
Fターム[5J070BC12]の内容
レーダ方式及びその細部 (42,132) | 二次レーダ (1,855) | 質間信号及び応答信号 (481) | →f1と←f2 (38)
Fターム[5J070BC12]に分類される特許
1 - 20 / 38
信号処理回路および信号処理方法
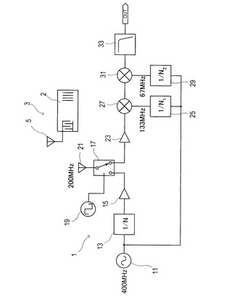
【課題】 検出性能の悪化を抑制できるSAWセンサ用の信号処理回路を提供する。
【解決手段】 発振回路11は、所定周波数の信号を出力する。その出力信号は、搬送波分周器13、第1分周器25、および第2分周器29に入力される。搬送波分周器13は入力信号を分周比Nで分周し搬送波を生成する。アンテナ21はSAWセンサ3から送信された受信信号を受信する。このとき、搬送波分周器13は動作を停止する。第1分周器25は入力信号を分周比N1で分周し第1基準信号を生成する。また、第2分周器29は入力信号を分周比N2で分周し第2基準信号を生成する。このとき、分周比は、N≠1、N≠N1、N≠N2、1/N2=|1/N−1/N1|という条件を満たす。
(もっと読む)
信号トランスポンダ

【課題】高精度で信号の周波数範囲を変換し、遠隔信号キャラクタリゼーションに適用可能なトランスポンダを提供することである。
【解決手段】本発明は、未知の信号源からの信号の周波数変換のための信号トランスポンダであって、未知の信号源から信号を受信するための入力手段と、受信した信号をフィルタリングするための入力フィルタと、受信した信号を増幅するための入力信号増幅器と、増幅されフィルタリングされた、受信した信号の周波数を、所定の周波数に変換するためのミキサと、周波数変換のために、ミキサに供給されるクロック信号を発生させるための局部発振器と、周波数変換された信号をフィルタリングするための出力フィルタと、周波数変換された信号を増幅するための出力信号増幅器と、フィルタリングされ増幅された、周波数変換された信号を送信するための出力手段とを備える、トランスポンダを提供する。
(もっと読む)
送受信装置及び同期システム
【課題】2つの送受信装置の間の同期確立と距離を測定する
【解決手段】他の第2送受信装置に対して第1信号を送信し、第2送受信装置において受信した第1信号を折り返して第2信号として返信して、フェズドロックループ(PLL)により同期をとる送受信装置である。基準信号を出力する基準発振器と、送信ベースバンド信号を発生する、位相と周波数が可変の信号発振器と、送信ベースバンド信号により搬送波を変調して得られる第1信号を送信する送信器を有する。第2送受信装置から受信した第2信号を復調して受信ベースバンド信号を得る受信器と、送信ベースバンド信号と基準発振器の出力する基準信号との第1位相差を検出する第1位相比較器と、受信ベースバンド信号と基準発振器の出力する基準信号との第2位相差を検出する第2位相比較器と、第1位相差と第2位相差との絶対値の差を出力する比較器とを有する。比較器の出力が零となるように、信号発振器の位相と周波数をフィードバック制御した。
(もっと読む)
電子キーシステムの位置推定装置
【課題】アレーアンテナを使用した位置推定の演算負荷を軽減でき、かつ電子キーに応答動作をとらせる発信機の通信エリア設定も簡略化することができる電子キーシステムの位置推定装置を提供する。
【解決手段】電子キーシステムは、電子キーがIDコード信号Sidを送信し、IDコード信号Sidを車両がアレーアンテナで受信すると、位置推定アルゴリズムによってIDコード信号Sidの電波到来方向を確認しつつ、IDコード信号Sidに含まれるIDコードを照合してID照合成立可否を確認する。位置推定装置は、どの発信機から送信されたリクエス信号Srqに応答して電子キーがIDコード信号Sidを返信してきたのかを確認することにより、位置推定アルゴリズムの演算に必要な初期位置を算出する初期位置算出手段と、初期位置算出手段が算出した初期位置を基に、位置推定アルゴリズムを使用して電子キーの位置を推定するキー位置推定手段とを備える。
(もっと読む)
距離測定装置及び距離測定方法
【課題】構造を簡単にして、2つの送受信装置の間の距離を測定する。
【解決手段】第1送受信装置から、第1基準信号S1に基づいて、第1基準信号の半周期毎に搬送波の周波数又は位相を変化させた第1状態Aと第2状態Bを有した送信信号S5を第2送受信装置に向けて送信する。第2送受信装置において、第1送受信装置からの受信信号を復調して、第1状態と第2状態とを検出する。第1状態と第2状態との受信期間が等しくなる半周期の期間だけ、所定周波数の返送搬送波を第1送受信装置に向けて送信し、第1送受信装置において、送信信号S5を、第2送受信装置から受信した返送搬送波S6により復調して、復調された信号における周波数又は位相に関する異なる2つの状態の期間のうち少なくとも一方の期間の長さに基づいて距離を求める。
(もっと読む)
距離測定装置
【課題】相対距離を高精度で測定するための距離測定装置を安価に実現する。
【解決手段】質問器101から第1の距離測定信号を含む無線信号を発信し、トランスポンダ102の第1のアンテナ25aによって前記無線信号を受信して第1の距離測定信号を再生し、周波数を分周して第2の測定信号を生成し、前記無線信号を前記第2のアンテナ25bによって反射させあるいは吸収させてASK変調した無線信号を再発信し、前記質問器101によって受信して前記第2の測定信号を再生し、前記第1の測定信号を基準として再生した第2の測定信号の位相を測定することによって、質問器101とトランスポンダ102との間の距離を高精度で測定する。
(もっと読む)
救難信号発振器
【課題】単純で無調整かつローコストな落水者の捜索方法とその救難信号発振器の実現を課題とする。
【解決手段】通常の航行機器 無線設備でホーミングできる落水者の方位探知用 トランスポンダーをマイクロ波の検波回路2と演算装置3 発振器4 応答アンテナ5を用いて構成し レーダー帯域ではなく無線通信装置に低周波での応答信号を送信する装置と、指差し操作によりレーダーPPIスコープ上で落水者方位を特定する救難信号発振器。
(もっと読む)
電子キーシステムのキー位置判定装置
【課題】電子キーの位置をより精度よく検出することができる電子キーシステムのキー位置判定装置を提供する。
【解決手段】車両の運転席アンテナ及び助手席アンテナから交互に電波を送信して、これら電波を電子キーが受信したときの磁界強度Hd,Hpと電波到来方向Kd,Kpとを算出する。そして、磁界強度Hd,Hpの大小を比較して、電子キーの車外位置を判定する。このとき、磁界強度Hd,Hpのうち高い側が磁界強度範囲Eaに位置して、単なる大小判定ではキー位置を判定できない場合、電波到来方向Kd,Kpの電波角度差θxからキー位置を判定する。電波角度差θxが重複範囲Ebに位置してキー位置を判定できない場合、電波角度差θx及び2つの磁界強度Hd,Hpを繋いだ三角線25を算出し、この三角線25が成す角度θrにより、キー位置を最終判断する。
(もっと読む)
電波反射装置、及び、光軸調整方法
【課題】レーダ装置の光軸を調整するための作業スペースを縮小する。
【解決手段】電波反射装置2は、レーダ装置1と対向させて配設され、レーダ装置1から送出された電波信号を反射するものであって、レーダ装置1から送出された電波信号を受信する受信アンテナ21と、受信アンテナ21によって受信された電波信号を、予め設定された遅延時間ΔTだけ遅延させて、遅延信号を生成する遅延回路22と、遅延回路によって生成された遅延信号を、レーダ装置1に向けて送出する送信アンテナ23と、を備える。
(もっと読む)
ゲート管理システム
【課題】省電力と通信品質を確保したゲート管理システムを提供する。
【解決手段】社員が所持する無線携帯機50が認証されたときに内蔵するモーター等の駆
動装置によりゲート4を開放するゲート装置3と、ゲート4の近傍に配置され、社員1、
2がゲート4の近傍に進入したことを検知してトリガ信号を発生するマット(トリガ信号
発生手段)48と、トリガ信号により起動してゲート4の近傍に送信電波を放射すると共
に、送信電波により起動された無線携帯機50から発信される電波を受信して管理情報に
基づいた認証判定及びゲート4の開閉制御を行なうゲート無線局51と、を備えて構成さ
れている。
(もっと読む)
パッシブRFIDタグの三次元位置を高精度に計測する方法
【課題】
パッシブRFIDタグの3次元位置を高精度で測定する。
【解決手段】
質問器からの電波AとRFIDタグの応答電波Bの到達時間差から求まる距離と電波Aと電波Bの位相差から求まる1波長内の距離との合成から、質問器からの距離を求め、3台の質問器を使用する事で、3次元位置を高精度で計測すると共に、RFIDタグの特性の違いによる誤差を、個体情報としてRFIDタグに書き込み、補正情報として使用する事で、より高精度な測定結果を得る。
(もっと読む)
距離測定方法、距離測定装置、非接触IC媒体、距離測定システム、および距離測定プログラム
【課題】非接触IC媒体が移動していても、高精度な距離測定を実行できる距離測定方法、距離測定装置、非接触IC媒体、距離測定システム、距離測定プログラム、および距離測定用応答プログラムを提供する。
【解決手段】リーダ装置から非接触IC媒体へ向けて第1周波数により問合せ信号を送信し、前記非接触IC媒体に前記第1周波数を第2周波数により変調させて変調後の周波数により応答信号を送信させ、前記リーダ装置が前記応答信号を受信して複数の周波数成分を取得し、取得した各周波数成分を用いて少なくとも2つの周波数成分の信号の間の位相差を算出し,該位相差を用いて前記リーダ装置から前記非接触IC媒体までの距離を測定する構成とした。
(もっと読む)
無線タグシステムおよび無線タグ
【課題】簡易なシステムで、然も、確実に、鳥獣被害での動物の行動把握や犬猫などのペットが逃げた時の位置の検出把握、或いは、自動車やバイクなどの盗難での所在場所の探索を行えるようにする。
【解決手段】無線タグ12を探索対象に取り付け、無線タグ12からのビーコンを無線機11で受信する。無線タグ12は、通常送信時には、ビーコン用の周波数チャネルを選び、送信間隔を広くして、ビーコンを送信する。一方、自身の属する受信エリア10から外れると、そのエリアの親となる無線機11からの信号が受信できなくなる。この時には、無線タグ12は、探索時の専用の周波数チャネルに変更して、送信間隔を短くして、ビーコンを連続送信させる。さらにこの無線タグの送信を受信した情報を会員サーバ15にアップロードすることで、他の利用者の探索に協力できるようにする。
(もっと読む)
レーダ装置およびアクティブターゲット装置
【課題】レーダ波を送信して目標物からの折り返し信号を受信し、各目標物との詳細な距離/速度を検出するとともに、目標物における無駄な電力消費を削減する。
【解決手段】制御部101は、無線通信機能の動作時に、目標物のアクティブターゲット装置を指定する局ID情報を含むパケットデータPDを出力し、変調回路105は、そのデータを発振器104からのレーダ波に乗せて送信する。アクティブターゲット装置は、自局の局ID情報を受信した場合に折り返し送信を起動し、ミキサ108は、レーダ機能の動作時に、送信レーダ波の一部と折り返し送信されたレーダ波を混合することにより、ビート信号を検出する。
(もっと読む)
距離測定装置
【課題】間に障害物があっても距離測定を可能とする距離測定装置を提供する。
【解決手段】第1の送受信機1000から第2の送受信機2000へ、周波数f1/MNの矩形波DTで周波数f1の搬送波をQPSK変調し、送信する。第2の送受信機2000は、コスタスループにより搬送波を再生し、矩形波D2を復調する。この後周波数f2(≠f1)の搬送波を生成して、復調した矩形波で周波数f2の搬送波をQPSK変調し、第2の送受信機2000から第1の送受信機1000へ逆送信する。第1の送受信機1000はここから周波数f1/MNの矩形波DRを復調する。矩形波DRをM逓倍し、矩形波DTを生成する1/M分周器15の入力である1/N分周器14との位相差を検出する。位相差は、第1の送受信機1000から第2の送受信機2000までの距離の2倍を電波が通過した時間差である。
(もっと読む)
状態検出システム及びそれに用いる親機並びに機器及び反射器
【課題】 マイクロ波を利用したドップラーセンサを用いつつ、子機側の回路規模が小さく簡単で、子機はキャリア周波数の発振が不要で、子機同士が干渉しない状態検出システムを提供すること
【解決手段】 複数の子機2とその子機に関する状態を検出する親機1とを備える。子機は、アンテナ23と、ベースバンド信号発生器21と、ベースバンド信号発生器によって発生されたベースバンド信号に基づき、アンテナに対するインピーダンスを可変するインピーダンス可変器22とを備え、ベースバンド信号発生器の周波数を子機ごとに異なせる。親機は、マイクロ波ドップラーセンサ10と、マイクロ波ドップラーセンサから出力されるIF信号を増幅するアンプ11と、そのアンプの出力を子機ごとに異なる周波数に基づいて周波数別の信号に弁別する複数のバンドパスフィルタ13と、IF検波回路14とを備える。
(もっと読む)
通過管理システム
【課題】部屋の入退室管理や商品の在庫管理などに使用され、壁の一方側と他方側とに設置される質問器がLF帯の起動信号を発生し、応答器がそれに応答して内蔵電池を電源としてUHF帯の信号で識別情報(ID)を含む応答信号を返信することで、質問器が壁を隔てて一方側から他方側へ通過する前記応答器を検知するようにしたLF帯、UHF帯併用の通過管理システムにおいて、そのような電波式によっても、壁の両側に設置した質問器間の干渉を無くせるようにする。
【解決手段】質問器31,32は、相反動作で前記起動信号を送信する(一方がONのときに他方はOFF)。したがって、安くて使い勝手の良い電波式を用いても、壁の両側にそれぞれ設置される質問器間での干渉を無くすことができる。これによって、それらを近接配置することができ、配線の引き回しなど、施工上の問題を小さくすることができる。
(もっと読む)
無線タグ通信装置及び無線タグ通信システム
【課題】簡単な構成により実用的なセキュリティシステムを実現する無線タグ通信装置を提供する。
【解決手段】無線タグ14との間の通信の指向性を制御する指向性制御部54と、その指向性制御部54により定められる各指向性における無線タグ14からの返信信号に基づいて所定の領域内における通信状態の変化を検出する通信状態変化検出部66とを、備えたものであることから、電波遮蔽物或いは電波反射物としての移動体94の移動による無線タグ14との間の通信の阻害やマルチパスの形成等を観察することで、所定の領域内における移動体94の移動を簡便に検出することができる。
(もっと読む)
距離測定装置
【課題】対象物からの信号と、対象物以外から反射された信号を識別して距離測定できる距離測定装置。
【解決手段】図1aは第1送受信機10、図1bは第2送受信機20の構成を示す。第1送受信機10は、平衡変調器106により生成した周波数の異なる2つの信号を送信する。第2送受信機20は、その2つの信号から非線形デバイス122により3次相互変調波を生成し、送信する。第1送受信機10はその3次相互変調波を受信し、位相差を検出する。この位相差により、第1送受信機10から第2送受信機20までの距離を測定できる。第1送受信機10が送信する信号の周波数と受信する信号(3次相互変調波)の周波数が異なるため、第2送受信機20以外からの反射波と区別でき、混信を防止できる。
(もっと読む)
距離測定方法及び距離測定装置
【課題】間に障害物があっても距離測定を可能とする距離測定装置を提供する。
【解決手段】図示した状態で、第1の送受信機1100から第2の送受信機2000へ、周波数f1/Nの矩形波DTで変調された周波数f1の搬送波を送信する。第2の送受信機2000は、受信波から周波数f1の搬送波を再生し、矩形波を復調する。この後周波数f1の搬送波から周波数f2の搬送波を生成して、復調した矩形波で周波数f2の搬送波を変調し、第2の送受信機2000から第1の送受信機1100へ逆送信する。第1の送受信機1100はここから周波数f1/Nの矩形波DRを復調し、矩形波DTとの位相差を検出する。位相差は、第1の送受信機1100から第2の送受信機2000までの距離の2倍を電波が通過した時間差である。内部回路での時間差(位相差)の補正のために、第2の送受信機2000と同一特性の第3の送受信機3000を用意しておく。
(もっと読む)
1 - 20 / 38
[ Back to top ]