
Fターム[5J070BC15]の内容
レーダ方式及びその細部 (42,132) | 二次レーダ (1,855) | 質間信号及び応答信号 (481) | 質問と応答がパルス波 (96)
Fターム[5J070BC15]に分類される特許
41 - 60 / 96
電波伝搬時間計測校正方法、距離計測方法、電波伝搬時間計測校正システム及び距離計測システム
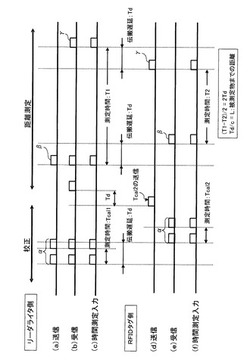
【課題】親局及び子局の距離を簡易な構成で正確に計測可能とする電波伝搬時間計測校正技術及び距離計測技術を提供する。
【解決手段】リーダライタ10から1対のパルスαをRFIDタグ100に送信するとともにパルス間隔Tcal1を計測する。RFIDタグ100では、パルス間隔Tcal2を計測し、リーダライタ10へ送信する。リーダライタ10では、Tcal1とTcal2の差に基づいて電波伝搬時間計測の校正を行う。その後、リーダライタ10からRFIDタグ100に要求パルスβを送信する。RFIDタグ100では、βに対する応答パルスγ及びβを受信してからγを送信するまでの時間T2をリーダライタ10に送信する。リーダライタ10では、βを送信してからγを受信するまでの時間T1を計測するとともにT2を校正し、校正したT2とT1の差からリーダライタ10とRFIDタグ100の距離を算出する。
(もっと読む)
無線タグ情報読み取り装置

【課題】操作者に対し、無線タグ回路素子からの応答信号の受信結果に精度よく対応した報知を確実に行う。
【解決手段】無線タグ回路素子Toに対し情報送受信を行うためのリーダアンテナ3を備えた移動型のリーダ1は、IC回路部150に記憶された情報を取得するための応答要求コマンドを生成してリーダアンテナ3を介し送信し、応答要求コマンドに応じ無線タグ回路素子Toから返信された応答信号をリーダアンテナ3を介して受信し、この受信結果に応じて操作者への報知を表示部8で行い、表示部8による報知が受信処理後報知開始までのリーダ1の移動に少なくとも対応した態様となるように表示部8を制御する。
(もっと読む)
位置測位を行う無線制御局及び移動通信システム
【課題】無線基地局から移動局に下り信号を送信し移動局から上り信号を受信するまでの時間である基地局RTTと、移動局が基地局から下り信号を受信し基地局へ上り信号を送信するまでの移動局送受信時間差を移動局にて測定した値である移動局RTTとを用いて、より正確に移動局の測位を行う無線制御局を提供する。
【解決手段】無線基地局は、無線制御局から基地局RTT測定結果報告の指示を報告の回数及び報告周期と共に受けると、基地局RTTを測定し、測定した基地局RTTを無線制御局に報告する。無線制御局は、報告された基地局RTT測定結果を、該基地局RTT測定結果報告の報告周期の回数を示す番号と対応付けて格納し、報告周期の回数を示す番号に対応する基地局RTT測定結果及び移動局RTT測定結果を組み合わせて、組み合わせの差分を用いることにより無線基地局と移動局の間の電波伝播時間を算出し、算出した電波伝播時間から無線基地局と移動局との間の距離を算出する。
(もっと読む)
無線タグおよび無線タグ距離測定装置
【課題】無線タグ距離測定システムにおいて、複数の無線タグからそれぞれ送信される応答信号の干渉を回避し、距離測定装置からの距離が等しい複数の無線タグまでの距離を測定可能とすることを目的とする。
【解決手段】無線タグ距離測定装置10Bは、距離測定対象の無線タグの固有割り当てPN符号によって、パルス変調信号に対して拡散処理を施し、拡散パルス変調信号を送信する。拡散パルス変調信号の拡散処理に用いられたPN符号と自らの固有割り当てPN符号とが一致する無線タグは、受信した拡散パルス変調信号に対して逆拡散処理を施した復元パルス変調信号を送信する。無線タグ距離測定装置10Bは、復元パルス変調信号を受信すると、拡散パルス変調信号を送信してから復元パルス変調信号が受信されるまでの時間に基づいて、距離測定対象の無線タグまでの距離を算出する。
(もっと読む)
無線端末装置およびゲイン調整方法
【課題】送受信信号の信号レベルを合わせるように調整することにより、信号レベル差による誤差発生を防止し、距離測定の精度を向上させることが可能である。
【解決手段】信号の送受信を行う無線通信部1と、無線通信部1による送受信信号の信号レベルを増幅する信号増幅・フィルタ部3と、増幅された送受信信号のうち、予め設定された所定の検出閾値よりも大きい信号レベルの信号を送信信号または受信信号として検出するADC4と、ADC4による検出結果に基づく無線通信の信号の往復時間から電波伝播遅延時間を計測して相手無線端末装置との間の距離を求めるとともに、信号増幅・フィルタ部3のゲイン調整を行う測定制御・時間計測部5とを備え、上記往復時間の測定時に、送信信号と受信信号との信号レベルを合わせることで、電波減衰による測定精度の低下を防止する。
(もっと読む)
二次監視レーダ装置
【課題】従来の監視方法では監視が困難であったモードS機の応答状態を把握しやすくする。
【解決手段】オールコール期間とロールコール期間とを設定して、航空機を捕捉するモードS二次監視レーダ1であって、オールコール期間にロールコール質問を送信する送信手段122と、ロールコール質問に対応したロールコール応答を受信する受信手段123と、予めオールコール期間に設定されたタイミングで受信したロールコール応答を解読する解読手段132とを備える。
(もっと読む)
無線タグシステムおよび無線タグ
【課題】簡易なシステムで、然も、確実に、鳥獣被害での動物の行動把握や犬猫などのペットが逃げた時の位置の検出把握、或いは、自動車やバイクなどの盗難での所在場所の探索を行えるようにする。
【解決手段】無線タグ12を探索対象に取り付け、無線タグ12からのビーコンを無線機11で受信する。無線タグ12は、通常送信時には、ビーコン用の周波数チャネルを選び、送信間隔を広くして、ビーコンを送信する。一方、自身の属する受信エリア10から外れると、そのエリアの親となる無線機11からの信号が受信できなくなる。この時には、無線タグ12は、探索時の専用の周波数チャネルに変更して、送信間隔を短くして、ビーコンを連続送信させる。さらにこの無線タグの送信を受信した情報を会員サーバ15にアップロードすることで、他の利用者の探索に協力できるようにする。
(もっと読む)
物品管理システム
【課題】どの作業者が何処でどの物品を運搬したかを管理することを可能にする。
【解決手段】物品が運搬中であるか所定の場所に置かれたかの状態の遷移を検知して、その状態遷移のタイミングで物品と人物の位置を測位しその測位結果に基づいて物品と人物とを紐付ける。
(もっと読む)
モードS二次監視レーダ
【課題】モードS二次監視レーダによるトランスポンダの捕捉の精度を向上させる。
【解決手段】ロールコール期間で捕捉する登録機に関する情報が登録される登録テーブル138と、ロールコール期間における捕捉の対象の候補である仮登録機に関する情報が登録される仮登録テーブル137と、オールコール期間に登録機以外の航空機からオールコール応答以外の信号を受信したとき、航空機を仮登録機として仮登録テーブル137に登録する仮登録部132dと、ロールコール期間に登録機にロールコール質問を送信するとともに、仮登録機にロールコール質問を送信する送信制御部131と、ロールコール質問に応答して、仮登録機からロールコール応答を受信したとき、仮登録機を新たな登録機として登録テーブルに登録する登録部132eとを備えている。
(もっと読む)
所在管理システム
【課題】複数の各空間に所在管理リーダが配置され、使用者が所持する無線アクティブタグが前記リーダに一定の時間間隔でユニークな自IDを発報することで、前記各空間における該タグの移動の推移や現在位置を前記リーダ側に管理させる所在管理システムにおいて、消費電力を削減し、タグの内蔵電池の長寿命化を図る。
【解決手段】前記複数の空間に区分されたオフィスから成る第1の空間領域と、廊下から成る第2の空間領域との往来部(ドア)に、前記タグへ質問信号を送信し、応答信号が受信されることでタグの通過を検出する入退室管理リーダを設置するとともに、前記所在管理リーダは、前記自IDが受信されるとそれに対するACK信号を送信するようにし、前記タグは、前記応答信号を送信してから、前記自IDの発報に対するACK信号が受信される間は前記自IDの発報を継続し、前記ACK信号が受信されないと発報を休止する。
(もっと読む)
物体探索装置、物体探索システム及び無線通信端末
【課題】 予め探索対象物体(例えば、物品、生物、人間など)の位置情報を登録することなしに、その探索対象物体が現在何処にあるのかを明らかにする物体探索システムを提供する。
【解決手段】 本発明による物体探索システムは、探索対象物体を探索する物体探索装置と、探索対象物体に付けられている無線タグとを備える物体探索システムであって、物体探索装置は、無線タグと通信をする無線通信手段と、無線タグと電波を送受信する際の電波情報に基づいて無線タグとの間の距離を測定する手段と、距離を測定した測定位置の位置情報を取得する手段と、2以上の異なる測定位置において距離が測定されると、距離と測定位置の位置情報とに基づいて探索対象物体の位置を推定する手段と、推定された位置に関する情報を出力する出力手段とを有することを特徴とする。
(もっと読む)
モードS二次監視レーダ及び位相判定システム
【課題】送信するモードS質問における信号の内容、位相反転の状態、波形の性能等P6パルス(データブロック)に関する性質を確実かつ容易に確認することができるモードS二次監視レーダを提供する。
【解決手段】航空機に搭載されているトランスポンダ2に対し、DPSKによりデータの位相が反転されたデータブロックを含むモードS質問を送信する送信部121aと、モードS質問の生成するとともに、モードS質問と同期し、モードS質問のデータブロックの位相を反転しない基準信号を生成する生成部112と、モードS質問の位相反転を判定する計測器3に、モードS質問及び基準信号を出力する出力手段121bとを備える。
(もっと読む)
DME地上装置
【課題】マルチパス環境下におけるシステム遅延を、容易に調べることのできる機能を有するDME地上装置を提供すること。
【解決手段】DME地上装置10の監視制御部14内のマルチパス試験部23は、擬似質問信号を発生する擬似質問信号発生部24と、この擬似質問信号発生部24により発生した前記擬似質問信号に所定の遅延及び位相を付与し反射波としての擬似質問信号を生成する擬似信号生成手段25、26と、この擬似信号生成手段25、26により生成された反射波と擬似質問信号発生部24により発生された信号である直接波とを合成する信号合成手段27とを具えるようにする。
(もっと読む)
DME地上装置
【課題】DME地上装置で、送信パルス数が増大した場合にも、十分に適用することができる調整が容易で小型化可能な装置を提供すること。
【解決手段】DME地上装置10のトランスポンダ部13は、応答信号として送信される送信レートを検知し、該送信レートが大きくなればそれに対応してトランスポンダ部13に設けられているパルス検出部16の受信レベルのスレッショールドを高くする制御を行なう。
(もっと読む)
DME地上装置
【課題】スキッタパルス生成手段を熱雑音に依存せずに、外来パルスによる影響を排除してスキッタパルスを生成させ、それにより、常に、適正な送信レートでスキッタパルスを送信することができるDME地上装置を提供すること。
【解決手段】DME地上装置10で、送信レート監視制御部18の制御により、トランスポンダ部13は、受信した質問信号を解読して応答信号を生成し送出する際の送信レートを監視し、監視した結果で送信レートが所定に達している場合は応答信号を送信し、送信レートが所定に達していない場合はスキッタパルスを送信する。
(もっと読む)
DME地上装置およびシステム遅延時間の測定方法
【課題】設置場所に応じてシステム遅延時間を測定するための調整を行う必要のないDME地上装置などを提供する。
【解決手段】航空機から送信される質問信号を受信し前記航空機に応答信号を送信するDME空中線と、前記応答信号の送信を検出する空中線検出部と、第1のケーブルを介して接続される方向性結合器と、方向性結合器に接続され応答信号を生成し所定のシステム遅延時間後に応答信号を送出するトランスポンダ部と、前記空中線検出部に第2のケーブルを介して接続され、前記トランスポンダ部を監視する監視制御部と、を有するDME地上装置であって、前記システム遅延時間を測定するときには、前記監視制御部において生成し送出した擬似質問信号を前記方向性結合器を介して前記トランスポンダ部に入力し、この擬似質問信号に対応する応答信号を送出し、前記監視制御部に有するシステム遅延測定部に送ることにより、前記システム遅延時間を測定する。
(もっと読む)
DME地上装置
【課題】構成が簡単で指定周波数に応じて内蔵回路の特性を調整する必要のない、DME地上装置を提供すること。
【解決手段】本発明の一例のDME装置は、飛行中の航空機からの距離測定のために送信される質問信号を受信して、対応する応答信号を応答信号生成部において生成して送信するDME地上装置であって、前記応答信号生成部は、発振出力を増幅して得られたRF駆動信号を増幅するRF駆動信号増幅部と、このRF駆動信号増幅部により増幅された信号をパルス変調するパルス変調部とを有し、前記RF駆動信号増幅部をC級増幅させる。
(もっと読む)
SSRモードSにおけるパーシャル検出航空機の監視方法及び装置
【課題】極力電波環境の悪化を避け、管制に必要なレベルまでパーシャル検出航空機の検出率を上げ、2つのレポート(モードA/CとモードSターゲットレポート)の出力を抑制又は防止する。
【解決手段】信号処理部4は通常はSSRモードSで運用し、パーシャル検出航空機がレーダの覆域又はセクタ等の所定アリアに存在することを自動検出した際、アラームを発出し、そのエリアに対しMIIPモード又はモードSモード等、パーシャル検出航空機からもモードA/C応答が得られるモノパルス形式の質問を含むモードで運用する。必要なエリア等においてのみ各航空機からモードA/C応答を得ることにより、パーシャル検出航空機の検出率を上げることができ、かつ、不要なモードA/C応答を最小限にすることができる。
(もっと読む)
無線通信装置および無線通信装置における距離測定方法
【課題】通信への制約及び通信からの制約を抑えかつ精度の高い測距が行える無線通信装置および無線通信装置における距離測定方法を提供する。
【解決手段】電波の伝播遅延時間により通信相手の無線通信装置との距離を検出する方法であって、搬送波から無線通信フレームの終了を検出し、自身が送信する第1無線通信フレームの送信終了タイミングから通信相手の無線通信装置からの第2無線通信フレームの受信終了タイミングまでの第1フレーム終了間時間と、送られてくる通信相手の無線通信装置での前記第1無線通信フレームの受信終了タイミングから前記第2無線通信フレームの送信終了タイミングまでの第2フレーム終了間時間を計測する工程と、前記第1フレーム終了間時間と第2フレーム終了間時間の時間差から通信相手の無線通信装置との距離を演算する工程と、を備えた。
(もっと読む)
対象物認識装置
【課題】対象物の数や種類を問わず、特定の対象物の種類と位置と向きとを正確に認識することが可能な対象物認識装置を提供する。
【解決手段】エコー波を発信する共振タグ(例えば1,2,3…)と、共振タグを配設した対象物(例えば11a,11b)に対し、所定の周波数(例えばf1〜f8)の電磁波(例えばW1〜W8)を送信すると共に、当該電磁波を送信した際に共振タグから発信されるエコー波(例えばF1,F2,F3…)を検出する検出系9と、検出系を複数配列することにより対象物載置領域35が構成され、当該対象物載置領域に対して部分的に重なっている対象物の占有面積に応じて増減変化するエコー波の電圧値レベルを認識する認識系27とを備えている。
(もっと読む)
41 - 60 / 96
[ Back to top ]