
Fターム[5J070BB15]の内容
レーダ方式及びその細部 (42,132) | 追跡(追尾) (806) | 追跡の特徴 (317) | 複数目標の追跡 (82)
Fターム[5J070BB15]に分類される特許
1 - 20 / 82
追尾装置
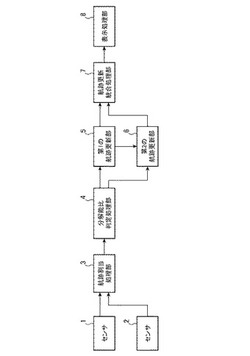
【課題】高分解能センサ及び低分解能センサによる航跡に対して正確な割り当てを行うことで、真の目標数分の航跡を生成する。
【解決手段】目標を観測して航跡を生成するセンサ1と、センサ1より低分解能であり、目標を観測して航跡を生成するセンサ2と、センサ1,2により生成された航跡を1対1で割り当てる航跡割当処理部3と、割当結果に応じて、センサ1により生成された航跡を、センサ2により生成された対応する航跡に基づいて更新する第1の航跡更新部5と、割当結果に応じて、センサ1により生成された未割当ての航跡を、センサ2により生成された複数の航跡に基づいて更新する第2の航跡更新部6と、センサ1,2の分解能比に基づいて、第1,2の航跡更新部5,6の動作を制御する分解能比判定処理部4と、更新された航跡を統合する航跡更新統合処理部7とを備えた。
(もっと読む)
追尾装置

【課題】高い追尾性能を得ることができ、しかも、多目標を追尾する場合であっても処理負荷を低減することができる追尾装置を提供する。
【解決手段】座標系を指定する座標系制御部6と、入力された観測値の座標系を、座標系制御部から指定された座標系に座標変換する観測値用座標変換部1aと、座標系制御部から指定された座標系において、観測値用座標変換部で座標変換することにより得られた観測値と追尾している目標の航跡との相関をとる相関処理部2aと、相関処理部で相関がとられた結果に対して、座標系制御部によって指定された座標系において、フィルタリング処理を実施するフィルタリング処理部4aとを備え、該観測値を取得した機器の動作モードである捜索モード又は追尾モードに応じて、観測値用座標変換部、相関処理部およびフィルタリング処理部で使用する座標系を該追尾装置の運用中に切り換え制御する座標系制御部から構成される。
(もっと読む)
ビーム管理装置及びこれを備えたレーダ装置並びにビーム管理方法及びプログラム
【課題】 特定のAPAAに割り当てられた追尾目標が増加した場合でも、他のAPAAの捜索性能を保ちながら、追尾目標に対する追尾ビームの照射頻度を維持する。
【解決手段】 ビーム管理装置10は、予め定められた捜索ビーム及び追尾ビームの照射タイミングからなる基本照射スケジュールaを記憶する基本照射スケジュール記憶手段11と、APAAに割り当てられた追尾目標bを入力する追尾目標入力手段12と、割り当てられた追尾目標bの数が増加し、予め定められた追尾ビームの数を越えた場合に、捜索ビームの照射に要する時間を短縮し、余った時間を追尾ビームの照射に利用するように照射スケジュールcを算出する照射スケジュール算出手段13と、を備えたことを特徴とする。
(もっと読む)
目標物検出装置及びプログラム
【課題】自車の周囲に複数の目標物が存在している場合でも、各目標物と自車との位置関係を容易に認識することができる目標物検出装置を提供する。
【解決手段】自車の位置を検出するGPS受信機8と、目標物の位置情報を記憶するデータベース19と、GPS受信機で検出された位置情報と、データベースに格納された目標物の位置情報とに基づき、表示対象の目標物を抽出する制御部18と、その制御部により抽出された目標物の位置情報と、自車位置情報とを表示する表示部5と、を備える。表示部には、複数の目標物の位置と車両の現在位置とが、2次平面上に配置されるターゲットアイコンにより報知するように構成した。
(もっと読む)
多目標追尾装置、多目標追尾方法、および多目標追尾プログラム
【課題】追尾ビームを効率的に追尾目標に照射し追尾精度を有効に向上させる。
【解決手段】電子走査アンテナ部101で取得された信号に基づいて、一のビーム照射により検知可能な異なる追尾目標を追尾目標グループとして決定する追尾目標グループ算出部110と、追尾目標グループに含まれる異なる追尾目標間の相互位置関係に応じて追尾用のビームの照射スケジュールおよび照射領域を示すビームパラメータを算出する、追尾ビームパラメータ算出部106と、算出されたビームパラメータに基づき電子走査アンテナ部101によるビーム照射動作の起動スケジュールを決定し、これに基づき電子走査アンテナ部におけるビーム照射動作を制御するアンテナ制御部109を備えた。
(もっと読む)
航空機位置測定システム、受信局、データ量削減方法およびプログラム
【課題】通信コストの低減と中央局の負荷の低減とを実現する。
【解決手段】複数の種類の信号のそれぞれを航空機へ向けて送信する送信局と、複数の種類の信号のそれぞれに対する複数の種類の応答信号のそれぞれを航空機から受信し、解読処理して測定用データを生成し、生成した測定用データに受信時刻情報を付与して送信する複数の受信局と、複数の測定用データを受信し、それらに付与された複数の受信時刻情報と、複数の受信局のそれぞれの位置情報とに基づいて航空機の位置を測定する中央局とを有する航空機位置測定システムにおいて、送信局は、中央局にて決定された時刻に基づいた時刻に複数の種類の信号のそれぞれを送信し、複数の受信局のそれぞれは、所定の種類の信号を送信する時刻として中央局にて決定された時刻に基づいて時間帯を設定し、所定の種類の信号に対する応答信号を上記の時間帯以外の時刻に受信した場合、当該受信した応答信号を破棄する。
(もっと読む)
レーダ装置
【課題】航空機と船舶等、速度が大きく異なる目標を同時に監視する際に、自動追尾開始時における誤追尾による目標表示を抑制したレーダ装置を得る。
【解決手段】追尾演算部17でのスライディングウィンドウ処理中に行われる、今回のスキャンと直前のスキャンとでの目標の相関の有無の判定において、相関有りと判定された回数をスキャンの進行に沿ってカウントアップし、このカウント値を相関・連結成功回数として、目標の表示用の追尾情報としての目標レポートに含めて操作表示部18に送出する。一方、複数の操作表示部18a〜18cにおいては、この相関・連結成功回数に対して、監視対象に合わせた最適なしきい値kdspがそれぞれに設定されており、受けとった目標レポートの中から、このしきい値kdspを超えた相関・連結成功回数を有するものを表示対象の目標レポートとして選択し、その目標を画面上にシンボル表示する。
(もっと読む)
エコー信号処理装置、レーダ装置、エコー信号処理プログラム及びエコー信号処理方法
【課題】簡単な構成で、物標追尾等の処理で用いることができる有用な情報を取得することが可能な信号処理装置を提供する。
【解決手段】信号処理装置3は、スキャン相関処理部33と、物標状態判別部38と、を備える。スキャン相関処理部33は、第1の時刻に受信された第1エコー信号のレベルと、前記第1の時刻よりも前の第2の時刻に受信された第2エコー信号のレベルと、に基づいて、第1の時刻におけるスキャン相関信号レベルを出力する。物標状態判別部38は、第1エコー信号のレベルと、第1の時刻におけるスキャン相関信号レベルと、に基づいて、第1エコー信号に対応した物標の状態を判別する。
(もっと読む)
目標追尾装置、目標追尾方法、及びプログラム
【課題】センサを有効活用して多くの目標を追尾可能とする。
【解決手段】目標追尾手段10は、センサ装置61、62の観測値から、目標の探知や、目標の状態を推定する。センサ状態管理手段20は、センサ装置61、62の状態を管理する。目標軌道予測手段30は、目標の状態から、目標の将来位置を予測する。センサ割当・方位変更計算手段40は、センサの状態と目標の将来位置とから、ネットワークの経路探索を行うことにより、センサ割当スケジュールと方位変更スケジュールとを算出する。センサ制御装置50は、センサの状態、目標の将来位置、センサ割当スケジュール、及びセンサ方位変更スケジュールから、目標追尾と方位変更とを指示する。センサ装置61、62は、センサ制御装置50からの指示に従って、目標追尾と方位変更とを実行する。
(もっと読む)
多目標追尾装置
【課題】早期にかつ正確に目標航跡を確立させる多目標追尾装置を得る。
【解決手段】サンプリング時刻毎の観測値数の履歴から目標数の仮説を立て、仮説の信頼度を計算することにより目標数を推定する目標数推定部3と、当該信頼度により目標数を決定する目標数確定判定部4と、決定された目標数に応じて多目標相関決定追尾処理部7の仮航跡の候補を抽出し、当該候補の最新の平滑値の尤度を過去数サンプリング時刻分の観測値に対して計算し、最も尤度が大きい仮航跡を選択して航跡を確立する航跡確立再判定部5とを備え、多目標相関決定追尾処理と並行して目標数推定を行って、分離目標の存在が確認されたら、多目標相関決定追尾処理で生成された仮航跡群から最も確度の高い航跡を抽出して確立させることによって、早期にかつ正確に目標航跡を確立させる。
(もっと読む)
目標追尾装置
【課題】本発明は、正解航跡候補を含めた航跡候補をその状況に適切に生成保持することができ、探知状況によらず高い追尾精度を維持することができる目標追尾装置を提供する。
【解決手段】多次元相関行列生成部121は、センサ200の観測値のうち最新の観測値に対応する最新の観測フレームから新しい順に所定の指定フレーム数の観測フレームを選択する。多次元相関行列生成部121は、その選択した観測フレームに対応する航跡候補と、その航跡候補についてのコストと含む多次元相関行列を生成する。多次元相関行列生成部121は、多次元相関行列の生成に際して、全航跡候補と相関する観測値が存在しない観測フレームである探知抜けフレームを多次元相関行列の観測フレームから除外し、探知抜けフレームよりも前の観測フレームを選択する。
(もっと読む)
目標追尾装置
【課題】必要最小限のネットワーク通信容量で、各センサにおける送信制御または各センサを管理する管理サーバによる送信要求制御を行うことを可能にし、ネットワーク通信容量の低減を図った目標追尾装置を提供する。
【解決手段】センサ側からセンサ観測情報を集約した再追尾センサ航跡をネットワークに流すことにより、センサ観測情報を全て出力する従来方式に比べネットワークに流すデータ量を低減させる。センサ側において、送信判定処理部1107により、自律的に自センサの再追尾センサ航跡が融合航跡の航跡精度に寄与するか否かによりネットワークに送信するか否かの送信判定を行い、寄与する場合のみ、再追尾センサ航跡を伝送することにより、必要最小限のネットワーク通信容量で、融合航跡の追尾精度を確保する。
(もっと読む)
レーダ装置
【課題】ビート周波数を入力する追尾フィルタと、ペアリング後の観測値を入力とする追尾フィルタを併用して用いることで、アップチャープとダウンチャープ時のビート周波数のピーク数が異なる場合においても目標の追尾精度を向上することができ、誤ペアを除去することができるレーダ装置を得る。
【解決手段】FMCW信号を受信して、受信信号と送信信号とからビート信号のピークを検出し、ビート周波数の対応付け及び測角処理を実施して目標情報を生成する信号処理器1と、ビート周波数を入力して目標の位置と速度を更新するビート周波数追尾フィルタ2と、目標の位置と速度の観測値を入力して目標の位置と速度を更新するペア観測値用追尾フィルタ3と、前記両追尾フィルタの追尾航跡同士を統合もしくは選択する統合選択器4と、システム航跡メモリ5と、異常値判定器6とを設けた。
(もっと読む)
レーダ制御装置、該装置に用いられるレーダ監視覆域設定方法及びレーダ監視覆域設定プログラム
【課題】限定された数のレーダを用いて多数の目標を探知する場合に、目標の出現が予想される地点が効率的に含まれるようにレーダの監視覆域を設定するレーダ制御装置を提供する。
【解決手段】監視覆域候補計算手段20により、目標予想点情報fcに対してレーダR1 ,R2 毎に階層的クラスタリングが行われ、クラスタリング結果のクラスタからレーダR1 ,R2 の監視覆域の組合せの候補caが算出される。監視覆域組合せ計算手段30により、監視覆域の組合せの候補caの中から、一方のレーダで探知され、かつ他方のレーダで探知されない目標予想点が探知される監視覆域から優先的に漸次決定することにより、レーダR1 ,R2 の監視覆域が算出される。最急降下法計算手段40により、監視覆域組合せ計算手段30で算出された全てのレーダの監視覆域に対応するパラメータを初期値として、最急降下法を用いて評価関数の値が最大となる監視覆域のパラメータmaが算出される。
(もっと読む)
目標追尾装置
【課題】複数のn次元角度センサと目標との交会角が小さな場合でも、追尾安定性を向上させた目標追尾装置を得る。
【解決手段】目標の追尾維持処理開始時の初期値算出にあたって、目標との仮説距離を用いた第1の追尾維持処理と、交会法により算出された距離を用いた第2の追尾維持処理とを並行して動作させ、それぞれの処理で目標航跡を取得しながら、それぞれの目標航跡に対する事後確率を算出し、この事後確率に基づいて2つの目標航跡を選択/統合した統合航跡を継続取得することによって目標の追尾を維持する。
(もっと読む)
疑似目標除去装置および移動体自動識別装置
【目的】本発明は、目標からレーダに到来した受信波を処理し、実質的に同じ目標による重複した反射に起因して識別される複数の目標を一本化する疑似目標除去装置と、搭載された移動体の識別情報に併せて上記一本化の拠り所となる情報を無線伝送路を介して外部に通知する移動体自動識別装置とに関し、ハードウェアの構成が大幅に変更されることなく、目標の識別精度を高め、かつ安定に維持することを目的とする。
【解決手段】目標が位置する領域を識別する領域識別手段と、レーダが受信した受信波で示される目標の内、前記領域に位置する目標を一本化し、1つの目標として検出する目標検出手段とを備える。
(もっと読む)
レーダシステム
【課題】単体で方位の異なる複数目標の同時観測を行い、各目標の高分解能画像を取得できるレーダシステムおよび信号処理方法を提供する。
【解決手段】航空機11が観測目標4を追尾し画像化するシステムにおいて、ビーム12を次々に切替えながらLPRF以上のパルスを送信する。すなわち、現状では送信した後ずっと目標方向を見ていたビーム12を、他方位の観測目標にも向けて観測を行う。ISAR画像解析において、本当に必要なのは観測目標4からの反射波だけであるので、受信ゲート14を開くタイミングを制御することで、受信ゲート14を従来の1目標あたりのPRI17よりも十分に小さくすることができる。このように、ビーム制御機能とタイミング制御機能を付加することで、多方位の複数の目標を同時に観測することができる。
(もっと読む)
自動車において観測対象物体を検出する方法
【課題】 観測対象物体とノイズ、固定観測対象物体と移動観測対象物体、および互いに近接し合った観測対象物体同士を容易に区別することができる、自動車における観測対象物体を検出する方法を提供する。
【解決手段】 この方法は、与えられたサイクル数にわたって、自動車の移動量に基づいて、自動車と相対的な、少なくとも1つの観測対象点の位置を補正するステップと、少なくとも1つの観測対象点から開始して、第1の与えられた特性を満たす、隣接する観測対象点とともに一次グループを形成するステップと、第2の与えられた特性に基づいて、一次グループが同質的であるか否かを検証するステップと、与えられたサイクル数にわたって、自動車と相対的に、単一の観測対象物体に対応して構成されていると判断されるグループの位置を計算するステップとを含んでいる。
(もっと読む)
目標追尾装置
【課題】高分解能のレーダセンサによる観測情報の時系列データに基づいて、目標の位置、速度と同時に目標の長さを推定する際に、目標の長さを安定的に推定する目標追尾装置を提供する。
【解決手段】目標の位置、速度を推定する追尾フィルタである位置・速度推定部210と共に、目標の長さを推定する追尾フィルタである目標長さ推定部220を備える。位置・速度推定部210と目標長さ推定部220の間では、目標の位置、速度の各成分の平滑値と目標長さの平滑値を互いに相関させながら、目標の位置、速度と同時に目標の長さを推定する。
(もっと読む)
航跡割当装置
【課題】多スタート局所探索においてMFA問題の最適解探索を精度良く効率的に行うことのできる航跡割当装置を得る。
【解決手段】観測値情報取得部1と、観測値情報格納部2と、航跡候補生成部3と、航跡候補格納部4と、初期解生成部5と、最良解格納部6と、新規解生成部7と、新規解格納部8と、最良解更新部9と、ビルディングブロック候補情報格納部10と、ビルディングブロック判定部11と、ビルディングブロック情報格納部12と、終了判定部13と、探索結果出力部14とを備えている。新規解生成部7は、ビルディングブロックと判定された構成要素が必ず含まれるように新規解を生成する。最良解更新部9は、多スタート局所探索時にK個の最良解のうちのL個以上の最良解に同じ構成要素が含まれる場合に、当該構成要素をビルディングブロック候補と判定して登録する。
(もっと読む)
1 - 20 / 82
[ Back to top ]