーダシステムを得ること。
【解決手段】 目標の追尾に割り当てられているレーダと別の切替先レーダとの覆域が離れている場合、レーダ制御部を介して切替先レーダの探知テスト部を制御し、ビーム照射テストを実行させ、ビーム照射テストの結果、S/N比が所定の閾値以上のときは、レーダ制御部に目標を追尾するレーダを切替先レーダに切り替えさせ、ビーム照射テストの結果、S/N比が所定の閾値未満のときは、切替先レーダを除く複数のレーダの覆域や目標の探知状況から算出した目標の予測軌道から目標の追尾を実行させる新たな切替先レーダを割り当てるため、追尾レーダ割当計画を追尾レーダ割当計画算出部に再算出させ、レーダ制御部に目標を追尾するレーダを新たな切替先レーダに切り替えさせる追尾レーダ割当評価部を備える。
(もっと読む)
目標追尾装置
【課題】多次元相関決定時の演算負荷の減少を実現しかつ許容可能な解を導出する目標追尾装置を得る。
【解決手段】センサ観測値を入力情報とする航跡候補コスト行列生成手段110Aと、航跡分離状況判定手段130と、多次元相関決定手段120とを備えている。航跡候補コスト行列生成手段110Aは、航跡候補行列と、航跡候補の各々に対応するコストからなるコスト配列とを生成する。航跡分離状況判定手段130は、航跡が分離していると判定された場合には、航跡候補コスト行列生成手段110Aに対し、航跡候補行列と航跡候補の各々とに対応するコストからなるコスト配列を再生成するように指示する。多次元相関決定手段120は、航跡候補行列とコスト配列とからLagrange緩和法を用いて、N+1次元割当問題を2次元割当問題の繰り返しとして解くことにより、最適航跡組み合わせを抽出する。
(もっと読む)
レーダ装置
【課題】目標が複数存在し、目標の距離と角度のペアが不明な状況下でも、誤ったペアによる偽目標を排除し、正しいペアリング結果を出力可能なレーダ装置を得る。
【解決手段】距離・角度観測値を生成する距離・角度観測値検出部1と、複数の仮説を生成する仮設生成部4と、初期の距離・角度観測値を生成する初期状態量設定部5と、予測値と観測値との相関処理結果に基づいて、相関のとれた距離・角度観測値を選抜する相関処理部7と、観測値に基づいて予測値を算出する追尾フィルタ部8と、仮説の対数尤度を算出し、全サンプルの仮説の対数尤度の和およびサンプル数を算出する対数尤度算出部9と、サンプル数が所定の閾値以上である場合に仮説毎の対数尤度の和を出力するサンプル数判定部11と、信頼度が最大となる仮説に含まれる距離と角度のペアをペアリング結果として出力する最大信頼度仮説判定部12とを備える。
(もっと読む)
サブジェクトの位置を決定する方法およびシステム
本発明の一形態によれば、サブジェクトの位置決定方法が提供される。方法は、複数の受信機のうち第1のセットの受信機でサブジェクトに割り当てられている無線周波数識別タグから第1の信号を受信し、無線周波数識別タグには無線周波数識別タグIDが割り当てられており、複数の受信機のうち第2のセットの受信機で無線周波数識別タグから第2の信号を受信し、第2の信号は第1の信号とは異なり、第2のセットの受信機は第1のセットの受信機とは異なっており、第1の信号についての情報および第2の信号についての情報に基づいて位置スコアを演算し、第1の信号についての情報には第1の信号であることおよび第1のセットの受信機であることが含まれ、第2の信号についての情報には第2の信号であることおよび第2のセットの受信機であることが含まれており、位置スコアに基づいてサブジェクトの位置を決定する。 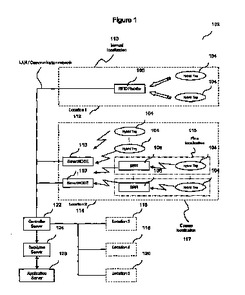 (もっと読む)
(もっと読む)
目標追尾装置、目標追尾方法、及び、プログラム
【課題】誤相関を低減することにより、目標を追尾するのに好適な目標追尾装置、目標追尾方法、及び、プログラムを提供する。
【解決手段】電波を発生する電波発生部と、前記電波を放射し、目標から前記電波の反射波を受信する電波送受信部と、前記反射波を画像信号に変換する信号処理部と、前記画像信号から前記目標を検出する目標検出部と、前記画像信号に基づき、前記目標を表示する表示部と、前記目標検出部が検出した検出結果に基づいて、前記目標を追尾するゲートを発生するゲート発生部と、前記ゲート内に前記目標が存在する場合、前記ゲート外の前記画像信号を分離する信号分離部と、を備え、前記目標検出部は、前記信号分離部が分離した信号に基づき、前記目標を検出する。
(もっと読む)
多目標追尾装置
【課題】追尾の難易度に応じてアルゴリズムの切り換えを行うことができる多目標追尾装置を得る。
【解決手段】前観測時刻でMHT追尾処理を実行する第1の条件、及び前観測時刻で追尾が困難であると判定する第2の条件を満たす場合は、センサ1からの複数のフレームに跨る観測値を用いて多次元の相関を取りながら、MFA処理で相関解を生成するMFA追尾処理部4と、前記第1及び第2の条件の何れかの条件を満たさない場合は、センサ1からの最新観測値と既存追尾航跡の2次元の相関を取り、複数の仮説を生成しながら新たな航跡を生成するMHT追尾処理部2と、MHT追尾処理実行中に、生成された仮説の状況から追尾が困難であるかどうかを判定するMHT仮説監視部3と、MFA追尾処理部4で生成された相関解をMHT追尾処理部2の仮説として置き換えるMHT仮説設定部5とを設けた。
(もっと読む)
レーダ装置
【課題】方向の観測値の信頼性が低下しやすい、互いに近接する複数の外部目標の位置と速度とを精度よく追尾する。
【解決手段】アンテナからの受信信号を信号処理して複数の外部目標の相対距離と相対速度とを算出するとともに、前記アンテナが放射するビームパターンのうち、一部が重なり合う隣接するビームパターンを組み合わせることで前記複数の外部目標の位置観測値と速度観測値とを取得して、これら位置観測値と速度観測値から前記複数の個別の外部目標毎の位置と速度の平滑値を算出する目標追尾フィルタと、互いに近接する前記複数の外部目標からクラスタを形成し、クラスタ内の外部目標に対して、前記目標追尾フィルタとは異なるゲートを設定し、このゲートによって前記外部目標の観測値との相関処理を行う追尾処理クラスタ内目標追尾フィルタとを備えた。
(もっと読む)
1 - 20 / 61
[ Back to top ]