
Fターム[5J070BB05]の内容
レーダ方式及びその細部 (42,132) | 追跡(追尾) (806) | 追跡一般 (468) | 速度追跡(ドプラ追跡) (30)
Fターム[5J070BB05]に分類される特許
1 - 20 / 30
推定装置及びコンピュータプログラム及び推定方法
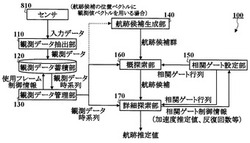
【課題】処理時間を低減しつつ目標航跡を精度良く抽出する。
【解決手段】航跡候補生成部140は、目標航跡を記述するパラメータのうちいくつかを固定した上でパラメータの候補を多数生成する。相関ゲート設定部150は、航跡候補生成部140が生成したパラメータ候補におけるいくつかの固定されたパラメータと目標の真のパラメータとの誤差を最大限考慮した相関ゲートを設定する。概探索部160は、航跡候補生成部140が生成したパラメータ候補と、観測データ管理部130が取り出した観測データとから、相関ゲート設定部150が設定した相関ゲートを用いてパラメータ候補の尤度を計算し、尤度が最大となるパラメータ候補を抽出する。詳細探索部170は、概探索部160が抽出したパラメータ候補を初期値として、尤度が大きくなる方向にパラメータを更新し、相関ゲートが小さくなるように更新して、尤度が最大となるパラメータを探索する。
(もっと読む)
レーダ装置

【課題】 PRF切換回数を必要以上に多くすることなく、エクリプスによる目標からの反射波の損失を少なくなるようにして、目標の追尾を常に行うことのできるレーダ装置を得る。
【解決手段】 受信ゲート内で位相が一定となる信号と受信ゲートの中心で位相が変わる信号を発生する位相変調発生器と、上記位相変調発生器の出力信号により位相変調を行う位相変調器と、位相変調器の出力信号を保持するデータ保持手段と、スペクトル解析手段の出力から誤差計算を行い誤差信号を出力する誤差計算手段と、スペクトル解析手段の出力から目標との相対速度を出力する速度計算手段と、PRFを切換える判断を行いPRF切換指令を出力するPRF切換手段によりエクリプスの影響を予測し、PRFを選択するように構成する。
(もっと読む)
レーダ装置
【課題】直下クラッタ、メインローブ・クラッタ及びサイドローブ・クラッタの影響を受けずに安定した追尾の維持、継続が可能となるレーダ装置を得る。
【解決手段】直下クラッタの発生領域と目標信号の検出位置がレンジ方向で近接していない送信信号のパルス繰り返し周期(PRI)を選択する直下クラッタ評価処理321と、メインローブ・クラッタの発生領域と目標信号の検出位置がドップラ周波数方向で近接していない送信信号のパルス繰り返し周期を選択するメインローブ・クラッタ評価処理323と、サイドローブ・クラッタの発生領域と目標信号の検出位置がレンジ方向及びドップラ周波数方向で近接していない送信信号のパルス繰り返し周期を選択するサイドローブ・クラッタ評価処理325とを含む信号処理器3を備える。
(もっと読む)
レーダ装置
【課題】安定した相関追尾が可能なレーダ装置を提供する。
【解決手段】FMCW方式のスイープ信号を送受信する送受信器20と、送受信器からの信号に基づき算出された目標の速度によって該目標を速度範囲毎にグルーピングし、速度範囲毎の速度ヒストグラムの度数に基づき自速度を抽出し、自速度を含む速度グループ内でレンジを分割し、分割レンジ毎にクロスレンジのヒストグラムを算出し、算出されたヒストグラムの度数が最大のクロスレンジ位置を算出し、分割レンジ毎に抽出された度数が最大のクロスレンジ位置を用いて曲線フィッティングして反射点の曲線を抽出する速度グルーピング部36と、速度グルーピング部によってグルーピングされた速度グループ毎に相関追尾を行う相関追尾部37を備える。
(もっと読む)
レーダ装置
【課題】クロスレンジプロフィールを用いた類別判定において、目標の観測条件(距離、速度、進行方向)によってクロスレンジ分解能が変化することにより、類別判定結果の信頼性が大きく変化するという運用上の課題がある。
【解決手段】追尾情報から得られた目標の観測条件と、所望のクロスレンジ分解能から、所望のクロスレンジ分解能を得るために必要となる目標観測時間を算出し、これに基づき捜索ビーム及び類別ビームのビームスケジューリングを行う。
所望のクロスレンジ分解能を得るために更に長い目標観測時間が必要な場合は、類別ビームを分割送信することによりクロスレンジ分解能を向上させ、目標の観測条件によらずクロスレンジ分解能を一定にすることにより、類別判定結果の信頼性を一定に保つ。
(もっと読む)
FMCWレーダセンサ、及び、周波数マッチングのための方法
本発明は、FMCWレーダセンサにおける周波数マッチングのための方法であって、レーダセンサにより測定された物体をそれぞれに表し、様々な変調ランプ上で獲得される複数の周波数が、物体の間隔dと速度vとの可能な組み合わせを表す軌跡(g1〜g4)としてd−v空間(26)内に示され、様々な変調ランプ上で測定される物体を識別するために、様々な変調ランプ上で獲得される周波数に対応する軌跡間の一致(T、S)が探索される、上記方法において、最初のステップでは、一致(T)の探索がd−v空間(26)の部分空間(40)に限定され、後続のステップでは、探索がd−v空間の他の範囲へ拡大されるとともに、最初のステップで見出された物体に対応する周波数が隠されることを特徴とする方法に関する。 (もっと読む)
車両速度計算装置及び車両速度計算方法及び車両速度計算プログラム
【課題】レーダの観測データから車両の速度を高精度で求める。
【解決手段】車両速度計算装置100において、車両検出部103は、合成開口レーダ(SAR)によって、道路が敷設された地域を観測し、その結果として得られたレーダ画像201から、道路の近傍に存在する車両を検出する。ドップラシフト量推定部104は、道路301の位置と車両検出部103が検出した車両のレーダ画像201における位置との間の距離に基づいてドップラシフト量を推定する。速度計算部105は、ドップラシフト量推定部104が推定したドップラシフト量を車両検出部103が検出した車両の速度へ換算する。
(もっと読む)
誘導装置
【課題】複数のバンドの周波数の電波を送出することにより小RCS目標の対処性能を向上させる際に、送受信機の大型化を抑えて飛しょう体への搭載が可能な誘導装置を提供する。
【解決手段】誘導装置は、局発信号及びIF信号を励振するとともに局発信号の周波数にIF信号の周波数を加算して得た周波数のハイバンド送信信号とIF信号の周波数と同じ周波数のローバンド送信信号とを生成する共通励振部と、目標で反射して戻ったハイバンド送信信号を受信して得たハイバンド受信信号を局発信号によりダウンコンバートするハイバンドフロントエンドと、ハイバンドフロントエンドから出力されたダウンコンバートされたハイバンド受信信号と目標で反射して戻ったローバンド送信信号を受信して得たローバンド受信信号とが入力される共通受信部と、を備えた。
(もっと読む)
目標追尾装置
【課題】複数のn次元角度センサと目標との交会角が小さな場合でも、追尾安定性を向上させた目標追尾装置を得る。
【解決手段】目標の追尾維持処理開始時の初期値算出にあたって、目標との仮説距離を用いた第1の追尾維持処理と、交会法により算出された距離を用いた第2の追尾維持処理とを並行して動作させ、それぞれの処理で目標航跡を取得しながら、それぞれの目標航跡に対する事後確率を算出し、この事後確率に基づいて2つの目標航跡を選択/統合した統合航跡を継続取得することによって目標の追尾を維持する。
(もっと読む)
レーダ信号処理装置とその目標判定方法
【課題】低S/N環境下においても目標を識別し距離や速度を特定することができるようにする。
【解決手段】目標11からの反射波はアンテナ1から取り込まれ、受信器2で受信される。受信された信号はA/D変換器3でデジタル信号に変換されて目標検出器4で信号処理されて、目標航跡の仮データが求められる。目標検出器4では、デジタル信号に変換された信号をフーリエ変換し、複数回分取り込んで、ハフ変換やTBDアルゴリズムなどの方法によって目標と思われる航跡を抽出し、これを目標航跡仮データとする。この目標航跡仮データは、観測毎の距離のデータ列および速度のデータ列であり、目標判定処理器5に送られる。この目標判定処理器5は、観測毎に得られる目標航跡仮データから目標の航跡を判定し、単一の目標と判定されたときはこの目標の航跡情報とすることで、真の目標航跡データを求める。
(もっと読む)
レーダ装置
【課題】従来のビート周波数の対応付け方法では、目標の探知状況がアップチャープ時とダウンチャープ時で異なりビート周波数のピーク数が合わない場合においては、ビート周波数の対応付けが正確に行えない状況が発生する。
【解決手段】FMCW信号を送信する送信手段1と、受信信号と送信信号とからビート信号を生成する受信手段2と、ビート信号のビート周波数分布を求めるビート周波数生成手段3と、ビート周波数の追尾処理を行うアップチャープ用ビート周波数追尾手段4とダウンチャープ用ビート周波数追尾手段5と、ビート周波数時系列データから目標の距離及び距離変化率を算出するアップチャープ用目標検出手段6とダウンチャープ用目標検出手段7とを設けた。
(もっと読む)
誘導装置
【課題】 自らは電波を放射せずにレーダなどの電波源からの電波を受信して、この受信信号に対して追尾する誘導装置において、継続的に電波を受信できるかどうかは電波源の挙動次第であり、目標が消失し追尾が継続できない場合がある。目標が消失した要因としては、電波源が周波数を変更し受信帯域幅外の周波数になった可能性や、レーダのスキャン周期の影響で受信電力が低下している可能性等が考えられるが、前者、後者を同時に捜索することが非常に困難である。
【解決手段】 SUM系受信帯域とDIF系受信帯域を別々に制御することで、異なる周波数帯域を同時に捜索することを可能とする。これにより、電波源からの電波放射状況の影響が軽減され捜索性能が向上するとともに、追尾時間が長くなることになるため、誘導性能の向上が可能となる。
(もっと読む)
誘導装置
【課題】 ドップラレーダを使用して目標を観測する誘導装置は、目標信号のドップラ周波数とアンテナメインローブによるクラッタ周波数が重なる領域において、メインローブクラッタ信号を誤検出する可能性がある。このため目標信号がメインローブクラッタ周波数範囲外から出てくる待ち受け処理をするが、待ち受け処理中は目標もしくは誘導装置を搭載した飛しょう体自身が機動をし、ビーム領域外とならない限り目標信号を検出することができない。
【解決手段】 誘導装置のクラッタ実測値を使用してメインローブクラッタ電力と広がりを算出し、別途算出した目標信号電力とドップラ周波数を比較して目標の前方もしくは、後方のエネルギロスの少ない方へ誘導弾が回り込むよう、加速度指令値を計算する。
(もっと読む)
目標追尾装置
【課題】速度推定値の精度が悪い場合でも追尾継続が可能な目標追尾装置を得る。
【解決手段】ドップラ速度変化率が閾値を超えるか否かを判断し、ドップラ速度変化率が閾値を超えない場合には、直進目標用フィルタを選択し、ドップラ速度変化率が閾値を超える場合には、旋回目標用フィルタを選択するとともに、この時点におけるヘディングの値をヘディング基準値に設定し、その後、前記旋回目標用フィルタを選択した場合に、判定保留期間が経過するまで旋回目標用モデルを選択し、判定保留期間中に、現フレームのヘディングと前記ヘディング基準値の差異であるヘディング変化が閾値を超えるか否かを判断し、ヘディング変化が閾値を超える場合には、判定保留期間が経過した以降も旋回目標用モデルを選択し続け、ヘディング変化が閾値を超えない場合には、判定保留期間が経過した以降は直進目標用モデルを選択する追尾処理部20Aを設けた。
(もっと読む)
不要追尾目標除去装置
【課題】本発明は不要な追尾目標の捕捉を防止する不要追尾目標除去装置を提供する。
【解決手段】レーダ機能に基づき追尾目標を追尾する追尾制御手段30に対し不要な追尾目標を除去する制御を行う不要追尾目標除去装置3Aである。追尾目標の追尾目標距離情報及び追尾目標方位情報と、レーダ設置位置の緯度経度情報に基づき追尾目標の緯度経度を算出する追尾目標位置情報算出手段62と、追尾目標位置情報を基点とする追尾目標周辺領域を生成する追尾目標周辺領域生成手段63と、電子図データを構成する図形構成要素の特徴をもとに、図形構成要素と追尾目標周辺領域との包含関係を判定し、追尾目標周辺領域内に図形構成要素が含まれると判定すると追尾中止命令を出力する包含関係判定制御手段を含む。
(もっと読む)
レーダ信号処理装置およびレーダ信号処理方法
【課題】レーダ装置はできるだけ多くの信号を、できるだけ短時間での処理が要求され、信号の要求精度を落とさずに高精度の高分解能処理の削減で負荷を削減する。
【解決手段】目標物からの反射波をアンテナで受信してA/D変換部でディジタル化し、時間フーリエ変換部でドップラー周波数次元に変換して目標物の相対速度を算出し、ドップラー周波数次元の信号に対しピーク検出部で受信レベルのピーク検出を行い距離ゲートまたは相対速度情報から信号の重要度を重要度判定部で判定して、データ並び替え部で重要度順に並び替え、この各信号と重要度を、異なる複数の高分解能処理方法における演算精度および所定数の信号の処理時間を処理方法との組合せ毎に格納されたデータベースと照合し、各信号と高分解能処理方法とをデータ割当て部で対応させ、高分解能処理部で角度または距離を算出する。
(もっと読む)
目標追尾装置及び目標追尾方法
【課題】ゲートが不必要に拡大するのを防ぎ、高速移動目標に対しても正確にゲート内に目標を捕捉できる目標追尾装置および目標追尾方法を得る。
【解決手段】本発明の追尾装置及び追尾方法は、北基準直交座標での目標運動における加速度ベクトルを駆動雑音とせずに、極座標での速度ベクトルのふらつきを駆動雑音としている。すなわち、平滑値ベクトルから速度ノルムと駆動雑音ベクトルの座標変換行列を算出し、その値と駆動雑音分散の設定値とから駆動雑音共分散行列を算出し、それを用いて追尾処理を行う。これにより、サンプリング間隔が大きい時にも、ゲートの極端な拡大を防ぐとともに、1サンプリング前の目標の速度成分を引用するゲート設定により、目標速度の大小に合わせた駆動雑音を設定し、目標速度に応じてゲートの広さを変化させ、最適なゲート設定を行うことが可能となる。
(もっと読む)
信号処理装置およびその方法
【課題】ESPRITによる信号処理だけで複数の候補値を算出しこれらから推定値を得ることで推定値の信頼性を高めた信号処理装置および方法を提供する。
【解決手段】所望のパラメータに関し、アレー状の複数の受信素子の各受信素子から得られる受信信号に対してESPRITによる信号処理により、共分散行列を演算し、算出された共分散行列を固定値と固有ベクトルに展開し、固有ベクトルに選択行列対を適用して得られた2つの行列の関係を最小二乗法で解き、最小二乗法の解から所望のパラメータの推定値の候補値を算出して出力する信号処理において、複数のサブアレー選択方法によりそれぞれに、固有ベクトルの複数の要素を各選択方法で異なるサブアレーに分割し、複数のサブアレー選択方法毎にそれぞれESPRITによる信号処理で所望のパラメータの推定値の候補値を算出し、算出された複数の候補値を組み合わせて推定値を判定する。
(もっと読む)
センサのバイアス誤差推定装置
【課題】バイアス誤差を、センサを中心とした直交座標系においてオイラー角で定義する場合、バイアス誤差推定方式で定式化した際に観測行列の階数が足りず、正則とならないため、3次元の位置の観測値だけではバイアス誤差を推定することができない。
【解決手段】センサで観測した3次元の観測値からX、Y、Z軸の回転角のうち、1軸バイアス誤差補正器5により、1軸の回転角について取り得る範囲で複数パターン想定し、あらかじめ1軸の回転角のみ補正した観測値を求め、この補正後の観測値を用いて、2軸バイアス誤差補正器7により残りの2軸の回転角を推定する。2軸バイアス誤差補正器群8で推定した2軸の回転角と、1軸バイアス誤差補正器5で補正した1軸の回転角を1つの組合せとして、その中から最適なX、Y、Z軸の回転角を選択する推定値評価器9を設けて、バイアス誤差を推定するようにした。
(もっと読む)
ネットワークレーダシステム、レーダおよび中央制御装置
【課題】或るレーダが受け持った追尾目標を他のレーダが探知するのを防ぎ、システム全体としての探知性能の劣化を抑える。
【解決手段】確立除外情報抽出部24により、各レーダの探知覆域を既追尾目標が通過するかどうかを判定して、探知覆域を通過する場合に限り確立除外情報を作成してその探知覆域を形成するレーダに対して通知するようにし、このことによって、対応するレーダの追尾処理部14の追尾航跡の確立処理において、通知された確立除外情報と相関のとれる航跡に対しては確立させないようにしている。
(もっと読む)
1 - 20 / 30
[ Back to top ]