
Fターム[5J070BD01]の内容
レーダ方式及びその細部 (42,132) | 組合せ (788) | 一次レーダと一次レーダ (279)
Fターム[5J070BD01]の下位に属するFターム
バイ又はマルチスタチックレーダ (72)
Fターム[5J070BD01]に分類される特許
61 - 80 / 207
レーダシステム、及び移動体
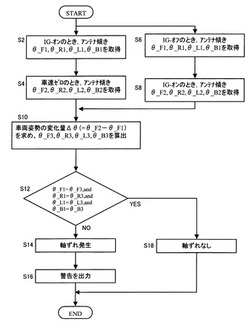
【課題】 車体の傾きを検知する手段を特に設けなくても、レーダシステムにおけるレーダ装置の軸ずれを検出する。
【解決手段】 車両に搭載されるとともに地軸に対するアンテナの傾きを検出するセンサを有し、前記傾きが基準角度になるように調節される複数のレーダ装置と、前記レーダ装置相互で前記傾きの変化量が一致するか否かを判定し、前記変化量が一致しないときには警告出力を行う制御部とを有するので、移動体にその傾きを検知するセンサを設けなくても、レーダシステムに含まれるレーダ装置の軸ずれを検出することができる。
(もっと読む)
位置検出装置、位置検出方法及び位置検出プログラム

【課題】簡単な構成により効率的にRFIDタグの位置を特定することを目的とする。
【解決手段】読取部11は、複数のタグリーダの各タグリーダにより、IDタグからタグ情報を読み出すための読取信号であって所定の形状に広がる読取信号を、出力強度を変えながら前記所定の領域内へ順次放射して、前記IDタグからタグ情報を読み出す。そして、位置検出部12は、読取部11がIDタグからタグ情報を読み出した場合の読取信号の出力強度と、どのタグリーダが前記タグ情報を読み出したかとからIDタグの位置を検出する。
(もっと読む)
衝突直前状態を検出する確認センサを含むセンサシステム
本発明に関する少なくとも1つの実施形態において、自動車の衝突直前状態を検出するセンサシステムが提供される。センサシステムは、差し迫った衝突の激しさおよびその衝突までの残り時間の所見を提供する主レーダ装置を含む。確認センサを含む別個の確認検出装置は、確認出力を供給するために自動車に隣接する近場のスペース内を検出する。この主レーダ装置および確認検出装置と通信するのは、電子制御装置である。この装置は、主レーダ出力および確認検出出力の評価に依存して、安全装置に対する展開信号を発生するように構成される。 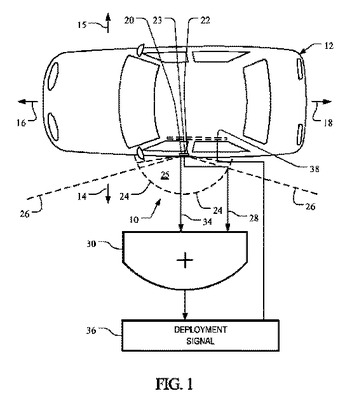 (もっと読む)
(もっと読む)
測位システム及び処理装置
【課題】電波の見通し環境が得られない空間において、センサ、無線タグ、通信端末装置等が取り付けられていない移動物体の位置を測定する。
【解決手段】処理装置は、端末装置が取り付けられた第1の移動物体による受信波形の第1の解析結果と前記端末装置の位置とを対応付けてデータベース装置に記録し、端末装置等が取り付けられていない第2の移動物体による受信波形を得た場合は、該受信波形の第2の解析結果とデータベース装置に記録された第1の解析結果とを比較し、該当する結果を得た場合の端末装置の位置を第2の移動物体の位置として出力する。
(もっと読む)
検出装置および方法、並びにプログラム
【課題】他のレーダ測定装置が近傍に存在するような環境においても、混信による影響を低減できるようにする。
【解決手段】送信部11は、周波数切替部32を制御して1周期ずつランダムな周波数のCW信号を発生させることで、ランダムな間隔で切替信号を発生させ、2種類の周波数の電波を、切替信号に基づいて、交互に切替えて送信する。受信部12は、送信された送信信号としての2種類の周波数の電波のうち、反射されてくる2種類の周波数の電波を、切替信号に基づいて、切替ながら受信し、受信した2種類の周波数の電波より受信信号を生成する。衝突予備動作用信号処理部13は、受信信号を、所定時間の間でサンプリングすることにより、物体を検出する。本発明は、車両安全装置に適用することができる。
(もっと読む)
物体検出装置
【課題】死角を減少させて、自車両の周辺のターゲットを、簡易な構成で検出することができる物体検出装置を提供する。
【解決手段】物体検出装置は、当該車両の外部に向けた第1の検出範囲内の物体を検出する第1レーダと、上記車両における上記第1レーダと異なる位置に搭載され、当該車両の外部に向けた第2の検出範囲内の物体を検出する第2レーダと、上記第1レーダの検出結果および上記第2レーダの検出結果に基づいて、検出された物体が上記車両に衝突する危険性を判断する判断手段とを備える。また、上記第1レーダおよび上記第2レーダは、当該第1の検出範囲の中心軸と当該第2の検出範囲の中心軸とが上記車両の外部でねじれるまたは交わる位置関係で上記車両に搭載される。
(もっと読む)
飛しょう体誘導システム
【課題】 発射後、目標を捜索、捕そくし、目標に向かって誘導する飛しょう体の場合、地上・車両・艦船・航空機等に搭載された誘導管制装置からの目標情報の誤差により、飛しょう体の目標に対する捕そく性能を低下させていた。また、他のシステムのレーダ装置を利用する場合には、他システムセンサの目標に対するバイアス誤差、遅れ時間などにより、更に、目標に対する捕そく性能を低下させていた。
【解決手段】 他システムのレーダ装置を含む各装置の位置誤差、遅れ時間等の推定値に基づき、バイアス誤差を推定することにより、バイアス誤差を除いた目標位置を推定し、シーカの捜索方向を指示することにより、目標に対する捕そく性能を確保するようにした。
(もっと読む)
レーダビデオ処理装置
【課題】非同期でフォーマットの異なる複数のレーダから入力するビデオ信号を容易に合成する処理装置を提供する。
【解決手段】複数のレーダ2a,2bから入力するレーダビデオ信号を同期させるリードイネーブル信号、複数のレーダビデオ信号のフォーマットを統一させるライトイネーブル信号を出力する制御手段14と、入力レーダビデオ信号をメモリ121a,121bに書き込み、リードイネーブル信号の読み出し要求に従って、他のレーダから入力したレーダビデオ信号と同期させるタイミングでメモリ121a,121bから読み出す入力信号処理手段12a,12bと、読み出されたレーダビデオ信号を、ライトイネーブル信号の書き込み要求に従って統一フォーマットに変換してメモリ131a,131bに書き込み、新たなレーダビデオ信号をメモリ131a,131bから読み出す出力信号処理手段13a,13bを設けた。
(もっと読む)
レーダ情報伝送システム及びそのためのレーダ装置
【課題】複数のレーダ装置の間でのレーダ情報の伝送システムにおいて、情報伝送のための通信装置を設けることなく、レーダ情報を伝送し、レーダ装置間で情報を共有すること。
【解決手段】第1パルスレーダ装置Aからパルス電波に物標情報に基づく通信データを重畳して形成された通信データ重畳電波を送信し、第2パルスレーダ装置Bで通信データ重畳電波に含まれる物標情報を取得することにより、情報伝送のための通信装置を設けることなく、レーダ装置間で情報を共有する。
(もっと読む)
車載レーダ装置および電波干渉防止プログラム
【課題】処理負荷を高めることなく電波干渉を防止することが可能な車載レーダ装置、および、電波干渉防止プログラムを提供すること。
【解決手段】電波を対象物に向けて送信する送信手段と、送信手段が送信した電波が対象物で反射された反射電波を受信するための受信手段と、自車両運転者が危険を認知したことを判定するための危険認知判定手段と、自車両運転者が危険を認知したと危険認知判定手段が判定したとき、送信手段からの電波の送信を停止する電波送信停止手段とを備える。
(もっと読む)
レーダー装置の軸調整方法および軸調整装置
【課題】車両に備えられた複数のレーダー装置各々の基準軸を正しく調整可能とするレーダー装置の軸調整方法を提供することを目的とする。
【解決手段】電磁波を送出し、当該電磁波の反射波を受信して、物体の位置情報を取得するレーダー装置を複数搭載した車両において、レーダー装置各々の軸を調整するレーダー装置の軸調整方法であって、複数のレーダー装置のうち何れか1つのレーダー装置を調整対象レーダーとして選択し、当該調整対象レーダー以外のレーダー装置を非調整対象レーダーとして区別するレーダー選択工程と、調整対象レーダーの軸を調整する調整工程とを含み、調整工程において、少なくとも調整対象レーダーを調整している間、非調整対象レーダーの電磁波の送出状態を変更する、レーダー装置の軸調整方法。
(もっと読む)
飛行体捕捉システムおよび飛行体捕捉方法
【課題】 従来よりも容易・迅速にステルス化された目標を捕捉し得る飛行体捕捉システムを提供することを目的とする
【解決手段】 本発明に係る飛行体捕捉システムは、飛行体が飛行することにより発生する飛行機雲を捕捉する飛行機雲レーダ装置と、飛行する飛行体を捕捉する捜索レーダ装置と、前記飛行機雲レーダ装置により飛行機雲が捕捉され、かつ前記捜索レーダ装置により飛行体が捕捉されない場合に前記飛行機雲を発生する飛行体がステルス飛行体であると判断するステルス飛行体判断装置とを具備することを特徴とする。
(もっと読む)
レーダー装置の軸調整方法および軸調整装置
【課題】低コストで車両に備えられた複数のレーダー装置の基準軸を各々調整可能とするレーダー装置の軸調整方法を提供することを目的とする。
【解決手段】車両に搭載されたレーダー装置の軸調整方法であって、車両に搭載された第1のレーダー装置の物体検出可能エリアと当該車両に搭載された第2のレーダー装置の物体検出可能エリアとの重複エリアに軸調整用のターゲットを1つだけ配置するターゲット配置工程、第1のレーダー装置および第2のレーダー装置によって、当該第1のレーダー装置および当該第2のレーダー装置から見たターゲットの方向をそれぞれ検出するターゲット方向検出工程、および、ターゲット方向検出工程の検出結果にもとづいて第1のレーダー装置および第2のレーダー装置の軸調整を行う調整工程を備える、レーダー装置の軸調整方法である。
(もっと読む)
レーダシステム
【課題】内部のセンサから入力される情報に加え、外部から入力される情報を統合して表示し、優れた拡張性を有するレーダシステムを提供する。
【解決手段】内部センサ3と、外部から入力される情報を受け付ける外部入力インタフェース部2と、内部センサ3および外部入力インタフェース部2から入力される情報を蓄積するコンタクトデータベース4と、コンタクトデータベース4に蓄積された情報を表示する表示端末5とを備え、コンタクトデータベース4は、内部センサ3および外部入力インタフェース部2から入力される情報に基づいた個別テーブルを蓄積する複数の個別データベース42,43と、複数の個別データベース42,43に蓄積された個別テーブルを結合して結合テーブルを生成するテーブル結合処理部41と、テーブル結合処理部41において生成された結合テーブルを蓄積する結合データベース44を備える。
(もっと読む)
レーダ装置およびその表示制御方法およびプログラム
【課題】複数の空中線を有するレーダ装置において、操作員による監視を容易にし、目標の探知を見落とす危険性を低くする。さらに高速で移動する複数の目標の位置をリアルタイムに表示させる。
【解決手段】第1、第2、・・・、第Nのレーダ系統から出力された第1、第2、・・・、第Nの表示用信号の距離データを、検出された目標が互いに異なる距離となるように変換した第1、第2、・・・、第Nの距離データ変換信号を出力する距離データ変換手段と、距離データ変換手段から出力された第1、第2、・・・、第Nの距離データ変換信号の角度データを、互いに同一角度となるように変換した第1、第2、・・・、第Nの角度データ変換信号を出力する角度データ変換手段とを備える。
(もっと読む)
同一航跡判定装置
【課題】仮説生成前に同一性を判定できる見込みを推定し、見込みのあるものに対してのみ計算を実行することにより、計算機資源を有効利用し、単位時間に多くの相関結果を出力することができる同一航跡判定装置を得る。
【解決手段】従来の同一航跡判定装置の尤度算出部9に仮説生成判定部10を取りつけ、仮説生成判定部10が、仮説生成を行う前に信頼度の大きな仮説を2つ事前に抽出し、仮説が絞り込めないときに抽出した仮説の比が一定値以上となることを利用して仮説生成の有無を判定し、仮説が絞り込める可能性のある場合には、仮説生成部11に仮説の生成を行わせ、仮説が絞り込める可能性がない場合には、仮説生成部11に仮説の生成を行わせない。
(もっと読む)
レーダ装置
【課題】 レーダ部における個々の周波数帯域や観測する角度を制御して、任意の周波数帯域を選択可能なレーダ部を使用した場合においても、目標の推定姿勢及び各レーダ部の使用可能帯域から各レーダ部の空間周波数領域上の観測領域を算出し、空間周波数領域での所望の信号領域を観測する新規なレーダ装置を提供すること。
【解決手段】 リソース管理部から出力される各レーダ部の観測可能な方位・時間・送信周波数・周波数帯域から目標姿勢推定処理部が推定した目標が観測された時刻以降の所定の時刻毎に前記目標の姿勢と前記各レーダ部とのアスペクト角をそれぞれ算出し、観測条件算出部に入力された観測条件を満たす空間周波数領域上の信号領域である要求領域に対し、目標の姿勢となすアスペクト角が一致するレーダ部の観測領域の割り当てを決定し、この割り当てに基づいて複数のレーダ部に目標を観測させる観測計画算出部とを備えたことを特徴とする。
(もっと読む)
位置検出システム
【課題】海洋上においても送信機の位置を正確かつ確実に検出し得る位置検出システムを提供する。
【解決手段】互いに異なる位置に設置されると共に海洋に向けて出力したレーダ信号S2および受信した反射信号S3に基づいて海洋における表層海流の状態を測定する海洋レーダ2A,2Bと、海洋レーダ2A,2Bに通信回線を介して接続されて海洋レーダ2A,2Bによって測定された表層海流の状態に基づく処理を含む所定の処理を実行する基地局3とを備え、海洋レーダ2A,2Bは、海洋上の送信機1から送信された救助信号S1を受信可能に構成されると共に、受信した救助信号S1の発信方位を特定して発信方位を示す方位データD1を出力可能に構成され、基地局3は、海洋レーダ2A,2Bから出力された方位データD1に基づいて救助信号S1の発信位置を検出する位置検出処理を実行する。
(もっと読む)
レーダ装置
【課題】
カメラを用いずに、自車の前方に存在する二台の車両の中間地点に車両が存在している、という誤検知を回避することを目的とする。
【解決手段】
レーダシステムは、自車左前方に設置された第1のレーダ装置と、自車右前方に設置された第2のレーダ装置と、を備え、前記第1及び第2のレーダ装置は、それぞれ、前方に存在する複数の物体を分離して検出するための分解能の間隔をおいて設置される。第1及び第2のレーダ装置の電波照射範囲は、それぞれ、自車の走行路上で重複し、かつ、左右の隣接車線路上で重複しないように調整されてもよい。又、第1のレーダ装置の電波照射範囲から得られる検出結果、及び、第2のレーダ装置の電波照射範囲から得られる検出結果との差異に基づいて、自車の前方に存在する複数の物体を分離して検出してもよい。
(もっと読む)
車両用走行安全装置
【課題】複数のレーダ装置を設けた場合に生じる不検知領域に物体が存在すると予測される場合に、接触回避効果を高める。
【解決手段】送受信手段が複数備えられており、回避支援手段は、自車前方の領域であって一の送受信部の検知領域および他の送受信部の検知領域間の不検知領域に外挿部により外挿された制御対象物体が存在する場合には(ステップS14:Yes)、不検知領域以外に外挿部により外挿された制御対象物体が存在する場合の作動内容(ステップS8)よりも、接触回避効果の高い作動内容(ステップS11)を設定する。
(もっと読む)
61 - 80 / 207
[ Back to top ]