
Fターム[5J070BD01]の内容
レーダ方式及びその細部 (42,132) | 組合せ (788) | 一次レーダと一次レーダ (279)
Fターム[5J070BD01]の下位に属するFターム
バイ又はマルチスタチックレーダ (72)
Fターム[5J070BD01]に分類される特許
41 - 60 / 207
電波受信装置及び到来方向測定方法
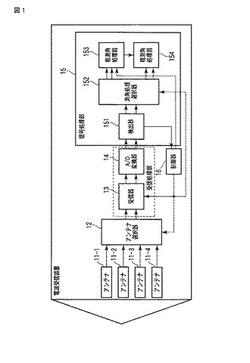
【課題】レーダ波の到来方向を、精度良く、短時間で求めることができ、かつ小さなハードウェア規模を実現することが可能な電波受信装置及び到来方向測定方法を提供する。
【解決手段】まず、アンテナ11−2,11−3からの受信波に基づいて、粗測角処理器153で振幅モノパルス方式を利用して、レーダ波の到来方向を測定する。その後、アンテナ11−1,11−4からの受信波に基づいて、精測角処理器154でインターフェロメータ方式を利用すると共に、粗測角の結果を参照して、レーダ波の到来方向を測定する。
(もっと読む)
マルチラテレーション装置及びこれを用いた空港面監視システム

【課題】 空港面監視システム内の目標検出装置であるMLAT装置は、複数の受信機2で受信しその時間差から目標(航空機)の位置を特定する。このため受信機数が多いと、受信機の組合せ数により多数の検出位置解が発生し、特に1つ以上の検出位置解がマルチパス等により大きく外れると検出位置がばらついてしまう。
【解決手段】航空機5が通過予定である経路のセンターライン位置情報を利用するためセンターラインDB14に蓄積する。複数の検出位置解から検出位置を特定する際に、基準となるセンターラインから各検出位置解までの距離に応じて重み付けを行ない位置座標を特定する。この結果検出位置のばらつきが押さえられ、検出位置精度が向上する。また、他の目標検出装置が検出した位置座標と統合する以前に早い段階で、MLAT装置1にて検出精度が向上するので、管制官の負担を軽減した空港面監視システムを構築できる。
(もっと読む)
レーダ装置並びにその表示制御方法及びプログラム
【課題】各レーダ系統からの複数の目標表示信号を表示画面上に一定の規則に従って表示させ、操作員による複数の輝線の監視を容易にし、目標の探知を見落とす危険性を低くし、かつ高速で移動する複数の目標の位置を誤差なくリアルタイムに表示させる。
【解決手段】各表示用信号201,…に含まれる目標の距離データは、距離データ変換回路109によって、基準表示領域における距離となるように変換される。各表示用信号201,…に含まれる目標の角度データは、角度データ変換回路109によって、基準表示領域における角度となるように変換される。そのため、各表示領域における各目標は、基準表示領域に瞬時に重ねて表示される。したがって、一つの基準表示領域にすべての目標が表示されるので操作員による監視が容易になるとともに、高速で移動する複数の目標の位置をリアルタイムに表示できる。
(もっと読む)
センサネットワークシステムおよびセンサ装置
【課題】さらに高い追尾性能を実現するセンサネットワークシステムを得ること。
【解決手段】本発明は、複数のセンサ、および複数のセンサを制御する制御装置を含んだセンサネットワークシステムであって、制御装置は、センサの各々における観測結果に基づいて、どのセンサからどのような情報を出力させるかを示す情報である優先度の暫定値をセンサ毎に決定し、センサの各々は、近隣のセンサとの間で観測動作に関する情報を交換し、得られた観測動作情報に基づいて、制御装置で決定された自センサの優先度の暫定値を調整し、制御装置は、各センサで調整された後の優先度に基づいて通信帯域制御を行う。
(もっと読む)
センサネットワーク装置
【課題】通信量を抑制した、ネットワーク装置を提供。
【解決手段】状況推定部15は、接続されたそれぞれのセンサ装置100に関する推定規則を予めあるいは定期的に交換し共有保持し、推定規則に関するシミュレーションを行うことにより、状況情報とで判断した表示要求満足性を付与した表示要求送付情報、状況情報とで判断した優先度を付与した制御要求送付情報、また、センサ装置10の状況情報については変化が認められた場合にすべての送付先への状況送付情報を生成するよう動作し、表示要求管理部11は、表示要求送付情報を表示要求管理部に送るよう動作し、表示情報管理部14は、他装置から受信した表示要求送付情報の表示要求満足性で表示情報必要性が肯定されている場合にのみ、センサ装置100で生成された表示情報を要求元の他装置へ送付するよう動作し、制御要求管理部12は、制御要求送付情報を、対応する他装置の制御要求管理部へ送付する。
(もっと読む)
目標追尾装置
【課題】必要最小限のネットワーク通信容量で、各センサにおける送信制御または各センサを管理する管理サーバによる送信要求制御を行うことを可能にし、ネットワーク通信容量の低減を図った目標追尾装置を提供する。
【解決手段】センサ側からセンサ観測情報を集約した再追尾センサ航跡をネットワークに流すことにより、センサ観測情報を全て出力する従来方式に比べネットワークに流すデータ量を低減させる。センサ側において、送信判定処理部1107により、自律的に自センサの再追尾センサ航跡が融合航跡の航跡精度に寄与するか否かによりネットワークに送信するか否かの送信判定を行い、寄与する場合のみ、再追尾センサ航跡を伝送することにより、必要最小限のネットワーク通信容量で、融合航跡の追尾精度を確保する。
(もっと読む)
レーダ制御装置、該装置に用いられるレーダ監視覆域設定方法及びレーダ監視覆域設定プログラム
【課題】限定された数のレーダを用いて多数の目標を探知する場合に、目標の出現が予想される地点が効率的に含まれるようにレーダの監視覆域を設定するレーダ制御装置を提供する。
【解決手段】監視覆域候補計算手段20により、目標予想点情報fcに対してレーダR1 ,R2 毎に階層的クラスタリングが行われ、クラスタリング結果のクラスタからレーダR1 ,R2 の監視覆域の組合せの候補caが算出される。監視覆域組合せ計算手段30により、監視覆域の組合せの候補caの中から、一方のレーダで探知され、かつ他方のレーダで探知されない目標予想点が探知される監視覆域から優先的に漸次決定することにより、レーダR1 ,R2 の監視覆域が算出される。最急降下法計算手段40により、監視覆域組合せ計算手段30で算出された全てのレーダの監視覆域に対応するパラメータを初期値として、最急降下法を用いて評価関数の値が最大となる監視覆域のパラメータmaが算出される。
(もっと読む)
物体検出装置
【課題】路側物近傍を走行する車両の位置を正確に検出する。
【解決手段】物体検出装置1は、車両に搭載され、レーダセンサからなる第1センサ24とは相違するセンサである第2センサ21〜23を介して、該車両の周囲に存在する物体を検出する路側物検出部11と、路側物検出部11によって路側物が検出されているか否かを判定する判定部12と、判定部12によって路側物が検出されていると判定された場合に、第2センサ21〜23を介して、前記路側物の位置情報を取得する位置取得部13と、位置取得部13によって取得された前記路側物の位置情報に基づいて、第1センサ24を介して、前記路側物の近傍を走行する他の車両を検出する車両検出部14と、を備える。
(もっと読む)
目標追尾装置
【課題】複数のn次元角度センサと目標との交会角が小さな場合でも、追尾安定性を向上させた目標追尾装置を得る。
【解決手段】目標の追尾維持処理開始時の初期値算出にあたって、目標との仮説距離を用いた第1の追尾維持処理と、交会法により算出された距離を用いた第2の追尾維持処理とを並行して動作させ、それぞれの処理で目標航跡を取得しながら、それぞれの目標航跡に対する事後確率を算出し、この事後確率に基づいて2つの目標航跡を選択/統合した統合航跡を継続取得することによって目標の追尾を維持する。
(もっと読む)
距離計測システム及び距離計測方法
【課題】複数地点に存在するレーダで同一のターゲット(目標物体)を追跡する場合に、受信障害が発生しない距離計測システムを提供する。
【解決手段】レーダ制御手段(たとえば、測距装置30)により、測位衛星51,52,53,54から発射された測位信号w13,w23,w33,w43が受信され、同測位信号に含まれる時刻情報に基づいて、設定された遅延時間の経過後に放射タイミングtw3 がレーダアンテナ21に与えられる。測距装置40により測位信号w14,w24,w34,w44が受信され、同測位信号に含まれる時刻情報に基づいて、測距装置30と異なる値に設定された遅延時間の経過後に放射タイミングtw4 がレーダアンテナ22に与えられる。そして、レーダアンテナ21,22により、放射電波wa,wmが、放射タイミングtw3 ,tw4 に同期して放射されると共に、物体Pからの反射電波wb,wnが受信される。
(もっと読む)
センサ制御装置
【課題】複数の近接目標の追尾における相関性能を向上するためのセンサ制御を行う。
【解決手段】複数センサから得られる観測値を追尾処理し目標航跡を生成する際使用センサを決定するセンサ制御装置であって、複数の相関仮説を生成しながら目標航跡と観測値の相関を決定する相関決定部11、対応付けられた観測値を用い各航跡の運動諸元を計算するフィルタ処理部12、相関決定状況からセンサ制御を実施するべきか否か判定するセンサ制御要否判定部21、センサ制御を実施するべきと判定された場合に相関決定部が生成した航跡相関行列から競合を解消すべき航跡群を抽出する競合航跡抽出部22、競合を解消すべき航跡群の誤差共分散行列よりセンサの観測方向の誤差を算出する誤差楕円重なり計算部23、算出されるセンサの観測方向の誤差に基づいてセンサの観測方向の重なりを解消するセンサの選択とセンサ使用回数の決定を行う使用センサ決定部24を備える。
(もっと読む)
軸調整装置及び方法
【課題】複数個の測距手段を搭載する車両用の軸調整施設の省スペース化を図ること。
【解決手段】軸調整用施設内に設けられ、移動体に搭載される測距手段の軸調整を行う軸調整装置であって、少なくとも2つ以上の測距手段が搭載される移動体を載せるテーブルと、前記テーブルを水平面内で移動可能に支持するテーブル可動機構と、前記テーブル可動機構を駆動制御するテーブル制御手段と、前記測距手段と位置合わせされる軸調整用の基準点を提供し、軸調整用施設内に実質的に固定される基準点構成部材とを備え、前記テーブル制御手段は、一の測距手段が前記基準点構成部材と位置合わせされた状態で該一の測距手段の軸調整処理が行われた後に、前記テーブル可動機構を介して前記テーブルを移動させ、他の測距手段が同基準点構成部材と位置合わせされた状態を形成することを特徴とする。
(もっと読む)
障害物検出装置
【課題】他の車両の装備に依存せず、自車両の走行の障害となる可能性のある障害物を適切に検出することができる障害物検出装置を提供する。
【解決手段】方位分解能の高いFMCWモードでの物体検知により直視物体が検知された場合に、直視物体の背後の物体背後領域を含むパルス検知領域を設定し、このパルス検知領域を対象として距離分解能の高いパルスモードでの物体検知を行う。
(もっと読む)
情報処理装置、情報入手装置、情報統合装置、制御装置および物体検出装置
【課題】 情報処理装置の設計変更を容易にし、かつ汎用性を向上させる。
【解決手段】 車載される情報処理装置1において、車両周囲の被検知空間を区切った区画である複数のピクセルが設定されている。1台以上のセンサ部11は、被検知空間内の状況に関する検知情報DSを取得する。パラメータ変換部12は、センサ部11毎に、検知情報DSに基づいて、各ピクセル内の物体に関する第1パラメータを求めて各ピクセルに付与する。パラメータ統合部15は、ピクセル毎に、ピクセルに付与された第1パラメータを統合し、統合結果である第2パラメータを該ピクセルに付与する。処理実行部25は、全ピクセルの第2パラメータから成る統合情報MD2、または該統合情報MD2に基づく制御用情報DCを用いて、車両の制御に係る適応業務処理を行う。これによって、センサ部11の組合せに関わらず、情報統合のための処理が共通化される。
(もっと読む)
降雨レーダ合成処理装置
【課題】精度を高めることができる降雨レーダ合成処理装置を提供する。
【解決手段】降雨レーダ合成処理装置1は、Xバンドレーダ51の測定領域53を複数のセクタ方向と複数のレンジ方向とに分割した各メッシュMEs,rの平均受信電力Prを算出する初期設定部2と、平均受信電力Prに基づいて、減衰補正項を算出する減衰補正項算出部4と、各セクタにおいて、減衰補正項KIRが基準値KIRstよりも大きいメッシュMEs,rのうち、Xバンドレーダ51に最も近いメッシュのレンジ番号rを減衰開始レンジ番号rstと決定するとともに、平均受信電力Prが閾値ThPrよりも小さいメッシュのうち、Xバンドレーダ51に最も近いメッシュのレンジ番号rを減衰開始レンジ番号rstと決定する複合減衰判定処理部7と、減衰開始レンジ番号rstに基づいて、降雨データを合成する合成処理部10とを備えている。
(もっと読む)
ネットワークレーダシステム
【課題】 より信頼性の高い、目標追尾が行えるネットワークレーダシステムを得ること。
【解決手段】 目標の追尾に割り当てられているレーダと別の切替先レーダとの覆域が離れている場合、レーダ制御部を介して切替先レーダの探知テスト部を制御し、ビーム照射テストを実行させ、ビーム照射テストの結果、S/N比が所定の閾値以上のときは、レーダ制御部に目標を追尾するレーダを切替先レーダに切り替えさせ、ビーム照射テストの結果、S/N比が所定の閾値未満のときは、切替先レーダを除く複数のレーダの覆域や目標の探知状況から算出した目標の予測軌道から目標の追尾を実行させる新たな切替先レーダを割り当てるため、追尾レーダ割当計画を追尾レーダ割当計画算出部に再算出させ、レーダ制御部に目標を追尾するレーダを新たな切替先レーダに切り替えさせる追尾レーダ割当評価部を備える。
(もっと読む)
三次元位置推定システム、及び、ダイポールアレイアンテナ
【課題】 精確に受信波の到来方向の推定を行うことが可能なダイポールアレイアンテナ、及び、当該ダイポールアレイアンテナを用いて地中の詳細な三次元位置情報を得ることのできるボアホールレーダシステムを提供する。
【解決手段】 給電線とアンテナ素子間の干渉、或いはアンテナ素子間の共振の影響により受信波の到来方向の推定が困難な第1及び第2周波数帯域と、受信波の到来方向の推定が可能な第3周波数帯域とを有するダイポールアレイアンテナを用いて、当該ダイポールアレイアンテナによる受信波の時間領域波形のうち第1及び第2周波数帯域に係る成分を帯域通過フィルタにより取り除く処理をおこない、当該フィルタ処理後の時間領域波形を解析することにより受信波の到来方向の推定を行う。
(もっと読む)
物体検出装置および物体検出方法
【課題】レーダ装置が検出した物体を精度良くグループ化することのできる物体検出装置および物体検出方法を提供する。
【解決手段】物体検出装置は、車両周辺の物体を検出することによって得られた捕捉点を示す信号を用いて、当該捕捉点それぞれの移動方向を算出する移動方向算出手段と、予め検出対象となる物体の形状に応じた枠および当該物体で想定されている進行方向として当該枠に進行基準方向を設定し、上記捕捉点のうち、上記移動方向に当該進行基準方向を合わせた当該枠内に存在する捕捉点を同じ物体の捕捉点として判定する判定手段とを備える。
(もっと読む)
状況表示装置
【課題】多数の目標の状況を正確かつ迅速に把握することを可能とする。
【解決手段】第1の座標変換手段により、観測したセンサ中心空間の座標を地球中心空間の座標に変換し地球中心座標記憶手段に記憶し、目標の位置を管理する目標リストを用いて、航跡管理手段により、異なるセンサにより得られた複数の観測値および異なる時刻に得られた複数の観測値を地球中心空間の座標と比較して同一の目標に対応するかを判定し、判定結果に基づき目標の位置情報を更新し、第2の座標変換手段により、記憶された地球中心空間の座標をスクリーン座標に変換してスクリーン座標記憶手段に記憶し、画像生成手段により、目標のリストに基づいてスクリーン座標記憶手段から所定の目標座標情報を読み出し、当該読み出した座標の位置に目標を表すシンボルの画像を生成する。
(もっと読む)
センサ装置、入力装置及び制御方法
【課題】非接触で検出対象の多次元的な動きを検出することが可能なセンサ装置、これを備えた入力装置及び制御方法を提供する。
【解決手段】本発明の一形態に係るセンサ装置10は、アンテナパネル11と、発振回路12と、測定回路13と、演算回路14と、制御コマンド生成回路15とを有する。アンテナパネル11は、X方向及びY方向に配列された複数のアンテナ部111X、111Yを有する。発振回路12は、上記複数のアンテナ部と検出対象との間の距離に応じて異なる発振周波数を有する検出信号を出力する。測定回路13は、上記検出信号の周波数変化を測定する。演算回路14は、上記測定回路13によって測定された検出信号の周波数変化に基づいて、上記複数のアンテナ部の各々と上記検出対象との間の距離と、X、Y方向に沿った検出対象の動きに関する量とを算出する。
(もっと読む)
41 - 60 / 207
[ Back to top ]