
Fターム[5J070BB30]の内容
レーダ方式及びその細部 (42,132) | 追跡(追尾) (806) | その他 (17)
Fターム[5J070BB30]に分類される特許
1 - 17 / 17
エコー信号処理装置、レーダ装置、エコー信号処理プログラム及びエコー信号処理方法
【課題】簡単な構成で、物標追尾等の処理で用いることができる有用な情報を取得することが可能な信号処理装置を提供する。
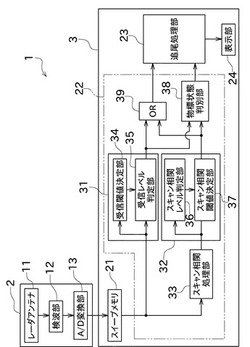
【解決手段】信号処理装置3は、スキャン相関処理部33と、物標状態判別部38と、を備える。スキャン相関処理部33は、第1の時刻に受信された第1エコー信号のレベルと、前記第1の時刻よりも前の第2の時刻に受信された第2エコー信号のレベルと、に基づいて、第1の時刻におけるスキャン相関信号レベルを出力する。物標状態判別部38は、第1エコー信号のレベルと、第1の時刻におけるスキャン相関信号レベルと、に基づいて、第1エコー信号に対応した物標の状態を判別する。
(もっと読む)
目標追尾装置

【課題】 従来、目標の諸元のみから予測時刻における目標の位置等を予測しているために、追随遅れを生じたり、観測された目標の位置と予測位置の差異が大きくなり、安定追尾をすることが困難となる場合があった。
【解決手段】 目標の移動先となる目的地及び予測経路を目的地の優先度、目標の運動諸元を元に推定し、その目的地に向けた移動経路を等速円運動や比例航法により予測することにより、予測位置と観測される目標との位置差を減少させ、追随遅れの解消や安定した追尾維持や追尾精度向上を実現する。
(もっと読む)
追尾装置
【課題】追尾の初期段階から予測誤差を少なくして、安定した目標の追尾を行う。
【解決手段】新たに観測された目標に対して使用するフィルタゲインの初期値を設定する初期化ゲイン設定部6と、観測値に基づく目標の追尾が初期段階である場合に、観測値に基づき目標が到達すると予測される位置を示す第1予測値を算出するとともに、観測値に基づき第1平滑値を算出し、第1平滑値を含む相関のある目標に対する航跡情報を生成する初期化処理部4aと、観測値に基づく目標の追尾が初期段階でない場合に、目標の過去の航跡情報に基づき目標が到達すると予測される位置を示す第2予測値を算出するとともに、第1予測値又は第2予測値と観測値とに基づき第2平滑値を算出し、第2平滑値を含む相関のある目標に対する航跡情報を生成するフィルタリング処理部3と、第1予測値又は第2予測値と観測値とに基づき目標の相関を判断する相関処理部1とを備える。
(もっと読む)
センサ移動計画システム
【課題】全ターゲットについて総合的に誤差を小さくするのに適した移動方向を算出できるセンサ移動計画システムを得る。
【解決手段】センサ管理部2は、ターゲットからの信号を受信したセンサから受信波形を獲得する受信波形獲得機能25と、受信波形の観測時刻におけるセンサの位置を獲得する位置情報獲得機能24と、2つのセンサの受信波形を照合してセンサペアのターゲットまでの距離差及び相対速度差を求める受信波照合機能26と、前記距離差及び相対速度差を満たす、ターゲットの観測位置及び観測速度を算出する整合算出機能27とを有し、ターゲット管理部1は、ターゲットの観測位置及び観測速度から将来の時刻におけるターゲットの推定位置及び推定速度を算出する推定機能13を有し、センサ行動算出部3は、各センサについて、位置及び速度誤差改善ベクトルを総合した誤差改善ベクトルを算出し、次の時刻におけるセンサの位置を決定する改善方向決定機能31とを有する。
(もっと読む)
目標類別装置
【課題】特徴量の信頼性の動的な変動を考慮することで、より高精度な区間値ファジィ推論方式による目標類別を可能とする目標類別装置を得る。
【解決手段】目標観測手段101により類別対象の目標が有する特徴量を得て、特徴量と特徴の度合いを表す入力ファジィ区間値とを関連付けたメンバシップ関数106と、メンバシップ関数106の区間の幅として定義できる特徴の曖昧さを特徴量から信頼性算出処理部108により算出された信頼性係数とを用いて、区間値ファジィ化処理部102により目標観測手段101によって得られた特徴量のファジィ化を行い、入力ファジィ区間値を得て、これから推論処理部103により目標種類の確からしさを表す出力ファジィ区間値を算出し、非ファジィ化処理部104によって算出された出力ファジィ区間値から目標種類を確定し、表示装置105に表示する。
(もっと読む)
追尾割当装置
【課題】複数ターゲットの追尾を複数センサに割当てる場合に、高速に最適割当を実現できる追尾割当装置を得る。
【解決手段】ターゲットDB13と、ターゲット想定軌道束を算出するターゲット想定軌道束算出機能11と、監視要求をターゲットDBに記憶させる監視要求記録機能12とを有するターゲット管理部10と、センサDB24と、割当可能数推移DB25と、既割当スケジュールを記憶する既割当スケジュールDB26と、割当可能数推移を算出する割当可能数推移算出機能21と、センサ毎監視可能期間を算出するセンサ毎監視可能期間算出機能22とを有するセンサ管理部20と、追尾精度貢献度DB32と、追尾精度貢献度を算出する追尾精度貢献度算出機能31とを有する誤差算出部30と、追尾精度貢献度の加算結果から最適割当スケジュールを算出する最適割当算出機能41を有する割当算出部40とを備える。
(もっと読む)
車載レーダ装置
【課題】精度良く他車の検出を行う「車載レーダ装置」を提供する。
【解決手段】画像監視部2の車種識別部22は、カメラ21で撮影した画像より、追尾中の他車の車両のタイプを識別する。他車識別部3のフィルタ特性制御部33は、識別された車両のタイプに応じたフィルタ特性をフィルタ31に設定する。フィルタ31は、設定されたフィルタ特性に従って、レーダ測位部1で計測された計測値をフィルタリングして、追尾中の他車のものとして許容できる計測値のみを抽出し、物標追尾部32は抽出された計測値を用いて他車の追尾を行う。
(もっと読む)
レーダ装置
【課題】受信信号のパワースペクトルに現れるJEMの周期性に着目して、JEM発生の有無を検出する有効な方法を適用したレーダ装置を得ることを目的とする。
【解決手段】受信信号のパワースペクトルを算出するパワースペクトル算出部と、算出されたパワースペクトルの自己相関関数を算出する自己相関関数算出部と、算出された自己相関関数を、当該自己相関関数から算出した標準偏差に基づいて設定した閾値と比較することにより目標に回転体が存在するか否かを判定する判定部を備える。
(もっと読む)
目標類別装置
【課題】蛇行目標の類別性能を向上させる目標類別装置を得る。
【解決手段】追尾情報の目標の距離で受信信号の位相補償を行い、補償後の信号に基づき算出したドップラー周波数により補償後の信号を更に位相補償し、再補償した信号に基づきドップラープロフィールを生成し、追尾情報、上記変化量率から推定したアスペクト角の変化量に基づいてドップラープロフィールをクロスレンジプロフィールに変換し、追尾情報に基づいて推定したアスペクト角に対応する候補目標の受信信号をライブラリから抽出して候補目標のドップラープロフィールを算出し、該ドップラープロフィールをアスペクト角の変化量に基づいて参照プロフィールに変換し、両プロフィールに基づいて観測目標と候補目標の特徴量をそれぞれ算出し、両特徴量を比較して目標類別を行う。
(もっと読む)
擬似直交波形レーダシステム、2次多相波形レーダ、およびターゲット位置決定方法
擬似直交波形の実施形態では、レーダシステム100は擬似直交波形を送信し、組合わせられた単一の受信機チャンネル信号で多重の相関を行う。2次多相波形の実施形態では、レーダシステム100は複数の送信アンテナにおける単一の2次多相波形の周波数分離されたバージョンを同時に送信し、各アンテナからの反射信号を組合わせて時間ドメイン信号を生成し、ターゲットの位置を突き止めるために組合された時間ドメイン信号でフーリエ変換を行う。レーダシステムは狙撃者の銃弾、入来する発射体、ロケット推進擲弾(PRG)、または迫撃砲の弾丸のようなターゲットを識別することができる。ある実施形態では、システムはターゲットの弾道を評価し迎撃することができる。実施形態ではシステムはターゲットの弾道を評価し、さらに狙撃者のようなターゲット源の位置を突き止めるためにターゲットの弾道を外挿することができる。 (もっと読む)
目標物の位置測定方法および位置測定装置
【目的】 広角レーダ装置において測定誤差の度合を示す値を出力できる「目標物の位置測定方法および位置測定装置」を提供することである。
【構成】 広角レーダ装置において、目標物の現在位置、速度、移動方向に基づいて所定時間後の目標物の位置を予測し、ついで、所定時間後の目標物の位置を測定し、該予測点と測定点を用いて目標物の現在位置を決定し、該現在位置と前記測定点位置との差を累積して測定誤差の度合を示す値を出力する。現在位置を決定するに際して、測定点までの距離に応じた第1の重みと測定誤差の度合に応じた第2の重みを考慮し、予測点と測定点を用いて目標物の現在位置を決定する。
(もっと読む)
飛翔体誘導システム
【課題】 飛翔体誘導システムが、飛来する敵機をキャッチしてこれを迎撃すべくミサイル等の飛翔体を発射させるとき、飛翔体が種別の異なる敵機に対しても容易かつ適切に対応できるようにする。
【解決手段】 捜索レーダ1が空間を捜索して目標Aを検出し、判定器2がその検出した目標Aの種別を判定する。
捜索レーダ1がキャッチした目標Aに向けて飛翔体6が発射され、飛翔体6が目標Aを検知して追尾するとき、予め判定器2によって判定された目標Aの種別に対応した目標検出プログラム(A1,A2,・・・An)が選択されて飛翔体6に送信供給される。
従って、飛翔体6は、異なる種別の目標Aに対応した操舵翼66a,66bに対する目標位置情報を、その送信供給された目標検出プログラムに基づき生成できるので、格別複雑な構成を採用することなく、異なる複数種別の目標Aに対応することができる。
(もっと読む)
空港面監視システムおよびこれに用いる航跡統合装置
【課題】 複数の目標検出装置を併用して空港面を監視する場合において、各目標検出装置の位置検出精度に応じた正確な統合航跡の座標位置を決定する。
【解決手段】 複数の目標検出装置を併用して空港面を監視し、前記複数の目標検出装置により検出された同一目標物についての航跡情報から統合航跡を生成して表示部に表示する空港面監視システムにおいて、空港面のセンターライン情報を蓄積したセンターラインデータベースからセンターライン情報を読み出し、そのセンターライン情報を用いて複数の目標検出装置により検出された各航跡情報の座標位置から基準センターラインまでの垂直距離をそれぞれ算出し、それら垂直距離に基づく重み付け割合により前記同一目標物について統合航跡の座標位置を決定する。
(もっと読む)
イベント捕捉およびフィルタリングシステム
【課題】 関心イベントを決定するために検出されたイベントをフィルタリングするシステムおよび方法を提供する。
【解決手段】 検出されたイベントを識別し、センサデータを評価して各イベントに関連する少なくとも1つの特性を決定し、複数の検出されたイベントとそれらの関連する特性とを報告する。少なくとも1つの関連イベント発生部が、少なくとも1つの関連イベントを生成し少なくとも1つのイベント報告を生成するように動作可能である。所与のイベント報告は、関連イベントに関連する少なくとも1つの特性を提供する。イベントフィルタリングシステムが、少なくとも1つのイベント報告を検出されたイベントと比較することにより、複数の検出されたイベントの中の少なくとも1つの関連イベントを識別する。
(もっと読む)
レーダ装置
【課題】 広帯域の電波の送受信を必要とせず、目標類別の精度が高い目標類別装置を得る。
【解決手段】 目標に送信信号を照射し、反射波を受信して受信信号を出力する送受信機20と、受信信号から目標の軌跡を推定する追尾処理部30と、受信信号を処理してクロスレンジプロフィールを生成するクロスレンジプロフィール生成部40と、クロスレンジプロフィールから特徴量を算出し、目標の類別を行う類別処理部50を備え、クロスレンジプロフィール生成部40は、オートフォーカス処理部42において受信信号のドップラー周波数の変化量を抽出し、アスペクト角変化量推定部44は、そのドップラー周波数の変化量を用いて目標のアスペクト角の変化量を推定する。そしてクロスレンジスケーリング部45において、アスペクト角変化量推定部44で推定したアスペクト角の変化量を用いてドップラープロフィールをクロスレンジプロフィールに変換する。
(もっと読む)
レーダ装置
【課題】 目標の重要度に応じたビーム分配により探知と追尾を同時に行うことで両者の性能を向上させたレーダ装置を提供する。
【解決手段】 探知された目標の航跡が追尾すべきTBMなどの移動体の航跡に合致する度合いに応じて、追尾に割り当てるビーム数を決定するための重要度を求める重要度算出器8と、重要度に応じて探知と追尾にそれぞれ割り当てるビーム数を算出するビーム分配数算出器10と、ビーム分配数算出器10が算出した分配数に従って探知及び追尾のビーム割り当てを制御するビーム制御部9とを備える。
(もっと読む)
目標識別装置
【課題】レーダで得られる画像データを対象に、形状や運動が似ている目標間での類識別を実現する目標識別装置を得る。
【解決手段】追尾データとレーダ観測諸元データとに基づいて、目標の運動あるいは姿勢に関する目標パラメータ推定値を推定する目標パラメータ推定器1と、候補目標の3次元形状データである目標別諸元データと、レーダ観測諸元データと、目標パラメータ推定値とに基づいて、候補目標ごとの辞書時系列画像列データを生成する辞書時系列画像列生成器2と、種類不明の目標をレーダで観測して得られた観測時系列画像列データと、辞書時系列画像列データとに基づいて、観測時系列画像列データに含まれる種類不明の目標の種類判別を行う種類判別器3とを備える。
(もっと読む)
1 - 17 / 17
[ Back to top ]