
Fターム[5J070BC14]の内容
レーダ方式及びその細部 (42,132) | 二次レーダ (1,855) | 質間信号及び応答信号 (481) | 質問と応答の一方がコード化信号 (39)
Fターム[5J070BC14]に分類される特許
1 - 20 / 39
無線機の方位検出装置
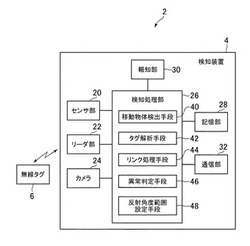
【課題】無線機の方位を電波の到来方向により検出する方位検出装置において、その近傍に反射物体が存在すると、反射波の影響により方位の検出精度が低下する。
【解決手段】記憶部28は電波の反射物体が存在する方位を示す反射角度範囲を記憶する。タグ解析手段42は電波の受信強度のピークに基づいて当該電波の到来方向を判定し無線タグ6の方位を検出する。タグ解析手段42は、受信強度の第1ピークに基づく到来方向が反射角度範囲内である場合には、受信強度の第2ピークに基づく到来方向の検出を試行し、その試行結果に応じて無線タグ6の方位を決定する。
(もっと読む)
航空機騒音監視方法及び航空機騒音監視装置

【課題】音響式の識別法に加えて、電波式識別法を用いた航空機騒音の識別性能を向上させる騒音監視方法を提供する。
【解決手段】航空機騒音監視装置は、飛行場周辺に設置したレーダ受信アンテナ12を通じ、受信部20により航空機からの応答信号を受信する。所定時間内で受信した応答信号は一時メモリ24に蓄積され、時間間隔分析部26により、時系列に並んだ全ての応答信号の時間間隔が算出される。ヒストグラム作成部28は、算出された時間間隔からヒストグラムを作成し、フィルタ部30は、その中で最も頻度が高い時間間隔をタイムゲートとして応答信号をフィルタリングする。
(もっと読む)
RFIDタグ位置検出装置およびRFIDタグの位置検出方法
【課題】迅速にRFIDタグの位置を検出する。
【解決手段】RFIDタグ位置検出装置1は、RFIDタグ2a〜2cへ信号を送信する送信アンテナ11と、RFIDタグ2a〜2cからの応答信号を受信する4つの受信アンテナ12a〜12dと、各受信アンテナ12a〜12dが受信した応答信号に応じて出力する信号の時間差を計測し、計測した各時間差に基づいてRFIDタグ2a〜2cの相対座標を演算する計測部とを備えている。
(もっと読む)
船舶識別装置
【課題】大規模な処理装置等を実装することなく、他の船舶に成りすましている不審船を検出することができるとともに、精度よく船舶の個体識別を行うことができるようにする。
【解決手段】信号特性照合部17により信号特性が合致していると判定された場合、AIS受信機14により受信されたAIS信号を発信しているAIS装置が搭載されている船舶については利用者IDに係る船舶であると判別し、信号特性照合部17により信号特性が合致していないと判定された場合、あるいは、その利用者IDがデータベース15に登録されていない場合、上記AIS装置が搭載されている船舶については不審船であると判別する。
(もっと読む)
端末装置及びプログラム
【課題】複数のRFタグと一の対象とを対応付ける。
【解決手段】端末装置1は、RFタグとの間で電波の送受信を行うアンテナ16、17と、アンテナ16、17が受信した電波に基づいてRFタグのID情報を取得し、アンテナ16、17が受信した電波の電波強度値をアンテナ16、17のそれぞれについて取得し、取得した電波強度値と当該電波強度値の検出時刻とID情報とを対応付けてアンテナ16、17のそれぞれについて記憶部13の電波強度値遷移テーブル132に記憶させ、電波強度値遷移テーブル132の記憶内容に基づいて、検出時刻の経過に対する電波強度値の変化が同一であるか又は近似する複数のRFタグがあるか否かを判別し、検出時刻の経過に対する電波強度値の変化が同一であるか又は近似する複数のRFタグがあると判別された場合、当該複数のRFタグ同士を対応付けるCPU11と、を備える。
(もっと読む)
エネルギー効率のよい送信のためのビット・レートおよび送信電力を選択する方法
伝搬時間距離決定方法は、ハンドセットからAPへとプローブ要求を送ることと、返りのACKを受信することとを含む。プローブ要求がAPへと伝搬するのにかかる時間と、ターンアラウンド時間と、ACKが伝搬してハンドセットへと返ってくるのにかかる時間とが、ハンドセットで測定される。ターンアラウンド時間が、測定された時間から減じられ、その結果が、距離決定を行うために使用される。電力の消費を減じるために、ハンドセットによってAP局へと送られたプローブ要求の許容可能な受信をもたらす「最低総送信エネルギー」設定が、決定される。最低総送信エネルギー設定は、ビット・レート設定と送信電力設定とを含む。最低総送信エネルギー設定は、伝搬時間距離決定トランザクションの実行にあたり、プローブ要求がハンドセットから送られる場合にプローブ要求を送るために使用される。 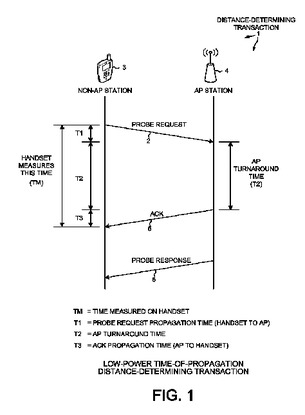 (もっと読む)
(もっと読む)
電子キーシステムのキー位置判定装置
【課題】電子キーの位置をより精度よく検出することができる電子キーシステムのキー位置判定装置を提供する。
【解決手段】車両の運転席アンテナ及び助手席アンテナから交互に電波を送信して、これら電波を電子キーが受信したときの磁界強度Hd,Hpと電波到来方向Kd,Kpとを算出する。そして、磁界強度Hd,Hpの大小を比較して、電子キーの車外位置を判定する。このとき、磁界強度Hd,Hpのうち高い側が磁界強度範囲Eaに位置して、単なる大小判定ではキー位置を判定できない場合、電波到来方向Kd,Kpの電波角度差θxからキー位置を判定する。電波角度差θxが重複範囲Ebに位置してキー位置を判定できない場合、電波角度差θx及び2つの磁界強度Hd,Hpを繋いだ三角線25を算出し、この三角線25が成す角度θrにより、キー位置を最終判断する。
(もっと読む)
無線端末装置、無線基地局装置、無線測距システム、及び、無線測距方法
【課題】アクティブ方式、セミパッシブ方式を問わず、UWBリーダとUWBタグ間の測距精度を向上すること。
【解決手段】タイミング制御部340は、基地局200から送信されたパルス信号の受信タイミング、及び、受信パルス信号を受信してから、当該受信パルス信号の検波信号に応じて生成される送信パルス信号を送信するまでに要する回路遅延時間の代表値に基づいて、基地局200から送信されたパルス信号の検波信号に応じて生成された再放射パルス、及び、再放射パルスの検波信号に応じて生成された再々放射パルスを、送信増幅器350が増幅するようなオンオフ制御する制御信号を、送信増幅器350に出力する。
(もっと読む)
建築物診断システム
【課題】電力消費電力を削減し、使い勝手が良く、小型化や安全性の面で優れた建築物診断システムを実現する。
【解決手段】複数の同軸ケーブル40によりタンデム状に接続された中継モジュール10、及び複数のセンサ26付きのRFIDモジュール20−1,20−2,・・・により構成されて壁等に埋設される伝送路と、リーダ/ライタモジュール50との間に、中継モジュール10を設け、その伝送路とリーダ/ライタモジュール10とを分離している。前記伝送路は、使用しない時には、給電の必要がない。使用時に、リーダ/ライタモジュール10から中継モジュール10を介して前記伝送路へ給電される。RFIDモジュール20に接続されたセンサ26の検知信号は、前記伝送路及び中継モジュール10を介してリーダ/ライタモジュール10にて読み取る。
(もっと読む)
床面沿いに可動な装置の位置を検出するローカライゼーションシステム
本発明に係るローカライゼーションシステムは、床面沿いに可動な装置の状態を検出するためのものであり、複数個のフロア送受信機を有し、そのフロア送受信機がそれぞれ床面沿い位置の点状標識となるフロアアンテナを有するフロア送受信システムと、当該可動な装置に装着され、床面を向く送受信面を有し、且つフロアアンテナのうち複数個の位置をその送受信面で同時的且つ連続的に検出する送受信タブレットと、を備える。 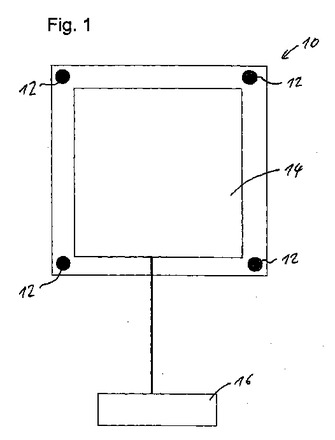 (もっと読む)
(もっと読む)
無線通信方法およびトランスポンダ
【課題】ASK変調された応答信号を良好なS/Nをもって確実に検出することができ、トランスポンダの省電力化、バッテリーレス化を図ることのできる無線通信方法およびトランスポンダを提供すること。
【解決手段】トランスポンダは、搬送波を受信し、かつ、前記搬送波に変調された応答信号を送信するアンテナと、前記搬送波を検波し、かつ、ASK変調された応答信号を変調する検波変調回路と、サブキャリア生成用の振動子と、応答信号を発するRFIDと、前記サブキャリアに応答信号をASK変調するASK変調回路とを備え、本体側送受信機は、アンテナと、前記搬送波を出力する第1の局部発振器と、前記振動子に対する励振信号を出力する第2の局部発振器と、前記励振信号を前記搬送波に変調する変調回路とを備えている。
(もっと読む)
パケット検出装置及びパケット検出方法、パケット検出装置及びパケット検出方法、距離測定装置及び距離測定方法、通信装置、コンピューター・プログラム
【課題】受信先端末からの返信パケットの到着時刻をディジタル処理におけるサンプリング・クロックよりも高い精度で判別する。
【解決手段】送信側と同じ特性のディジタル・フィルターのタップ係数を、クロック幅よりも細かい複数のタイミングでシフトさせ、各フィルターに通して複数種類の既知パターンをあらかじめ作成し保存しておく。そして、受信信号との複数種類の既知パターンの各々と相互相関を演算し、最大の相関値となる既知パターンに対応するタイミングをパケットの到来時刻と推定する。サンプリング・クロック幅よりも高い精度でのパケット位置の到着を推定可能になる。
(もっと読む)
無線識別システム及びプロトコル
【課題】
対象物の検出、識別、制御及び/又は位置特定を行う。
【解決手段】
用いられる環境に依存して動作モード及びフォーマットにおいて柔軟であるモニタリング・システム及びプロトコルが開示されている。そのようなモニタリング・システム及びプロトコルは、それらの利用を自動的に又はそうするための受信された命令により変えることができる。位置検出システムは、1つ又はそれより多い低周波数送信器、1つ又はそれより無線周波数モニタリング・タグ、及び1つ又はそれより多い受信デバイスを含む。低周波数送信器は、送信器IDのような位置識別情報を送信の近傍のタグに送る。タグは、当該タグから受信器へ送られるより高い周波数送信を用いて送信器IDを中継する。同時に開始する複数のタグのタグ送信を解読するのを可能にする通信プロトコルが開示されている。
(もっと読む)
無線タグ距離測定装置および無線タグ距離測定システム
【課題】無線タグ距離測定装置において、距離測定を行うための事前処理を容易にすることを目的とする。
【解決手段】無線タグ距離測定装置10は、拡散処理が施されていないパルス変調信号を送信する。各無線タグは、無線タグ距離測定装置10から送信されたパルス変調信号を受信する。そして、自らに固有に割り当てられたPN符号によってパルス変調信号に拡散処理を施し、拡散処理後の信号を拡散パルス変調信号として送信する。無線タグ距離測定装置10は、各無線タグから送信された拡散パルス変調信号に基づいて各無線タグの固有割り当てPN符号を検出する。無線タグ距離測定装置10は、測定対象PN符号記憶部20に記憶されているPN符号を用いて無線タグまでの距離を測定する。
(もっと読む)
移動体位置検出装置、移動体位置検出システム及びプログラム
【課題】データ量の増加を軽減し、検出漏れを防ぐことができる移動体位置検出装置、移動体位置検出システム及びプログラムを提供する。
【解決手段】移動体位置検出装置10は、移動体2に設けられた無線タグ3から固定して配置された複数のセンサ(受信デバイス)4により受信されたタグ識別情報を、受信デバイス識別情報とともに受信履歴情報として順次記憶するセンサ履歴保持手段11と、所定の回数連続していずれかのセンサ4で受信されたタグ識別情報が受信履歴情報に存在するか否かを判定し、存在すると判定したとき、当該タグ識別情報に対応する移動体2の位置を、タグ識別情報を連続して所定の回数受信したセンサ4の位置に基づいて決定する検出判定手段13とを備える。
(もっと読む)
自動車のアクセスコントロールおよびイモビライザのための電気回路、ならびにアンテナドライバの測定方法
本発明は、自動車のアクセスコントロールおよびイモビライザのための電気回路、ならびにアンテナドライバを較正するための方法に関する。車両のアクセスコントロールとイモビライザのための電気回路が提供される。電子回路は、車両のアクセスコントロール用の、ID発信器(3)の識別時に信号(100)を送信する第1アンテナ(19)を駆動するための第1アンテナドライバ(12)を含む。さらには車両のイモビライザ用の、ID発信器(3)の識別時に信号(104)を送信する第2アンテナ(21)を駆動するための第2アンテナドライバ(24)が設けられている。さらに電子回路は、イモビライザ用の、ID発信器(3)の識別のためにアンテナ(21)によって受信された信号を受信する受信装置(14)を含む。第1アンテナドライバ(12)および受信装置(14)は、共に1つの半導体チップ(1)に組み込まれている。 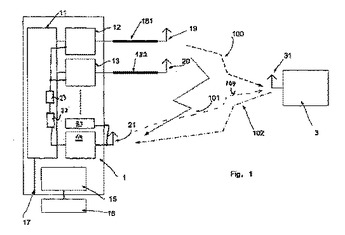 (もっと読む)
(もっと読む)
無線タグシステムおよび無線タグ
【課題】簡易なシステムで、然も、確実に、鳥獣被害での動物の行動把握や犬猫などのペットが逃げた時の位置の検出把握、或いは、自動車やバイクなどの盗難での所在場所の探索を行えるようにする。
【解決手段】無線タグ12を探索対象に取り付け、無線タグ12からのビーコンを無線機11で受信する。無線タグ12は、通常送信時には、ビーコン用の周波数チャネルを選び、送信間隔を広くして、ビーコンを送信する。一方、自身の属する受信エリア10から外れると、そのエリアの親となる無線機11からの信号が受信できなくなる。この時には、無線タグ12は、探索時の専用の周波数チャネルに変更して、送信間隔を短くして、ビーコンを連続送信させる。さらにこの無線タグの送信を受信した情報を会員サーバ15にアップロードすることで、他の利用者の探索に協力できるようにする。
(もっと読む)
モードS二次監視レーダ
【課題】モードS二次監視レーダによるトランスポンダの捕捉の精度を向上させる。
【解決手段】ロールコール期間で捕捉する登録機に関する情報が登録される登録テーブル138と、ロールコール期間における捕捉の対象の候補である仮登録機に関する情報が登録される仮登録テーブル137と、オールコール期間に登録機以外の航空機からオールコール応答以外の信号を受信したとき、航空機を仮登録機として仮登録テーブル137に登録する仮登録部132dと、ロールコール期間に登録機にロールコール質問を送信するとともに、仮登録機にロールコール質問を送信する送信制御部131と、ロールコール質問に応答して、仮登録機からロールコール応答を受信したとき、仮登録機を新たな登録機として登録テーブルに登録する登録部132eとを備えている。
(もっと読む)
動態監視システム
【課題】 狭いスペースにおける移動体の位置把握を細かく分けて認識することが難しく、セキュリティ面での不安もあり、狭い空間範囲においても人などの移動体が、いつ、どの方向に移動したかといった位置把握を可能とする。
【解決手段】 移動体が通過するゲート11の通過方向に第1赤外線センサ12並びに第2赤外線センサ13を設置し、第1並びに第2センサは、移動体がゲートを通過するに伴って第1センサのみが作動し、その後第1並びに第2センサの両方が作動し、その後第2センサのみが作動するようにゲートの位置に設置され、移動体が携行するRFIDタグ15からのID信号並びに第1・第2センサからの出力信号に基づいて移動体の動態を監視する。
(もっと読む)
無線測位システムおよび無線測位方法
【課題】本発明の目的は、高速で移動する移動体の位置座標を高精度で測位するシステムと無線測位方法を提供することである。
【解決手段】本発明では、移動体は測位基準点となる複数のマーカ装置に測位要求信号を同報送信し、複数のマーカ装置は測位要求信号を受信した時に、測位データを前記マーカ装置固有の通信チャンネルを用いて前記移動体に送信し、前記移動体は前記測位データによる前記マーカ装置の座標、マーカ装置までの往復時間を用いて移動体の現在位置座標を決定する無線測位システムを用いる。移動体と複数マーカ間における測位の通信時間が短縮され、移動体の正確な測位が可能となる。
(もっと読む)
1 - 20 / 39
[ Back to top ]