
Fターム[5J070BB07]の内容
レーダ方式及びその細部 (42,132) | 追跡(追尾) (806) | 追跡一般 (468) | 目標捜索、捕捉 (25)
Fターム[5J070BB07]の下位に属するFターム
再捕捉 (6)
Fターム[5J070BB07]に分類される特許
1 - 19 / 19
管制装置、航空機、及び管制方法
【課題】目標に対する射撃を行うための火器管制を効率良く行うことを目的とする。
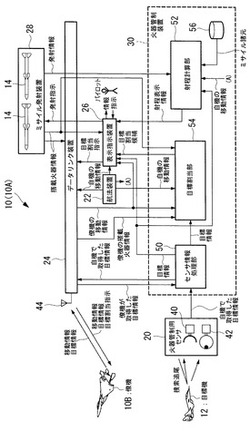
【解決手段】航空機10は、データリンク装置24によって、僚機10Bから僚機10Bの移動情報及び僚機10Bが捜索追尾によって取得した目標情報を受信し、自機の移動情報及び自機が捜索追尾によって取得した目標情報を僚機10Bへ送信する。そして、航空機10は、目標割当部54によって、データリンク装置24で受信した僚機10Bの移動情報及び目標情報、並びに自機の移動情報及び自機の捜索追尾によって取得した目標情報に基づいて、自機及び僚機10Bに対して、射撃の対象となる目標機12又は捜索追尾の対象となる目標機12を割り当てる割当処理を行い、割当結果である目標割当指示を僚機10Bへデータリンク装置24によって送信する。
(もっと読む)
レーダ装置

【課題】直下クラッタ、メインローブ・クラッタ及びサイドローブ・クラッタの影響を受けずに安定した追尾の維持、継続が可能となるレーダ装置を得る。
【解決手段】直下クラッタの発生領域と目標信号の検出位置がレンジ方向で近接していない送信信号のパルス繰り返し周期(PRI)を選択する直下クラッタ評価処理321と、メインローブ・クラッタの発生領域と目標信号の検出位置がドップラ周波数方向で近接していない送信信号のパルス繰り返し周期を選択するメインローブ・クラッタ評価処理323と、サイドローブ・クラッタの発生領域と目標信号の検出位置がレンジ方向及びドップラ周波数方向で近接していない送信信号のパルス繰り返し周期を選択するサイドローブ・クラッタ評価処理325とを含む信号処理器3を備える。
(もっと読む)
パッシブ型飛しょう体飛しょう制御装置および制御方法
【課題】TDOAとFDOAを観測し、目標の位置をパッシブに測位するパッシブ型飛しょう体において、測位精度の向上を図る。
【解決手段】既知の送信源から照射され目標に当たって散乱した散乱波と、既知の送信源から直接到来する直接波との両方を受信することでTDOAおよびFDOAを観測し、自らは電波を放射することなく目標を測位して自らの飛しょう経路を目標へと向かうように制御する飛しょう制御部(14)を備えたパッシブ型飛しょう体飛しょう制御装置であって、自機、送信源、目標の幾何学的配置からGDOPを演算するとともに、ISO−TDOAとISO−FDOAの直交度を推定し、現在の飛しょう体による測位誤差の定量的な判断指標を生成するGDOP演算部(18)をさらに備える。
(もっと読む)
自動追尾レーダ装置および自動追尾方法
【課題】雑音帯域幅の狭い追尾ループでの追尾を可能とし、追尾限界となるS/N比を改善することが可能な自動追尾レーダ装置を提供する。
【解決手段】ロケットやスペースデブリ等の飛翔体を自動追尾する自動追尾レーダ装置として、前記飛翔体を初期捕捉して、自動追尾モードに移行した以降において、アンテナ指向追尾系ループのアンテナ指向誤差検出器16、積分器17および距離追尾系ループの距離誤差検出器23、積分器24にて検出されたアンテナ指向誤差および距離誤差に基づき、アンテナ追尾ループフィルタ18および距離追尾ループフィルタ25それぞれにて生成されるアンテナ指向角度の制御情報および受信タイミングの制御情報を、予見情報(角速度、各加速度)加算器27および予見情報(速度、加速度)加算器26にて、前記飛翔体の軌道予測値、他のレーダ装置の追跡情報または過去の追跡データに基づく予測値である予見情報を用いてさらに補正する。
(もっと読む)
レーダ装置
【課題】障害発生時の運用中断の期間を短縮して可用性を向上させたレーダ装置を得る。
【解決手段】分割した覆域毎に対応させて設けられた複数の空中線を有するレーダ装置において、同一に構成された複数個の単位空中線を有する主空中線部と、この主空中線部から離間して設置された回動可能な1個の単位空中線を有する副空中線部とを用いて、レーダ波を送受信する空中線部を構成する。そして、主空中線部内の単位空中線の動作を監視し、動作異常が検出された場合には、副空中線部を、この動作異常となった単位空中線の代替として、直前までの動作状況を引き継ぎつつ、その動作を継続させるように制御する。
(もっと読む)
レーダ装置
【課題】物標に関する情報の算出を精度良く行う。
【解決手段】レーダ装置は、送受信手段と、物標検出手段とを備える。送受信手段は、レーダ波を送信するとともに、物標により反射されたレーダ波を逐次受信する。物標検出手段は、送受信手段が受信した受信信号のスペクトルにおけるピークに基づいて物標を検出し、当該ピークから物標を検出できない場合に物標を外挿状態と判断する。また、物標検出手段は、スペクトルにおけるピークの状態に基づいて外挿状態の種類を決定する。
(もっと読む)
レーダ装置、及びターゲットの速度進行方向推定方法
【課題】特に、ターゲットの速度が遅いときに、精度の高いターゲットの速度、及び進行方向を推定できるレーダ装置を提供する。
【解決手段】ターゲットの速度、及び進行方向を推定して衝突予測を行うレーダ装置であって、所定の時間一定の周期でターゲットを捕捉するターゲット捕捉部と、ターゲット捕捉部が捕捉した捕捉点に基づいて、ターゲットの速度、及び進行方向を推定して衝突を予測する衝突予測部と、衝突予測部の推定したターゲットの速度が所定速度以下である場合、推定したターゲットの速度に応じてターゲットを捕捉する時間を増加させて捕捉点の数を増加させるターゲット捕捉制御部とを備え、衝突予測部は、前記ターゲット捕捉制御部が捕捉点の数を増加させた後の全ての捕捉点に基づいて、ターゲットの速度、及び進行方向を推定して衝突を予測する。
(もっと読む)
アンテナ装置及びレーダ装置
【課題】 装置規模の増大や性能劣化を抑制しつつ複数系統のレーダ用フェーズドアレイアンテナを備えたアンテナ装置を得る。
【解決手段】 本発明によるアンテナ装置は、同一開口100に各アンテナのアンテナ素子31a及び31bが2次元に配列されて開口100を共用する第1及び第2のレーダ用フェーズドアレイアンテナを含み、第1のレーダ用フェーズドアレイアンテナ(A系)のアンテナ素子31aは開口100に素子間引きにより間引いて配置され、第2のレーダ用フェーズドアレイアンテナ(B系)のアンテナ素子31bは開口100の上記素子間引きにより間引かれた位置に配置されている。
(もっと読む)
監視装置
【構成】管理品無線通信タグ(200)および管理者無線通信タグ(300)に基づいて管理対象品(100)の監視を行う監視装置であって、管理品無線通信タグに基づいて管理対象品の存在を検出する第1検出手段(16、34)、管理者無線通信タグに基づいて前記管理者の存在を検出する第2検出手段(16,34)、管理品無線通信タグからの電波に基づいて管理対象品の位置の変化量に応じた値を特定する特定手段(34e)、変化量に応じて時間を計測する計時手段(27)、第1検出手段の検出結果、前記第2検出手段の検出結果、前記特定手段の特定結果、および前記計時手段の計時結果の少なくとも1つに応じて警報を出力する制御手段(16、36、28e)を備える。
【効果】状況に応じて的確な警報を出力することができる。
(もっと読む)
アダプティブアレイアンテナ装置
【課題】大開口面のアレイアンテナを使用した場合にアダプティブビームフォーミング処理の演算量を軽減できる。
【解決手段】サブアレイごとに対応して設けられ、サブアレイを構成する各素子アンテナによるそれぞれの受信信号の全てに対してデジタルビームフォーミング処理を実施してサブアレイごとの合成信号を算出する複数のサブアレイビーム形成部と、複数のサブアレイビーム形成部からそれぞれ算出される合成信号の全てに対してデジタルビームフォーミング処理を実施してアレイアンテナとしての合成信号を算出するトータルアレイビーム形成部を備える。
(もっと読む)
誘導装置
【課題】 ドップラレーダを使用して目標を観測する誘導装置は、目標信号のドップラ周波数とアンテナメインローブによるクラッタ周波数が重なる領域において、メインローブクラッタ信号を誤検出する可能性がある。このため目標信号がメインローブクラッタ周波数範囲外から出てくる待ち受け処理をするが、待ち受け処理中は目標もしくは誘導装置を搭載した飛しょう体自身が機動をし、ビーム領域外とならない限り目標信号を検出することができない。
【解決手段】 誘導装置のクラッタ実測値を使用してメインローブクラッタ電力と広がりを算出し、別途算出した目標信号電力とドップラ周波数を比較して目標の前方もしくは、後方のエネルギロスの少ない方へ誘導弾が回り込むよう、加速度指令値を計算する。
(もっと読む)
ロケット追尾レーダ装置
【課題】ロケットから分離した小物体や爆破によるロケットの破片を探知、追尾し、落下範囲を予測可能にする。
【解決手段】分離・爆破判定部がロケットの分離、爆破の状態を表す信号を基に分離、爆破を判定し、閾値制御部が破片データベースの対象の破片情報に基づいて推測したサイズの破片を目標として検出するように目標検出部の検出閾値を変更し、追尾制御部が対象の破片情報に基づいて破片のまとまりを目標として一つの追尾ビームにより追尾できるように追尾部の追尾フィルタの変更し、追尾部は対象の破片情報に基づいて追尾フィルタを変更して追尾処理を行うと共に、破片のまとまりに対する追尾ビームを形成するよう送受信装置を制御し、落下範囲予測部は破片のまとまりに対応した追尾結果データおよび対象の破片情報に基づいて破片の予測落下範囲を算出する。
(もっと読む)
飛翔体の誘導方法及び誘導システム
【課題】センサ部の設置構造の簡素化、小型化および低価格化を実現することができるとともに、終末誘導の実行の確実性及び信頼性を向上できる飛翔体の誘導方法及び誘導システムを提供する。
【解決手段】飛翔体2の機体3に対するセンサ部16の姿勢を調整できるようにセンサ部16を飛翔体の機体3に固定可能な構成としておく。飛翔体2の発射前に、中間誘導によって飛翔体2が目標1近辺に到達したときにセンサ部16の視野範囲に目標1が入るように飛翔体2の機体3に対するセンサ部16の姿勢を調整して固定しておく。
(もっと読む)
RF技術を用いた物体の追跡における低減された減衰のための方法およびシステム
無線周波数(RF)ベースの物体の識別、追跡、および位置特定のための方法およびシステム。本方法およびシステムは、より低い周波数範囲のVHFで狭帯域幅信号を使用し、伝搬損失およびRF位置特定信号の精度の低下を最小限に抑える。信号は、マスタユニットからタグまで送信される。信号移動時間が記録され、マスタとタグとの間の距離が計算される。本方法およびシステムは、VHF帯域を使用することによって、より長距離のRF信号の透過および正確さの向上を達成することができる。デジタル信号処理およびソフトウェア規定無線技術が使用される。無線によって送受信される実際の波形は、ソフトウェアによって定められる。マスタユニットおよびタグの役割は、逆にすることができる。 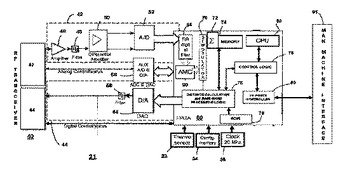 (もっと読む)
(もっと読む)
標定レーダ装置
【課題】 機動性を損なうことなく全方位を監視し位置標定を行なうことの可能な標定レーダ装置を得る。
【解決手段】 標定レーダ装置の空中線部11を、互いに異なる仰角にペンシルビームを有する2つのアンテナ111及び112で構成するとともに、これら2つのアンテナを、方位方向の指向方位が互いに反対となるように配置する。そして、この空中線部11を駆動部12により方位方向に高速回転駆動することによって、異なる2つの仰角の全周方向に目標を捕捉するためのビーム幕を形成する。
(もっと読む)
レーダ装置
【課題】 捜索と追尾を同時に行うレーダ装置において、追尾目標をクラッタやブランキングの影響なしに追尾可能なPRIを含んだPRIの組合せにて捜索を行うことにより、捜索処理に必要なPRIの組合せにて、精度良く追尾を行う。
【解決手段】 ビーム指向方向制御手段1からのビーム指向方向に応じて捜索に必要なPRIの組合せを計算するPRI計算手段2と、計算されたPRIの組合せにて電波の送受信を行う探知手段5と、目標追尾に対応したPRIによる受信信号7を選択する追尾情報選択手段13と、この受信信号7から目標検出を行う追尾処理手段14と、追尾処理手段14の処理結果から追尾処理を行う追尾情報検出手段12を設けた。
(もっと読む)
海上における対象物の捜索方法及びシステム並びに対象物の捜索方法を実行する記録媒体
【課題】捜索物及び捜索領域の状況に応じて捜索を確実にすることができる海上捜索システム及び装置並びにこの捜索を実行するプログラムを提供する。
【解決手段】海上に浮遊又は漂流又は走行している対象物を捜索する捜索方法であって、浮遊又は漂流又は走行している対象物の当該海域の海象条件を入力する入力装置103と、前記入力された海象条件及び対象物の大きさに応じた探知率変化を、予め記憶装置105に記憶されたデータベース106から読み出す読出し装置101と、前記読み出された探知率変化から対象物の認識確率を算出する算出装置102と、前記算出装置で算出された捜索モードを出力する出力装置104と、を備え、海象条件により捜索条件を策定する。
(もっと読む)
追尾レーダ装置
【課題】初探知目標の数が増大しても、捜索性能の劣化を防止でき、また、追尾移行時間が長くなることを防止できる追尾レーダ装置を提供する。
【解決手段】指定方向の空間に送信された送信波の反射波を受信する受信機4と、受信機からの受信信号に基づき目標を検出する目標検出部5と、目標検出部で検出された目標を表す目標検出情報に基づいて、目標を追尾するための追尾情報および初めて検出された目標である初探知目標を表す初探知情報を生成して出力する追尾制御部6と、追尾制御部から出力される追尾情報および初探知情報に基づいてビーム制御を行うレーダ制御部7とを備え、レーダ制御部は、追尾制御部から出力される初探知情報によって表される初探知目標が真目標であるかどうかを確認する検定処理として、検定専用の検定ビームによる検定処理または検定と捜索とが兼用される捜索ビームによる検定処理の何れかを選択する検定方式選択器12を備える。
(もっと読む)
データ処理装置
【課題】 処理負荷が絶えず変化する環境の中で、信号処理の規模にふさわしい回路規模を有する、小型軽量化されたデータ処理装置を得る。
【解決手段】 捜索処理及び追尾処理の2種類の信号処理に対応してデータ処理部10及びデータ処理部20を設け、それぞれに単一の信号処理として、データ処理部10には捜索処理を、またデータ処理部20には追尾処理を割り当てるとともに、いずれのデータ処理部も、複数のDSPを用いて信号処理の負荷に応じた規模に構成する。
(もっと読む)
1 - 19 / 19
[ Back to top ]