
Fターム[5J070BD01]の内容
レーダ方式及びその細部 (42,132) | 組合せ (788) | 一次レーダと一次レーダ (279)
Fターム[5J070BD01]の下位に属するFターム
バイ又はマルチスタチックレーダ (72)
Fターム[5J070BD01]に分類される特許
81 - 100 / 207
追尾装置及びプログラム及び追尾方法

【課題】複数の異なるセンサ装置が目標を観測した結果に基づいて、目標を追尾する。
【解決手段】トラック記憶部181は、複数のセンサ装置それぞれが観測した目標に関する情報を表わす複数のトラックデータを記憶する。トラック記憶部181が記憶したトラックデータが更新された場合、優先度算出部141は、更新されたトラックデータの優先度を算出する。共通データ更新部144は、優先度算出部141が算出した優先度が高い場合に、更新されたトラックデータを、共通データ記憶部182に共通データとして記憶させる。
(もっと読む)
センサ統制システム

【課題】探知覆域の組合せ数が増大した場合でも計算機リソースの制限を考慮して探知覆域の最適化処理の高速化および効率化を図る。
【解決手段】探知覆域算出部は、同一センサに対する各探知性能値テーブルのメッシュ配列を分割した各ブロックにおける所定位置の1メッシュのみを対象として各テーブルの探知性能値を加算し、全センサにおいて加算値が最良のメッシュを持つセンサを選択し、当該センサにおいて、最良メッシュを含む近傍の複数メッシュを対象として対応する各テーブルの探知性能値をそれぞれ加算し、その加算値が最良なメッシュを選択してそのメッシュの方位・仰角を当該センサの探知覆域の方位・仰角と決定し、決定した方位・仰角に基づいて該当センサの距離覆域を算出し、算出した距離覆域と決定した方位・仰角に基づいて該当センサの覆域形状を算出する。
(もっと読む)
レーダ統制システム
【課題】 目標物の事前情報とレーダ装置の性能や設置場所を基に、複数のレーダ装置の割当を設定するレーダ制御パラメータの最適値候補を算出するレーダ統制システムを提供すること。
【解決手段】 状況入力手段により入力されたレーダ制御傾向、目標状況、電波環境状況、レーダ配備状況の組合せに応じた複数のレーダ装置の目標に対する割当スケジュールを算出する際に用いる、最適な複数の各制御パラメータを算出する算出手段と、状況入力手段により入力されたレーダ制御傾向、目標状況、電波環境状況、レーダ配備状況と算出手段により得られる複数のレーダ装置のスケジュールを算出する際に用いる各制御パラメータと各制御パラメータを用いた場合の結果評価値とを記憶する記憶手段と、算出手段により算出された各制御パラメータより得られる評価結果を解析し、その評価結果から最適な制御パラメータの組合せを少なくとも一つ算出する解析手段とを備える。
(もっと読む)
センサ情報融合装置
【課題】2D角度観測値を用いた距離推定値初期値と距離変化率推定値初期値の高精度化、2D角度観測値を用いたバッチ処理後の距離推定値と距離変化率推定値の高精度化を可能にする。
【解決手段】センサによる2D角度観測情報に基づいて2D角度航跡を算出する2D角度追尾手段と、2D角度観測情報と2D角度航跡について事前設定された圧縮間隔に基づいて最小2乗統合により圧縮処理して統合2D角度観測情報を算出する2D角度観測情報圧縮手段と、3点の統合2D角度観測情報に基づいて距離推定値初期値および距離変化率推定値初期値を算出する距離推定値初期値算出手段と、上記算出初期値を初期値として、2D角度観測情報を事前に設定したバッチデータ数分蓄積してバッチ処理して距離推定値および距離変化率推定値を算出する距離算出バッチ処理手段を備える。
(もっと読む)
レーダ装置、及び物標検出方法
【課題】物標のX座標の変位量が大きい場合があっても、高い確度で物標の位置の連続性が維持されるように物標の位置の推定を行う。
【解決手段】物標の位置が検出されないスキャンでは、当該物標の過去の軌跡がY軸付近の所定領域に含まれる場合は、前回の位置のX座標から、前記軌跡より推測されるX座標に第1の変位量さらに変位したX座標を有する位置を推定位置とし、前記軌跡が前記所定領域に含まれない場合は、前回の位置のX座標から、前記軌跡より推測されるX座標に第1の変位量より大きい第2の変位量さらに変位したX座標を有する位置を推定位置とする。
(もっと読む)
位置方向推定システム、情報処理装置、位置方向推定方法、プログラム、及び記録媒体
【課題】公共交通機関のユーザが痴漢等の迷惑行為の加害者として巻き込まれることを防止するとともに、加害者として巻き込まれた際には冤罪立証の証拠を確保することが可能な位置方向推定システムを提供する。
【解決手段】ユーザの手に装着された複数の被測定手段、被測定手段との距離を測定する測定手段、及び情報処理装置から構成される位置方向推定システムであって、情報処理装置は、測定手段に対して測定開始と測定終了の命令を出力する命令出力手段と、測定手段とそれぞれの被測定手段との距離を測定手段から取得し、ユーザの掌の位置及び向きを算出する処理手段と、を有する。
(もっと読む)
受信機ネットワークを用いた複数の物体の位置特定
送信機によって放出され、物体によって複数の受信機に反射される信号を処理することによって複数の物体の正しいロケーションを求めるための技法を説明する。角度情報も高度情報も使用されない。物体−受信機対の到達時間差測定値を作成して、各物体から各受信機−受信機対において受信された信号間の到達時間差を計算する。次に、双曲線の位置特定を実施して、物体毎の可能なロケーションを識別する。受信機−物体対毎に直接・反射信号受信時間測定値を作成して、送信機からの直接信号の受信機による受信と、物体によって反射された信号の受信機による受信との時間差を計算する。直接・反射信号受信時間測定値は、物体−受信機対の到達時間差測定値に関連付けられ、その結果を使用して、双曲線の位置特定によって求められたロケーションを直接・反射信号受信時間測定値に関連付けることによって、正しい物体位置を識別する。 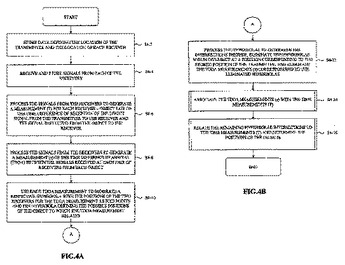 (もっと読む)
(もっと読む)
車両のためのモノスタティック・マルチビームレーダセンサ装置
本発明は、少なくとも1つの送信/受信チャネル(TX)及び少なくとも1つの受信チャネル(RX)を有するアンテナ装置(3)の指向特性と、少なくとも1つの受信チャネル(RX)のために少なくともほぼ絶縁型の混合器を有する混合器システム(4)と、を備える、車両のためのモノスタティック・マルチビームレーダセンサ装置に関する。少なくともほぼ絶縁型の混合器は、ギルバートセル型混合器(9)を有し、ギルバートセル型混合器(9)は、局部発振器信号(LO)の入力と、対応する受信チャネル(RX)との間の非理想的な絶縁によって、当該受信チャネル(RX)を介して、過結合信号(10)によって、アンテナ装置(3)の指向特性に影響を与える送信電力を発し、指向特性は、過結合信号(10)の位相位置の制御により切り替え可能である。 (もっと読む)
レーダシステム
【課題】目標を安定して追尾することが可能なレーダシステムを提供する。
【解決手段】Xバンドのレーダ映像中に偽像又はクラッタが存在し、さらに、各ARPA装置8a、8bが同一の目標をそれぞれ追尾している場合に、追尾部17bの目標追尾部26は、Sバンドの目標の位置を指示機16aに送信し、指示機16aの追尾位置比較部44は、受信した指示機16bからの目標の位置と、追尾部17aの目標追尾部26からのXバンドの目標の位置との差分を求め、前記差分が所定の閾値を上回るときに前記差分を追尾部17aの目標追尾部26に出力する。該目標追尾部26は、前記差分を用いて目標の位置を補正する。
(もっと読む)
無線周波数近接センサ及びセンサ・システム
【課題】車両の死角における物体検知を行い、他の検知システムと干渉しない、近接センサを提供する。
【解決手段】周波数が異なる複数の無線周波数(RF)信号を送信し、反射したRF信号を受信し、中間周波数(IF)信号を送るように、構成される。各IF信号は反射RF信号の1つを代表し、各反射RF信号はセンサの検出領域内の物体によって反射された送信RF信号に対応する。センサは、IF信号を用いて、物体がその検出領域内にあるかどうか及びその移動方向を決定する。
(もっと読む)
観測衛星システム
【課題】 空間航行体に搭載され地上観測を行うレーダ装置から照射される電波ビームの走査範囲を広げ、観測不能領域を狭める。
【解決手段】 太陽電池パドル12により生成された電力をマイクロ波に変換して送電する送電アンテナ9と、レーダ衛星2との間で制御情報および観測情報を授受する衛星間通信装置14を備えた制御衛星2と、レーダ装置1と、自衛星の姿勢角を変更する姿勢角変更機28と、制御衛星2から送電されたマイクロ波を電力に変換するマイクロ波電力変換機22と、マイクロ波電力変換機22からの電力を蓄電するバッテリ23を備えた複数のレーダ衛星1から構成され、各レーダ衛星1は、制御衛星2からの制御情報に基づいて、各レーダ装置1のビーム軸が互いに観測領域内の異なる方向を向くようにレーダ衛星の姿勢角変更機28を制御する。
(もっと読む)
マイクロ波センサ
【課題】侵入者あるいは侵入物の位置を判別可能なマイクロ波センサを提供する。
【解決手段】監視エリアを挟んで対向し、各々に異なる周波数f1,f2の第1、第2のマイクロ波を送受信する第1、第2のマイクロ波送受信機と、正常時における第1、第2のマイクロ波送受信機の各受信信号の強度特性をそれぞれ記憶し、第1、第2のマイクロ波送受信機の各受信信号及び正常時受信強度特性との比較に基づいて侵入位置を判定する判定装置とを具備する。
(もっと読む)
車両
【課題】 誤検出することなく前方の車両や物体を検出できる衝突防止用のセンサを備えた車両を提供すること。
【解決手段】 ゴルフカート10に、追突防止センサと障害物センサ33a等を設けた。追突防止センサは、後方に電波aを発信する送信器31と、前方のゴルフカート10aとの距離が一定距離以内になったときにゴルフカート10aの送信器31から発信された電波aを受信する受信センサ32とからなる。障害物センサ33a等は、電波aの発信距離よりも長い距離に亘って前方に超音波bを発信し、物体に衝突して戻ってくる超音波bを受信することにより前方の物体を検出する。そして、受信センサ32が電波aを受信したときにゴルフカート10は停止し、受信センサ32が電波aを受信せず、障害物センサ33a等が物体を検出したときにゴルフカート10は低速走行するようにした。
(もっと読む)
物体検出装置
【課題】物体情報を格納する際の優先順位を設定することにより、物体検出処理を適切かつ迅速に行える物体検出装置を提供する。
【解決手段】車両の周囲の物体を検出する物体検出装置1であって、物体の車両に対する相対距離及び相対速度についての物体情報を取得し、取得された複数の物体情報を格納するに際し、車両に対し離反する離反移動物の物体情報に対し離反移動物以外の物体の物体情報を優先的に格納する。これにより、制御システムに必要となる物体情報を優先的に格納することができる。このため、制御システムに必要な物体情報を取りこぼすことを低減でき、物体検出処理を適切かつ迅速に行える。
(もっと読む)
物体検出装置
【課題】二つの検知手段の検知結果に基づいてゴースト判定を行うことにより、適切な物体検出が行える物体検出装置を提供すること。
【解決手段】車両2の前方にある物体を検知するレーダ5、及び車両2の前側方にある物体を検知するレーダ3、4を備え、レーダ5により物体をトラッキングしている際にその物体より近距離の位置に他の物体が検知された場合、レーダ3、4の検知結果に基づいて他の物体をレーダ5トラッキングの対象とするか否かを判断して物体検出を行う。この場合、レーダ3、4の検知結果に基づいて他の物体をレーダ5のトラッキングの対象とするか否かを判断することにより、他の物体が大型車の反射などによるゴーストであるか否かを的確に判断することできる。
(もっと読む)
レーダ装置
【課題】複数のレーダ画像の投影面が一致しない場合にも、目標の高分解能画像を生成することが可能なレーダ装置を得る。
【解決手段】複数の異なる位置に配置され、目標を観測する複数のレーダと、複数のレーダで得られる受信信号スペクトルの投影面を一致させる処理を行う投影面補償手段19と、複数のレーダで得られる受信信号スペクトルの位相を一致させる処理を行う相互コヒーレント化手段3と、相互コヒーレント化手段で位相を一致させた受信信号スペクトルを、レンジ方向またはクロスレンジ方向に内挿または外挿して帯域幅を拡張した連続スペクトルを生成する帯域拡張手段4と、帯域拡張手段で生成された連続スペクトルのレンジとクロスレンジをそれぞれ圧縮する圧縮手段5及び6とを備える。
(もっと読む)
物体検出装置および方法、ならびに物体検出装置を備えた車両
【課題】電磁波によってその物体を検出した時点におけるその物体の移動速度および移動方向を求める。
【解決手段】電磁波を送信し物体から反射される電磁波を異なる位置で受信するレーダヘッド201,202と、レーダヘッド201,202から出力される受信信号より少なくとも物体の相対速度および方位を求めるレーダ信号処理部311,312とを有する複数のレーダ装置と、その複数のレーダ装置によって求められる物体の相対速度および方位を用いて、その物体の移動ベクトルを算出する移動ベクトル検出部402とを備える。
(もっと読む)
物体識別装置および物体識別方法、ならびに物体識別装置を備えた車両
【課題】自車両または他車両のレーダ装置等からの電波信号に妨害されること無く、安定に物体放射量の観測を行う。
【解決手段】物体からの電波放射量を検出する複数の電波受信素子204を有する電波イメージング部200と、複数の電波受信素子204からの検出信号より物体の位置等の情報を抽出する放射強度画像生成部300と、特定の周波数帯域内にレーダ装置からの電波送信が観測されると判定された場合に、電波受信素子204の検出信号からその特定の周波数帯域の信号を除いて得られる信号を放射強度画像生成部300に処理させる帯域分波制御部205とを備える。
(もっと読む)
検出装置および方法
【課題】方向検出技術を簡便かつ精度よく実現できるようにする。
【解決手段】速度距離センサ1は、目標物3と自身の間の直線距離を距離R1として検出し、自身の位置における目標物3の相対速度を速度V1として検出する。速度センサ2は、自身の位置における目標物3の相対速度を速度V2として検出する。かかる速度距離センサ1と速度センサ2とを搭載した検出装置は、距離R1、速度V1、および速度V2をパラメータ値として利用して、距離R、距離RR、角度θ3を演算し、角度θ3を目標物の方向として出力し、距離Rまたは距離RRを目標物の距離として出力する。本発明は、レーザレーダによる方向検出技術に適用可能である。
(もっと読む)
目標追尾装置、目標追尾プログラム及び目標追尾方法
【課題】高分解能センサにより同一目標から複数の検出位置を得るセンサシステムにおいて、検出位置の重心位置精度劣化の低減を図るとともに、目標の航跡の高精度化を目的とする。
【解決手段】検出情報決定部120は、複数の検出装置から取得した検出情報の内、1つの検出装置から取得した検出情報に基づき目標の追尾を行うか、あるいは2つ以上の検出装置から取得した検出情報に基づき目標の追尾を行うかを所定の条件に基づき選択する。また、検出情報決定部120は、選択した結果に基づき、目標の追尾に使用する検出情報を決定する。追尾処理部140は、決定された検出情報に基づき目標を追尾する。
(もっと読む)
81 - 100 / 207
[ Back to top ]