
Fターム[5J070BB13]の内容
レーダ方式及びその細部 (42,132) | 追跡(追尾) (806) | 追跡の特徴 (317) | 転移防止 (30)
Fターム[5J070BB13]に分類される特許
1 - 20 / 30
エコー信号処理装置、レーダ装置、エコー信号処理プログラム及びエコー信号処理方法
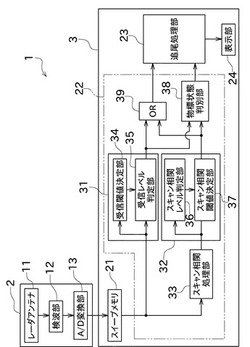
【課題】簡単な構成で、物標追尾等の処理で用いることができる有用な情報を取得することが可能な信号処理装置を提供する。
【解決手段】信号処理装置3は、スキャン相関処理部33と、物標状態判別部38と、を備える。スキャン相関処理部33は、第1の時刻に受信された第1エコー信号のレベルと、前記第1の時刻よりも前の第2の時刻に受信された第2エコー信号のレベルと、に基づいて、第1の時刻におけるスキャン相関信号レベルを出力する。物標状態判別部38は、第1エコー信号のレベルと、第1の時刻におけるスキャン相関信号レベルと、に基づいて、第1エコー信号に対応した物標の状態を判別する。
(もっと読む)
追尾レーダ装置

【課題】地図情報を用いて不要反射波からの目標誤検出を低減することにより、追尾維持率の改善を図る。
【解決手段】検出処理部31は、地図情報記憶装置50から現在観測中の地域の地図情報を読み出し、当該地図情報から追尾目標の反射波と誤認識する不要反射波を発生する領域を追尾対象外として区分けするプロット検出用フィルタ(52,54,55)を作成し、当該プロット検出用フィルタ(52,54,55)に基づいて追尾対象外の領域を除いた領域からの反射波についてのプロットのみを検出する。
(もっと読む)
目標追尾装置
【課題】 従来、目標の諸元のみから予測時刻における目標の位置等を予測しているために、追随遅れを生じたり、観測された目標の位置と予測位置の差異が大きくなり、安定追尾をすることが困難となる場合があった。
【解決手段】 目標の移動先となる目的地及び予測経路を目的地の優先度、目標の運動諸元を元に推定し、その目的地に向けた移動経路を等速円運動や比例航法により予測することにより、予測位置と観測される目標との位置差を減少させ、追随遅れの解消や安定した追尾維持や追尾精度向上を実現する。
(もっと読む)
気象現象の自動追尾方法及び自動追尾システム
【課題】積乱雲を含む雷雲等の気象現象をRHI観測により確実且つ自動的に追尾する。
【解決手段】自動追尾システム10において、解析用PC22は、気象ドップラレーダ23が観測した気象現象のエコー強度データに基づくエコー頂高度及び鉛直積算雨水量のプロダクトを用いて、注目したいエコーを追尾対象として自動的に決定し、決定した注目エコーに応じた気象現象に対してRHI観測を行うときの方位角を自動的に算出する。
(もっと読む)
目標追尾装置
【課題】本発明は、正解航跡候補を含めた航跡候補をその状況に適切に生成保持することができ、探知状況によらず高い追尾精度を維持することができる目標追尾装置を提供する。
【解決手段】多次元相関行列生成部121は、センサ200の観測値のうち最新の観測値に対応する最新の観測フレームから新しい順に所定の指定フレーム数の観測フレームを選択する。多次元相関行列生成部121は、その選択した観測フレームに対応する航跡候補と、その航跡候補についてのコストと含む多次元相関行列を生成する。多次元相関行列生成部121は、多次元相関行列の生成に際して、全航跡候補と相関する観測値が存在しない観測フレームである探知抜けフレームを多次元相関行列の観測フレームから除外し、探知抜けフレームよりも前の観測フレームを選択する。
(もっと読む)
レーダ装置
【課題】ビート周波数を入力する追尾フィルタと、ペアリング後の観測値を入力とする追尾フィルタを併用して用いることで、アップチャープとダウンチャープ時のビート周波数のピーク数が異なる場合においても目標の追尾精度を向上することができ、誤ペアを除去することができるレーダ装置を得る。
【解決手段】FMCW信号を受信して、受信信号と送信信号とからビート信号のピークを検出し、ビート周波数の対応付け及び測角処理を実施して目標情報を生成する信号処理器1と、ビート周波数を入力して目標の位置と速度を更新するビート周波数追尾フィルタ2と、目標の位置と速度の観測値を入力して目標の位置と速度を更新するペア観測値用追尾フィルタ3と、前記両追尾フィルタの追尾航跡同士を統合もしくは選択する統合選択器4と、システム航跡メモリ5と、異常値判定器6とを設けた。
(もっと読む)
レーダ制御装置、該装置に用いられるレーダ監視覆域設定方法及びレーダ監視覆域設定プログラム
【課題】限定された数のレーダを用いて多数の目標を探知する場合に、目標の出現が予想される地点が効率的に含まれるようにレーダの監視覆域を設定するレーダ制御装置を提供する。
【解決手段】監視覆域候補計算手段20により、目標予想点情報fcに対してレーダR1 ,R2 毎に階層的クラスタリングが行われ、クラスタリング結果のクラスタからレーダR1 ,R2 の監視覆域の組合せの候補caが算出される。監視覆域組合せ計算手段30により、監視覆域の組合せの候補caの中から、一方のレーダで探知され、かつ他方のレーダで探知されない目標予想点が探知される監視覆域から優先的に漸次決定することにより、レーダR1 ,R2 の監視覆域が算出される。最急降下法計算手段40により、監視覆域組合せ計算手段30で算出された全てのレーダの監視覆域に対応するパラメータを初期値として、最急降下法を用いて評価関数の値が最大となる監視覆域のパラメータmaが算出される。
(もっと読む)
レーダ装置、目標同化判定処理方法およびプログラム
【課題】非同期に走査を行う1次レーダおよび2次レーダにおいて捕捉した目標の同化判定処理を容易に行うこと。
【解決手段】1次レーダ10と、この1次レーダ10と走査速度が非同期の2次レーダ11とを備えるレーダ装置1において、1次レーダ10が捕捉した目標Tの位置における目標Tの移動速度および移動方向の情報に基づき1次レーダ10が目標Tを捕捉していない期間における目標Tの位置を推定する航跡追尾部12と、2次レーダ11が目標tを捕捉した時刻に対応する航跡追尾部12が推定した目標Tの位置が目標tの位置と所定の関係にあるときに、目標tと航跡追尾部12が位置を推定する基となった目標Tとが同一のものであると判定する目標同化判定部としてのデータ処理部13とを備える。
(もっと読む)
レーダ装置、レーダ装置の信号処理方法及び、車両制御システム
【課題】方位ばらつきが大きい場合であっても、物標のトラッキングを精度良く行なうことができるレーダ装置を提供する。
【解決手段】互いに間隔が異なる三本以上の素子アンテナ15のうち、任意の二本の素子アンテナ対で受信された反射波の位相差から物標の方位候補を二つ算出する方位算出部と、方位算出部で算出された二つの方位候補の夫々についてトラキング処理を行なうトラッキング処理部と、誤差が小さい方の方位候補によるトラッキング処理の結果に基づいて物標情報を出力する物標情報出力部として機能するCPU11を備えているレーダ装置10。
(もっと読む)
物体検知装置
【課題】 物体検知手段で検知した物体の自車に対する相対位置を速やかに、かつ精度良く算出する。
【解決手段】 相対位置予測手段M3が相対関係算出手段M1bにより算出された物体の今回検知時における相対位置および相対速に基づいて、複数の経過時間後における相対位置を予測し、相対位置出力手段M4が相対関係算出手段M1bの算出結果に基づいて前記予測された複数の予測位置の何れか一つを今回検知時点における相対位置として出力する。今回検知時における相対位置に基づいて車両制御を行う場合に比べて、予測した将来の相対位置に基づいて車両制御を行うことでタイムラグを最小限に抑えることができ、しかも予測した複数の相対位置のうちの何れか一つを選択して出力するので、タイムラグの減少および出力する相対位置の精度をバランス良く両立させることができる。
(もっと読む)
追尾装置及びプログラム及び追尾方法
【課題】複数の異なるセンサ装置が目標を観測した結果に基づいて、目標を追尾する。
【解決手段】トラック記憶部181は、複数のセンサ装置それぞれが観測した目標に関する情報を表わす複数のトラックデータを記憶する。トラック記憶部181が記憶したトラックデータが更新された場合、優先度算出部141は、更新されたトラックデータの優先度を算出する。共通データ更新部144は、優先度算出部141が算出した優先度が高い場合に、更新されたトラックデータを、共通データ記憶部182に共通データとして記憶させる。
(もっと読む)
物体検出装置
【課題】レーダを用いた物体検出において物体を高精度に検出する物体検出装置を提供することを課題とする。
【解決手段】物体検出装置1であって、物体の位置を検出するレーダ検出手段2と、レーダ検出手段2で今回検出された検出点をグルーピングするグルーピング手段3と、前回の複数のグループに基づいてグルーピング手段3で今回グルーピングされたグループを複数のグループに分割する分割手段3と、各グループの検出点を用いて物体を検出する物体検出手段3とを備えることを特徴とする。
(もっと読む)
物体検出装置
【課題】レーダを用いた物体検出において物体を高精度に検出する物体検出装置を提供することを課題とする。
【解決手段】物体検出装置1であって、物体の位置を検出するレーダ検出手段2と、レーダ検出手段で今回検出された各検出点をグルーピングするグルーピング手段3と、前回のグループに基づいてグルーピング手段3で今回グルーピングされた複数のグループを統合する統合手段3と、各グループの検出点を用いて物体を検出する物体検出手段3とを備えることを特徴とする。
(もっと読む)
レーダシステム
【課題】目標を安定して追尾することが可能なレーダシステムを提供する。
【解決手段】Xバンドのレーダ映像中に偽像又はクラッタが存在し、さらに、各ARPA装置8a、8bが同一の目標をそれぞれ追尾している場合に、追尾部17bの目標追尾部26は、Sバンドの目標の位置を指示機16aに送信し、指示機16aの追尾位置比較部44は、受信した指示機16bからの目標の位置と、追尾部17aの目標追尾部26からのXバンドの目標の位置との差分を求め、前記差分が所定の閾値を上回るときに前記差分を追尾部17aの目標追尾部26に出力する。該目標追尾部26は、前記差分を用いて目標の位置を補正する。
(もっと読む)
車載用レーダ装置
【課題】 間違った目標捕捉(乗り移り)の発生を回避できる車載用レーダ装置を提供する。
【解決手段】 自車(10)前方にパルス状の電磁波(12)を周期的に照射し、その反射波(13)に基づいて、少なくとも目標の水平方向の幅を測定する車載用レーダ装置(11)において、前記反射波の先回または数回前の強さと今回の強さとを比較する比較手段(17)と、今回の反射波の強さが急減少し、且つ、前記目標の水平方向の幅が一般的車両の水平方向の幅を超えたときに間違った目標であると判定する第1判定手段(17)とを備える。または、今回の反射波の強さが急増大したときに間違った目標であると判定する第2判定手段(17)を備える。
(もっと読む)
物体検出装置
【課題】追尾範囲を適切に設定して物体の検出精度の向上が図れる物体検出装置を提供すること。
【解決手段】物体検知を行うレーダ3〜5を備えて構成され、レーダ3〜5により検知された物体の追尾範囲を物体が検知される方向に応じて設定する。これにより、物体の移動状態に応じて追尾範囲の向きを設定することが可能となる。このため、物体の移動状態に適した追尾範囲を設定でき、物体のロストなどを低減でき、適切なトラッキングが行える。従って、物体の検出精度を高めることができる。
(もっと読む)
移動物体検出装置および自律移動物体
【課題】混雑環境下での移動物体の精度よいトラッキングが行える移動物体検出装置および移動ロボットを提供すること。
【解決手段】空間の混雑度を測定してトラッキングに利用するもので、方向成分では、混雑度が低ければレーザレンジセンサの計測値を重視し、混雑度が高くなると画像処理結果を重視したセンサフュージョンを行い、得られた移動物体推定方向に対してレーザレンジセンサの計測結果から距離を求める。
(もっと読む)
目標追尾装置、目標追尾方法、目標追尾プログラム
【課題】同一目標から複数の検出位置を得るセンサシステムにおいて、検出位置の重心位置精度劣化を低減するとともに、航跡の高精度化を目的とする。
【解決手段】追尾処理部108は、観測精度を示す観測精度パラメータが設定された観測モデルを用いて、検出装置200から取得した検出情報に基づき目標の追尾を行う。クラスタリング算出部104は、検出装置200から取得した検出情報が示す目標と認められる位置の集合を示すプロット集合を算出する。サイズ算出部110は、プロット集合の大きさであるプロット集合サイズを算出する。パラメータ制御部112は、プロット集合サイズの大きさに基づき、追尾処理部108が用いる観測モデルに設定された観測精度パラメータが示す観測精度を制御する。
(もっと読む)
目標追尾装置、目標追尾プログラム及び目標追尾方法
【課題】高分解能センサにより同一目標から複数の検出位置を得るセンサシステムにおいて、検出位置の重心位置精度劣化の低減を図るとともに、目標の航跡の高精度化を目的とする。
【解決手段】検出情報決定部120は、複数の検出装置から取得した検出情報の内、1つの検出装置から取得した検出情報に基づき目標の追尾を行うか、あるいは2つ以上の検出装置から取得した検出情報に基づき目標の追尾を行うかを所定の条件に基づき選択する。また、検出情報決定部120は、選択した結果に基づき、目標の追尾に使用する検出情報を決定する。追尾処理部140は、決定された検出情報に基づき目標を追尾する。
(もっと読む)
電子走査式精測レーダ装置および目標追尾方法
【課題】追尾目標の予測位置の算出精度を向上させ、かつ、信頼性が高い電子走査式精測レーダ装置を提供する。
【解決手段】捜索周期内の更新レートを擬似的に2倍に上昇させることによって、1つの目標に対して当該目標の位置および速度を検出するための追尾1−1と追尾1−2との2つの追尾を割り当てて、追尾1−1と前記追尾1−2とにより検出された当該目標の最新の位置および速度に基づいて、次走査時の予測位置を算出する。また、追尾1−1と追尾1−2との2つの追尾のうち、いずれかの追尾にコーストが発生した場合、もう一方の追尾に基づいて予測位置を算出する。追尾の対象とする目標として、最終着陸進入時の目標をレーダ表示部により選択指定することにより、当該目標の予測位置の算出を距離のみとし、高低角をグライドパス(GP)上、方位角をコースライン(CL)上に固定して、予測位置の算出を行う処理に切り替える機能を有する。
(もっと読む)
1 - 20 / 30
[ Back to top ]