
Fターム[5J070BB06]の内容
レーダ方式及びその細部 (42,132) | 追跡(追尾) (806) | 追跡一般 (468) | 予測追跡 (175)
Fターム[5J070BB06]に分類される特許
81 - 100 / 175
精測進入レーダシステム
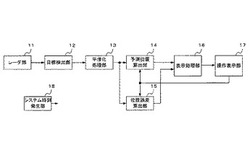
【課題】着陸進入中の航空機に対してタイムリーで効率的な誘導管制を行なうとともに、その誘導管制の業務負荷を軽減できる精測進入レーダシステムを得る。
【解決手段】くり返し取得される航空機の観測位置を、予測フィルタを用いて平滑化するとともに、所定時間幅経過後の予測位置を算出し、これら最新の平滑化位置と予測位置とをシンボル化して表示する。また、予測位置に対しては、その位置誤差として予測位置に対する標準偏差を算出し、これを航空機の確率的な存在範囲としてシンボル化された予測位置の周囲に2次元に重ね合わせて表示する。さらに、位置誤差を算出する際には、その誤差要因としてレーダの観測精度のみならず、予測フィルタにおける処理誤差特性も考慮に加える。
(もっと読む)
物体検出装置

【課題】レーダを用いた物体検出において物体を高精度に検出する物体検出装置を提供することを課題とする。
【解決手段】物体検出装置1であって、物体の位置を検出するレーダ検出手段2と、レーダ検出手段2で今回検出された検出点をグルーピングするグルーピング手段3と、前回の複数のグループに基づいてグルーピング手段3で今回グルーピングされたグループを複数のグループに分割する分割手段3と、各グループの検出点を用いて物体を検出する物体検出手段3とを備えることを特徴とする。
(もっと読む)
物体検出装置
【課題】レーダを用いた物体検出において物体を高精度に検出する物体検出装置を提供することを課題とする。
【解決手段】物体検出装置1であって、物体の位置を検出するレーダ検出手段2と、レーダ検出手段で今回検出された各検出点をグルーピングするグルーピング手段3と、前回のグループに基づいてグルーピング手段3で今回グルーピングされた複数のグループを統合する統合手段3と、各グループの検出点を用いて物体を検出する物体検出手段3とを備えることを特徴とする。
(もっと読む)
車両の障害物検知装置
【課題】車両前方の物体が障害物であるか否かを早期に且つ的確に判定する。
【解決手段】物体検出センサ4が車両1に対する物体の位置情報を検出する度に、その位置情報をECU5が逐次記憶する。物体検出センサ4が物体を検知すると、ECU5は、車速センサ2が検出した車速及び回転角速度センサ3が検出したヨーレイトから車両1の予想進路を推定するとともに、その物体の過去の位置情報が記憶されているか否かを判定し、物体の過去の位置情報が記憶されていると判定した場合、過去の位置情報が示す物体の過去の位置と推定した予想進路とに基づいて、物体が車両1と衝突する可能性がある障害物であるか否かを判定する。
(もっと読む)
目標追尾装置及び目標観測システム及び目標追尾方法及びプログラム
【課題】複数の目標が重なって一つの目標として観測されたのち重なった目標が離れて再び複数の目標として観測された場合でも、正しく目標を同定できる相関処理を実現する。
【解決手段】重複判定装置115は、複数の目標が重なって一つの目標として観測されたか否かを判定する。目標間距離算出装置121は、複数の目標が重なる直前に観測された位置の間の距離(重複前距離)を算出する。目標間距離ゲート設定装置131は、重複前距離に基づいて分離判定範囲を設定する。分離判定装置132は、分離判定範囲内に新たな目標が観測された場合に、重なった目標が離れて再び複数の目標として観測されたと判定する。分離妄評移動距離算出装置133は、分離目標移動距離を算出する。分離目標判定装置135は、分離目標移動距離に基づいて重なった目標が離れて観測された複数の目標を同定する。追尾装置150は、分離目標判定装置135が同定した目標を追尾する。
(もっと読む)
レーダ装置、及び物標検出方法
【課題】レーダ波の周波数変調を行わないスキャンのときに物標の速度が急変したとしても、次回のスキャンで実際に検出される物標の距離が乖離しないような距離の予測を行う。
【解決手段】過去の検出物標の距離と速度とに基づき現在の距離を予測する物標距離予測手段と、予測された距離に対応する物標が検出されないときは、予測された距離に対応する物標が検出された回数をカウントし、前記カウントの値が規定数に達したときに、前記検出された物標の距離を出力する連続性判定手段と、周波数変調を施さない第2のレーダ波を送受信した場合には、予測された距離と、そのスキャンで検出された速度とに対応する物標が検出されたものと推定する物標推定手段を有するレーダ装置により、次回のスキャンで検出される距離と乖離しない距離を予測することが可能となる。
(もっと読む)
航空機通信システムとそのアンテナ指向制御方法
【課題】ロストした航空機の位置を予測して通信アンテナを航空機に指向させ、通信を再開させる。
【解決手段】衛星基地局S2から得られる位置情報、航空管制システム20で得られる位置情報、飛行計画書から得られる位置情報を入手し、直接通信が途絶えたとき、優先度判定を行って精度の高い順序で位置情報を予測アルゴリズムA2による予測処理を実行する。この予測アルゴリズムA2では、航空機Tが時刻t1の位置Aにて速度vで移動している状態でロストしたとすると、時刻t2の位置を予測し、さらに現在時刻tとの伝送時間差とアンテナ動作時間を演算し、時間差分の位置ずれを予測位置Bに反映させ、この予測位置情報を基に、通信アンテナ装置11の航空機Tの予測位置Bの方向を計算し(A3)、この計算結果から通信アンテナ装置11の指向方向(方位・仰角)を駆動制御して航空機Tの予測位置Bの方向にビームを形成する。
(もっと読む)
物体検出装置
【課題】追尾範囲を適切に設定して物体の検出精度の向上が図れる物体検出装置を提供すること。
【解決手段】物体検知を行うレーダ3〜5を備えて構成され、レーダ3〜5により検知された物体の追尾範囲を物体が検知される方向に応じて設定する。これにより、物体の移動状態に応じて追尾範囲の向きを設定することが可能となる。このため、物体の移動状態に適した追尾範囲を設定でき、物体のロストなどを低減でき、適切なトラッキングが行える。従って、物体の検出精度を高めることができる。
(もっと読む)
制御対象認識装置
【課題】 自車の走行の障害とならない停止物を対象とする不必要な車両制御が行われるのを防止する。
【解決手段】 反射レベルが閾値以上で前回まで制御対象であると認識されていたゲートが、今回制御対象であると認識されなくなったとき、そのゲートを実際に検知されたものと見なして外挿手段が所定回数(5回)を限度に外挿(○参照)するものにおいて、ゲートが静止物であり、かつゲートの前回(タイム4)検知時の反射レベルおよび今回(タイム5)検知時の反射レベルから予測した次回(タイム6)検知時の反射レベルが検知閾値未満(□参照)である場合には、外挿手段が外挿を行う回数の限度を前記5回から2回に減少させるので、自車の接近に伴って反射レベルが急激に低下して制御対象でないと推定されるゲートの外挿回数を減らし、該ゲートに対する不必要な車両制御が行われるのを防止して運転者の違和感を解消することができる。
(もっと読む)
車両用物体検知装置
【課題】 自車の走行の障害とならない停止物を対象とする不必要な車両制御が行われるのを防止する。
【解決手段】 制御対象物体認識手段M5により前回まで制御対象であると認識されていた物体が、今回制御対象であると認識されなくなったとき、相対関係予測手段M3により予測された物体を実際に検知されたものと見なして外挿手段M6が所定回数を限度に外挿する際に、その物体が静止物であって、かつ略等間隔で連続する連続性を有する場合には、外挿手段M6が外挿を行う回数の限度を例えば5回から2回に減少させるので、トンネルの天井に一定間隔で設けられた照明灯のような静止物に対する外挿回数を減らし、自車が接触する虞のない静止物に対する不必要な車両制御が行われるのを防止して運転者の違和感を解消することができる。
(もっと読む)
追尾装置
【課題】追尾の初期段階から予測誤差を少なくして、安定した目標の追尾を行う。
【解決手段】新たに観測された目標に対して使用するフィルタゲインの初期値を設定する初期化ゲイン設定部6と、観測値に基づく目標の追尾が初期段階である場合に、観測値に基づき目標が到達すると予測される位置を示す第1予測値を算出するとともに、観測値に基づき第1平滑値を算出し、第1平滑値を含む相関のある目標に対する航跡情報を生成する初期化処理部4aと、観測値に基づく目標の追尾が初期段階でない場合に、目標の過去の航跡情報に基づき目標が到達すると予測される位置を示す第2予測値を算出するとともに、第1予測値又は第2予測値と観測値とに基づき第2平滑値を算出し、第2平滑値を含む相関のある目標に対する航跡情報を生成するフィルタリング処理部3と、第1予測値又は第2予測値と観測値とに基づき目標の相関を判断する相関処理部1とを備える。
(もっと読む)
目標信号検出装置及び目標信号検出方法
【課題】目標の位置を予測する閾値を制御することにより、目標を安定して検出することができる目標信号検出装置を得ることにある。
【解決手段】送受波器は、水中に音波を発信し、目標からの反響音を受信処理する。信号処理部は、受信信号が有する複数の要素を抽出し、抽出した特徴素を複数の時系列信号として出力する。信号検出部は、時系列信号の目標らしき信号を抽出し、特徴素を算出する。目標検出部は、時系列信号ごとに目標信号を統合して位置を算出する。目標類別部は、統合された各特徴素に対して重み付けを行い、統合された目標信号の目標らしさの程度を示す確信度を算出する。目標追尾部は、目標の予測位置を算出し、実際に検出した目標との相関を実施する。目標検出最適化処理部は、目標の予測位置を利用し、信号検出部を最適化する。
(もっと読む)
不要追尾目標除去装置
【課題】本発明は不要な追尾目標の捕捉を防止する不要追尾目標除去装置を提供する。
【解決手段】レーダ機能に基づき追尾目標を追尾する追尾制御手段30に対し不要な追尾目標を除去する制御を行う不要追尾目標除去装置3Aである。追尾目標の追尾目標距離情報及び追尾目標方位情報と、レーダ設置位置の緯度経度情報に基づき追尾目標の緯度経度を算出する追尾目標位置情報算出手段62と、追尾目標位置情報を基点とする追尾目標周辺領域を生成する追尾目標周辺領域生成手段63と、電子図データを構成する図形構成要素の特徴をもとに、図形構成要素と追尾目標周辺領域との包含関係を判定し、追尾目標周辺領域内に図形構成要素が含まれると判定すると追尾中止命令を出力する包含関係判定制御手段を含む。
(もっと読む)
標定レーダ装置
【課題】位置標定に対する精度を維持しつつ、より広い範囲を監視して目標の位置標定を行なうことのできる標定レーダ装置を得る。
【解決手段】監視対象領域を低仰角の初期探知領域と高仰角の進路観測領域に分割し、初期探知領域に目標探知のためのビーム幕を形成しておき、この領域で探知した目標については、その捕捉情報を取得するとともに、進路観測領域に進入後の進路を予測する。そして、この目標が進路観測領域に進入後は、予測した進路の方向に指向させたレーダビームにより目標の捕捉情報を継続して取得し、その後、これら一連の捕捉情報に基づいて目標の発射位置の標定を行なう。
(もっと読む)
不審船監視装置
【課題】コスト的及び人的負担が少なく、確実に監視エリアに侵入した不審船を検出することができるようにする。
【解決手段】監視エリアにある船舶に搭載されるレーダ装置から発信されるレーダ波を受信し、受信したレーダ波の受信波形のパターンデータを、そのレーダ波を発信するレーダ装置を搭載する船舶の属性データと関連付けて予めデータベース38に格納し、レーダ逆探装置16によって受信されたレーダ波の受信波形のパターンデータを取得し、該取得したパターンデータとデータベース38に格納された各パターンデータとの比較を行ってマッチングしているか否かの判定を行い、取得したパターンデータとデータベース38に格納された全パターンデータがマッチングしなかったときに、そのレーダ波を発信するレーダ装置を搭載する船舶を不審船と判定する。
(もっと読む)
距離算出装置
【課題】パルスレーダによる測距方式において距離精度を向上させる。
【解決手段】目標をとらえるサンプルゲート処理部2のゲート位置の中心を境に前後に隣り合う進みゲート及び遅れゲートを設定する進みゲート処理部1及び遅れゲート処理部3を備える。信号レベル判定器4及び6は、進みゲート処理部1及び遅れゲート処理部3それぞれから出力されるFFT処理結果をもとに各ゲート内の信号レベルを判定する。距離誤差算出器7は、進みゲート及び遅れゲートにおける信号レベルの判定結果をもとに距離誤差を算出する。サンプルゲート制御器8は、上記算出された距離誤差に基づいてサンプルゲートの位置を制御する。
(もっと読む)
状態推定装置及び状態推定方法
【課題】推定処理の途中で、必要なモデルを判別して、不要なモデルのカルマンフィルタの処理結果がフィルタ全体の推定精度に与える悪影響を抑制することができるようにする。
【解決手段】統合処理部10がカルマンフィルタ処理部3−1〜3−3から出力された各モデルの状態ベクトル推定値の更新値xk|k(j)ハット及び推定誤差共分散行列の更新値Pk|k(j)のうち、モデル構成判定部8により使用すると判別されたモデルの状態ベクトル推定値の更新値xk|k(j)ハット及び推定誤差共分散行列の更新値Pk|k(j)を、モデル確率計算部6により計算されたモデル確率μk(j)に応じた統合加重で統合する。
(もっと読む)
目標観測レーダ装置及び目標追尾方法
【課題】平行移動による観測予報値の補正に代わる補正方式を提供する。
【解決手段】観測した目標物の軌道データに基づいて観測予報値を作成する観測計画作成処理部と、前記観測計画作成処理部からの前記観測予報値に基づいて、目標物を観測した軌道データに含まれるデータ誤差と、目標物固有の軌道の不安定要素とを含んだ誤差値を考慮した2以上の軌道モデルを求め、前記目標物を初期捕捉した観測データに近似した軌道データを前記軌道データから抽出し、前記抽出した軌道データの観測予報値を目標物の追尾観測データとして出力する観測実行計画処理部と、を有する。
(もっと読む)
目標追尾装置及び目標追尾方法
【課題】ゲートが不必要に拡大するのを防ぎ、高速移動目標に対しても正確にゲート内に目標を捕捉できる目標追尾装置および目標追尾方法を得る。
【解決手段】本発明の追尾装置及び追尾方法は、北基準直交座標での目標運動における加速度ベクトルを駆動雑音とせずに、極座標での速度ベクトルのふらつきを駆動雑音としている。すなわち、平滑値ベクトルから速度ノルムと駆動雑音ベクトルの座標変換行列を算出し、その値と駆動雑音分散の設定値とから駆動雑音共分散行列を算出し、それを用いて追尾処理を行う。これにより、サンプリング間隔が大きい時にも、ゲートの極端な拡大を防ぐとともに、1サンプリング前の目標の速度成分を引用するゲート設定により、目標速度の大小に合わせた駆動雑音を設定し、目標速度に応じてゲートの広さを変化させ、最適なゲート設定を行うことが可能となる。
(もっと読む)
目標追尾装置、目標追尾方法、目標追尾プログラム
【課題】同一目標から複数の検出位置を得るセンサシステムにおいて、検出位置の重心位置精度劣化を低減するとともに、航跡の高精度化を目的とする。
【解決手段】追尾処理部108は、観測精度を示す観測精度パラメータが設定された観測モデルを用いて、検出装置200から取得した検出情報に基づき目標の追尾を行う。クラスタリング算出部104は、検出装置200から取得した検出情報が示す目標と認められる位置の集合を示すプロット集合を算出する。サイズ算出部110は、プロット集合の大きさであるプロット集合サイズを算出する。パラメータ制御部112は、プロット集合サイズの大きさに基づき、追尾処理部108が用いる観測モデルに設定された観測精度パラメータが示す観測精度を制御する。
(もっと読む)
81 - 100 / 175
[ Back to top ]