
Fターム[5J070BC06]の内容
レーダ方式及びその細部 (42,132) | 二次レーダ (1,855) | 態様 (846) | 物標識別 (271)
Fターム[5J070BC06]に分類される特許
41 - 60 / 271
空港面監視方法及び空港面監視システム

【課題】 複数の目標が接近して一目標と認識してしまう程度の方位分解能である一次レーダであっても、二次レーダを利用して、方位分解能を擬似的に向上させ、近接した複数の目標の誤検出を減少させて、精度の高い航跡(統合航跡)を生成することが可能な空港面監視方法及び空港面監視システムを提供すること。
【解決手段】 一次レーダから得られる目標位置と目標に搭載されたトランスポンダからの返信波を受信する二次レーダから得られる目標位置とを統合して目標位置の経時変化である目標の航跡の精度を向上させる空港面監視方法において、前記二次レーダが検出した二つの目標位置の目標間距離が、前記二次レーダが検出した二つの目標位置における前記一次レーダの分解能よりも小さいときに、前記目標間距離の中間座標及び中間座標の周辺に相当する前記一次レーダによる目標のエコーを間引き、前記一次レーダによる目標位置を検出して目標の航跡を得る。
(もっと読む)
電波到来方向推定装置および電波到来方向推定方法

【課題】電波到来方向を推定するための受信回路の構成を簡略にした、電波到来方向推定装置および電波到来方向推定方法を提供する
【解決手段】複数のアンテナ11は相対的な位置を固定して配置される。受信機1は、複数のアンテナの数より少ない数であって、所定の電波を受信する。時分割スイッチ14は、受信機1に同時には1つのアンテナ11が接続するように、受信機1とアンテナ11との接続を所定の周期で切り替える。直並列変換器4は、受信機1とアンテナ11との接続を所定の周期で切り替えて受信機1で受信した信号を、複数のアンテナ11のそれぞれで受信した信号に分配する。到来方向算出部5は、複数のアンテナ11のそれぞれで受信した信号に分配した信号から、受信した電波の到来方向を算出する。
(もっと読む)
位置推定装置及び位置推定方法
【課題】ビームアンテナを利用した位置推定において、高精度に位置推定を行なうことを課題とする。
【解決手段】位置推定装置は、指向性アンテナから出力されるビームの方向を制御し、制御された方向での指向性アンテナから出力されるビームを第1周波数で出力する。また、位置推定装置は、出力されるビームを第1周波数で出力した後に、第1周波数とは異なる第2周波数で出力する。また、位置推定装置は、第1周波数のビームの出力が到達した無線タグを有する端末装置から当該無線タグのIDを取得する。また、位置推定装置は、第2周波数のビームの出力が到達した無線タグを有する端末装置から当該無線タグのIDを取得する。また、位置推定装置は、第1周波数及び第2周波数のビームで共通に取得されたIDを特定し、特定されたIDとビームの方向とを出力する。
(もっと読む)
携帯型無線周波数識別(RFID)読取り機
ある特定の携帯型無線周波数識別(RFID)読取り機は、RFID装置からRFID信号を受信するための複数のアンテナ要素を含む能動型アンテナアレイを含む。アンテナ要素は、能動型アンテナアレイにより生成されるビームパターンを制御するための制御回路を含む。携帯型RFID読取り機は、和回路と差回路とをさらに含む。和回路は、複数のアンテナ要素のうちの少なくとも2つにより受信されるRFID信号を合計することにより和信号を決定するよう動作可能である。差回路は、複数のアンテナ要素のうちの少なくとも2つにより受信されるRFID信号同士の差信号を決定するよう動作可能である。携帯型RFID読取り機はまた、ビームパターンを電子的に誘導して、RFID読取り機からある特定のRFID装置への方向を特定するためのコントローラを含む。 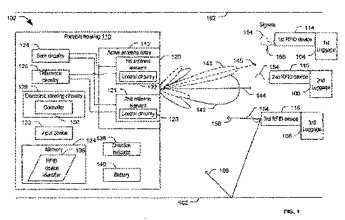 (もっと読む)
(もっと読む)
救難信号発振器
【課題】単純で無調整かつローコストな落水者の捜索方法とその救難信号発振器の実現を課題とする。
【解決手段】通常の航行機器 無線設備でホーミングできる落水者の方位探知用 トランスポンダーをマイクロ波の検波回路2と演算装置3 発振器4 応答アンテナ5を用いて構成し レーダー帯域ではなく無線通信装置に低周波での応答信号を送信する装置と、指差し操作によりレーダーPPIスコープ上で落水者方位を特定する救難信号発振器。
(もっと読む)
電子キーシステムのキー位置判定装置
【課題】電子キーの位置をより精度よく検出することができる電子キーシステムのキー位置判定装置を提供する。
【解決手段】車両の運転席アンテナ及び助手席アンテナから交互に電波を送信して、これら電波を電子キーが受信したときの磁界強度Hd,Hpと電波到来方向Kd,Kpとを算出する。そして、磁界強度Hd,Hpの大小を比較して、電子キーの車外位置を判定する。このとき、磁界強度Hd,Hpのうち高い側が磁界強度範囲Eaに位置して、単なる大小判定ではキー位置を判定できない場合、電波到来方向Kd,Kpの電波角度差θxからキー位置を判定する。電波角度差θxが重複範囲Ebに位置してキー位置を判定できない場合、電波角度差θx及び2つの磁界強度Hd,Hpを繋いだ三角線25を算出し、この三角線25が成す角度θrにより、キー位置を最終判断する。
(もっと読む)
移動体管理装置
【課題】タグを有しない移動体を的確に判定することのできる移動体管理装置を得る。
【解決手段】ID付き移動体動線作成部2は、ID付き移動体位置検知部1a,1b,1cの検知結果からタグの時空間の動線をID付き移動体動線として作成する。移動体動線作成部4は、移動体位置検知部3a,3b,3cの検知結果から移動体の時空間の動線を移動体動線として作成する。動線比較部5は、ID付き移動体動線と移動体動線とを比較し、動線が近いものを対応付ける。判定部6は、動線比較部5において、対応付けがなされない動線の移動体をタグを有しない移動体として判定する。
(もっと読む)
物体の向き検出システム
【課題】簡易かつ安価で正確に物体の姿勢を検出できる物体の向き検出システムを提供することを目的とする。
【解決手段】測定対象物30の両面にはRFタグユニット20a,20bが取り付けられている。RFタグユニット20a,20bは、それぞれRFタグ21a,21bと高透磁率シート22a,22bと電磁波遮断シート23a,23bとが順に積層されている。RFタグリーダ10の送信信号生成部11で生成された送信信号は、アンテナ13から電磁波として放射される。受信信号判定部12は、RFタグ21a,21bからの応答の有無に基づいて、測定対象物30のいずれの面がRFタグリーダ10のアンテナ13側を向いているのか判定し、うつ伏せ状態を検出する。
(もっと読む)
自律移動支援システムとその制御方法
【課題】移動端末あるいは基準局から発信する無線信号を、複数の中継手段によって中継しあるいは再発信し、位置特定手段によって受信することで、前記移動端末の位置を高精度で特定できる自律移動支援システムを提供する。
【解決手段】位置特定手段において移動端末の位置を特定し、あるいは位置特定手段において自局の位置を特定するシステムにおいて、無線信号が同一周波数であり、時分割でかつバースト信号として間欠発信するための、移動端末あるいは基準局と、前記移動端末あるいは基準局から発信される無線信号を中継しあるいは再発信するための中継手段と、位置を特定するための位置特定手段とから構成される。
(もっと読む)
2次監視レーダ及び信号処理方法
【課題】電波障害時であっても機上からの情報を正しく復号可能にすること。
【解決手段】2次監視レーダ装置は、ターゲットに対して複数の質問を送信する送信部23と、前記ターゲットから送られてくる前記質問に対する応答を受信する受信部22と、前記ターゲットの方位及び距離をもとに前記応答のタイミングを予測し、前記タイミングに基づいて前記複数の質問に対する応答の受信判定を行い、前記受信判定において受信できなかった応答を受信するために質問を再送し、前記受信された応答の順番を並べ替え、前記順番に基づいてターゲットレポートを作成する信号処理装置3とを具備する。
(もっと読む)
シミュレータ
【課題】信号の輻輳、輻輳、フルーツ干渉等の発生時における二次監視レーダ及びSIF装置の動作を検証する。
【解決手段】対象範囲に検証の対象として所定時刻に存在が想定される機体の位置と、当該機体が応答する信号の種別と、当該機体の送信信号の情報を関連付ける機体データを記憶する機体データ記憶部13eと、動作を検証する装置が機体に送信した所定形式の信号を入力すると、機体データから、入力した信号の送信対象である機体の位置及び信号の種別と関連付けられる送信信号の情報を検索する機体検索手段13fと、機体データから検索された送信信号の内容を合成して模擬信号を生成する応答発生手段13gとを備える。
(もっと読む)
超高感度距離又は位置計測システム
【課題】三次元位置を正確に測位できるシステムを提供する。
【解決手段】UWB送受信機1と、サーバー3と、UWB用RFタグTとを、備え、UWB送受信機1は、RFタグTから反射されるM系列のPN符号を、同期加算及び相関計算する。
(もっと読む)
モードSを有する二次監視レーダ装置及びその二次監視レーダ装置に用いられる制御方法
【課題】モードSによる運用を継続しながら、マルチパスの影響で発生するゴースト機のアジマス領域の測定を行い得るモードSを有する二次監視レーダ装置を提供する。
【解決手段】制御装置16において、モードSレーダ地上局がカバーする監視領域の少なくとも一部に対し、MIIP質問を行うことでモードSによるオールコール質問を行いつつゴーストターゲットやリアル機からモードA/Cによる応答信号を返送させ、モードAアドレスが重複して検出される方位の分布を測定するようにしている。
(もっと読む)
距離測定装置
【課題】複数の発受信手段の間で、時分割でかつバースト信号によって相互通信を行う場合に、相互間の距離を高精度で測定することができる距離測定装置を安価に実現する。
【解決手段】第1の発受信手段101から距離測定要求信号を時分割でかつバースト信号として発信し、これを受信した第2の発受信手段102において、前記距離測定要求信号に含まれる起点信号に同期しあるいは直交する距離測定信号を生成して時分割でかつバースト信号として発信し、これを受信した第1の発受信手段101において、前記起点信号をクロック信号とし、積和演算器を用いて前記距離測定信号の位相をリアルタイムで測定し、前記位相の測定結果から、第1の発受信手段101と第2の発受信手段102との間の距離を高精度で算出する。
(もっと読む)
モードSを有する二次監視レーダ装置及びその二次監視レーダ装置に用いられる制御方法
【課題】ゴースト応答の判定の確実性を向上し得るモードSを有する二次監視レーダ装置を提供する。
【解決手段】複数のレーダ地上局による重複監視領域をSLO設定領域とし、制御装置16において、まずオールコールによりレーダ地上局がカバーする監視領域を走査して得られた目標情報をアドレスとともにメモリ17に記憶しておき、SLO設定領域に対しSLO走査と非SLO走査とを実行し、SLO走査と非SLO走査とにより応答信号を返送する目標のアドレスと、メモリ17に登録されロールコールに移行した目標のアドレスとが一致するか否かを判定し、一致する場合に、SLO質問に対し返送された応答信号をゴースト応答として検出するようにしている。
(もっと読む)
半導体装置、無線タグおよび方向判定方法
【課題】自装置の向きを効率的に取得すること。
【解決手段】遮蔽部4は、入射する電磁波を遮蔽する。アンテナ2は、遮蔽部4の第1面側に設けられている。アンテナ3は、その第1面とは異なる遮蔽部4の第2面側に設けられている。方向判定部1aは、アンテナ2が電磁波を受信して出力される第1の信号と、アンテナ3が遮蔽部4を介した電磁波を受信して出力される第2の信号とに基づいて自装置の向きを判定し、判定結果を出力する。
(もっと読む)
不審者検知装置、不審者検知システム及び不審者検知方法
【課題】複数の不審者が侵入した場合においても、不審者の数及び不審者の位置を特定すること。
【解決手段】遅延時間変化解析部105は、広帯域なパルス信号が送信されてから、当該パルス信号が反射源により反射されて到来波として受信されるまでの遅延時間の時間的な揺らぎ(遅延時間変化)の周波数成分を抽出し、反射源判定部106は、入力される到来波の遅延時間の時間的な揺らぎ(遅延時間変化)の周波数成分に基づいて、到来波の反射源が、人体等の呼吸、心拍を伴う動体か、壁又は什器等の固定物体かを判定するようにした。また、送信パルスに広帯域なUWBパルス信号を用いることにより、時間軸上で到来波が分離されるため、エリア内に侵入した不審者を検知し、不審者の数を検出することができる。
(もっと読む)
動態監視システム
【課題】RFIDタグを利用した認証のセキュリティー性を向上することができる動態監視システムを提供する。
【解決手段】認証位置まで通じる複数の経路に沿って複数設けられた受信装置を介して、RFIDタグが送信するRFID用情報を読取るRFID読取り部と、受信装置の各々がRFID用情報を受信した時刻の差に基づいて、複数の経路の中からRFIDタグの移動軌跡を特定して蓄積する移動軌跡蓄積部と、RFID用情報が、複数の経路の中から選択された認証用軌跡情報とRFID用情報とは異なる個人認証用情報とに対応して予め記憶されている記憶部と、認証位置で個人認証用情報を用いて認証操作が行われた場合に、移動軌跡蓄積部に蓄積されたRFIDタグの移動軌跡と記憶部に記憶されている認証用軌跡情報との比較結果に基づいて、個人認証を行う認証部とを備えた。
(もっと読む)
駐車位置探索システム
【課題】車両方向を認識できる駐車位置探索システムを得ること。
【解決手段】本発明の駐車位置探索システムにおいて、携帯電子キー1は、探索開始ボタン11と、探索開始ボタン11がONの間、車両2との間で識別可能なIDを含む無線信号を送信する無線ID送信部12と、応答信号を受信する指向性超音波センサー13と、受信レベルを探索者へ通知する受信レベル通知部14とを備え、指向性超音波センサー13は、指向性を有し、車両2方向に向けて応答信号を受信した場合に応答信号を最大受信レベルで受信し、車両2は、無線信号を受信する無線受信部21と、受信した無線信号に携帯電子キー1との間で識別可能なIDが含まれているかを判定するID判定部22と、識別可能なIDが含まれていると判定された場合に応答信号を送信する超音波送信部23とを備える。
(もっと読む)
二次監視レーダ
【課題】航空機から受信する拡張スキッタを利用してロールコール期間における航空機の捕捉を行なう。
【解決手段】監視空域を飛行する航空機に質問信号を送信する送信手段122と、監視空域を飛行する航空機から送信された信号を受信する受信手段123とを備え、応答信号を受信すると、当該応答信号を利用して航空機の飛行を監視する二次監視レーダであって、受信手段が、航空機から送信された航空機の識別子及び位置情報を含む拡張スキッタを受信すると、当該拡張スキッタに含まれる位置情報を利用して、航空機が所定範囲に存在する否かを判定する位置判定手段135dと、位置判定手段によって、航空機が所定範囲に存在すると判定されると、当該航空機をロールコール期間の捕捉対象と決定し、当該航空機から受信した拡張スキッタに含まれる航空機の識別子及び位置情報を利用して、送信手段に質問信号を送信させる送信制御手段131とを備える。
(もっと読む)
41 - 60 / 271
[ Back to top ]