
Fターム[5J070BD01]の内容
レーダ方式及びその細部 (42,132) | 組合せ (788) | 一次レーダと一次レーダ (279)
Fターム[5J070BD01]の下位に属するFターム
バイ又はマルチスタチックレーダ (72)
Fターム[5J070BD01]に分類される特許
101 - 120 / 207
航跡統合装置及びプログラム及び航跡統合方法
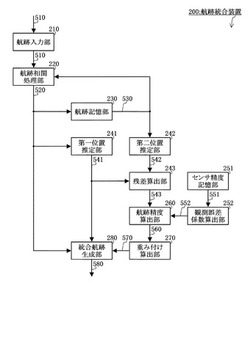
【課題】センサが目標を観測した観測データに基づいて推定した目標の航跡を表わす複数のセンサ航跡データを統合して、精度の高い統合航跡データを生成する。
【解決手段】航跡入力部210は、複数のセンサ航跡データ510を入力する。航跡精度算出部260は、航跡入力部210が入力したセンサ航跡データ510に基づいて、航跡精度評価値を算出する。航跡精度評価値は、センサ航跡データの精度を表わす。重み付け算出部270は、航跡精度算出部260が算出した航跡精度評価値に基づいて、航跡調整係数を算出する。航跡調整係数は、センサ航跡データの重み付けを表わす。統合航跡生成部280は、重み付け算出部270が算出した航跡調整係数に基づいて、センサ航跡データを統合し、統合航跡データ580を生成する。
(もっと読む)
位相同期発振器及びそれを用いたマルチレーダシステム

【課題】与えられた周波数帯域をより効率的に利用することができるマルチレーダシステムを提供する。
【解決手段】周波数が周期的に増減する信号を生成して出力する複数のレーダを含んで構成されるマルチレーダシステムであって、各レーダは、周期的に増減する周波数の上限値及び下限値が各レーダの信号毎に互いに異なり且つ当該上限値及び下限値になるタイミングが各信号毎に互いにほぼ一致するように所定の同期信号に同期して信号を生成し、出力する。これにより、電波干渉を生じさせずに、各信号の周波数間隔を詰めることができ、より多くのチャネルを設定することができる。
(もっと読む)
情報表示装置
【課題】1つの表示画面上に各種情報処理端末から得られた動的な情報をリアルタイムに表示しつつ、ユーザが簡単な操作によって所望の機能選択を実行できる情報表示装置を提供することを目的とする。
【解決手段】表示画面上に表示中のメニュー項目の階層を容易に把握できるようにメニュー項目の内容とともに階層に関する情報100、101を表示し、表示したメニュー項目の選択をロータリーエンコーダなどの回転操作部52を用いて操作するようにした。
(もっと読む)
ロケット追尾レーダ装置
【課題】ロケットから分離した小物体や爆破によるロケットの破片を探知、追尾し、落下範囲を予測可能にする。
【解決手段】分離・爆破判定部がロケットの分離、爆破の状態を表す信号を基に分離、爆破を判定し、閾値制御部が破片データベースの対象の破片情報に基づいて推測したサイズの破片を目標として検出するように目標検出部の検出閾値を変更し、追尾制御部が対象の破片情報に基づいて破片のまとまりを目標として一つの追尾ビームにより追尾できるように追尾部の追尾フィルタの変更し、追尾部は対象の破片情報に基づいて追尾フィルタを変更して追尾処理を行うと共に、破片のまとまりに対する追尾ビームを形成するよう送受信装置を制御し、落下範囲予測部は破片のまとまりに対応した追尾結果データおよび対象の破片情報に基づいて破片の予測落下範囲を算出する。
(もっと読む)
画像レーダ装置
【課題】雑音等の外乱の影響を抑えて補償量を推定し、高分解能なレーダ画像を生成する画像レーダ装置を得る。
【解決手段】複数のレーダ器3により同一の目標を観測して得られる受信信号を合成してレーダ画像を生成する際に、受信信号に基づいて目標の追尾情報を生成する追尾処理部4と、性能要求、レーダ器緒元および追尾情報に基づいて、各レーダ器3の受信信号が空間周波数領域で部分的に重複するように送受信制御パラメータを決定し、重複する空間周波数領域に関する重複領域情報を生成する観測手順計画部2と、追尾情報に基づいて各レーダ器3の受信信号の粗位相補償を行う粗補償処理部5と、重複領域情報に基づいて所定の評価指標を最小化することにより粗補償処理された受信信号の精位相補償を行う精補償処理部6と、精補償後の受信信号を合成し、高分解能なレーダ画像を生成する合成処理部7とを備える。
(もっと読む)
レーダ装置、及び干渉防止方法
【課題】電波干渉を十分軽減したレーダ装置、及び干渉防止方法を提供すること。
【解決手段】レーダ装置10、20は、目標物に対して送信電波を送信しその反射波を受信して目標物を検出する。通信装置30は他車に搭載されたレーダ装置に関するレーダ装置情報と走行情報を受信する。通信装置30は受信したレーダ装置情報等に基づいて、自車と他車とが近接する場合等、一定の送信電波停止条件を満たすときに、レーダ装置10、20から送信電波の送信を停止させる。また、通信装置30は送信電波を停止後、自車と他車とが近接しなくなった場合等、一定の送信電波再開条件を満たすとき送信電波の送信を再開させる。
(もっと読む)
踏切障害物検知装置
【課題】踏切遮断機の遮断桿近傍に進入した人を確実に検知して踏切道における障害物検知の安定性を向上させる。
【解決手段】面検知式センサ5aの検知エリアの端部である遮断桿11近傍の自動車は検知できるが人が検知できないグレーゾーン18にペンシル形状の細いミリ波ビーム12を照射して、遮断桿11の左右のぶれに影響を受けないで遮断桿11の内方近くにいる人を確実に検知して人の検知エリアの死角をなくすとともに遮断桿11やその外方にいる人や自動車を障害物として誤検知することを防ぐ。
(もっと読む)
多センサ処理
多センサ処理の方法は、第1のセンサシステムにおいて、第2のセンサシステムからトラックデータを受信すること、第1のセンサシステムからのトラックデータを第2のセンサシステムからのトラックデータと比較することであって、或る時間期間の間にトラックが第1のセンサシステムの視野内に存在することになるか否かを判断する、比較すること、第1のセンサシステムにおいて、トラックデータに基づいてトラックの予測品質を求めること、及び、当該トラックの予測品質をブロードキャストすることを含む。本方法は、第2のセンサシステムからトラックの予測品質を受信すること、並びに、第1のセンサシステムによって求められたトラックの予測品質、及び第2のセンサシステムから受信されたトラックの予測品質に基づいて第1のタスクのセットを決定することも含む。 (もっと読む)
対象物検出装置
【課題】シングルビーム方式のレーダ装置を用いて車両の周囲に位置する対象物が存在するレーン位置を特定する対象物検出装置を提供する。
【解決手段】検出範囲にある対象物までの距離のみを検出可能なシングルビーム方式の右方レーダ装置4及び左方レーダ装置5を備え、各レーダ装置4、5のパラメータ情報と、車両2の現在位置情報と、車両2が走行する道路の道路形状情報とに基づいて、各レーダ装置4、5により特定のレーン内に位置する対象物を検出可能な対象物存在範囲70、71を算出し、検出した対象物までの距離に基づいて対象物のレーン位置を特定するように構成する。
(もっと読む)
防空システム
【課題】防衛上の弱点を簡易に克服することの可能な防空システムを提供すること。
【解決手段】センサを搭載する飛行船8を目標情報ネットワークシステム1を介して大規模防空システムに組み込む。またセンサを搭載する航空機(要撃機、警戒機5、民間航空機など)も目標情報ネットワークシステム1を介して大規模防空システムに組み込む。さらには気象レーダ4、航空管制レーダ6や民間使用レーダといった固有の防空システムのレーダを、目標情報ネットワークシステム1を介して大規模防空システムに組み込むようにする。その際、中継装置100を用いて各種レーダ固有のフォーマットのデータを目標情報ネットワークシステム1で使用されるプロトコルに変換し、インタフェースを統一することで目標情報を全ての防空単位間で共有できるようにする。
(もっと読む)
空港面監視装置
【課題】2つのレーダの覆域が部分的に重なった重畳エリアで航空機の識別を容易にする空港面監視装置を提案する。
【解決手段】サイトマップ設定手段が、基準点品質信号に基づいて、複数のサイトマップの中から所定のサイトマップを選択し、この選択された所定のサイトマップに基づいて、第1サイトの目標検出信号と第2サイトの目標検出信号に通過エリアを設定し、またサイト選定処理手段が、基準点品質信号に基づいて、第1サイトの目標検出信号と第2サイトの目標検出信号のいずれかを選択する。
(もっと読む)
物体検知方法
【課題】コントローラによる制御が不要で、且つ省資源化も可能な物体検知方法を提供する。
【解決手段】車両1の前部に、発光部と受光部を備えたレーダ装置3L,3Rを左右に配置し、左側のレーダ装置3Lの発光部が発射したレーザ光の反射光を右側のレーダ装置3Rの受光部で受信した後に右側のレーダ装置3Rの発光部がレーザ光を発射し、右側のレーダ装置3Rの発光部が発射したレーザ光の反射波を左側のレーダ装置3Lの受光部で受光した後に左側のレーダ装置3Lの発光部がレーザ光を発射する。
(もっと読む)
探知測距装置および探知測距プログラム
【課題】レーダー等の複数の探知機で求めた相対距離等に基づいて、単純な計算で正確な相対速度ベクトルを求めることができる探知測距装置および探知測距プログラムを提供すること。
【解決手段】送信した電磁波の被探知物体での反射波を受信することにより被探知物体までの相対距離を測定する第一の相対距離測定手段と、第一の相対距離測定手段と異なる位置に配置され、送信した電磁波の被探知物体での反射波を受信することにより被探知物体までの相対距離を測定する第二の相対距離測定手段と、第一の相対距離測定手段によって測定した相対距離と第二の相対距離測定手段によって測定した相対距離とに基づいて、第一の相対距離測定手段から被探知物体に対する方向又は第二の相対距離測定手段から被探知物体に対する方向に対して任意の角度を成して移動している被探知物体の実速度ベクトルを算出する実速度ベクトル算出手段とを備える。
(もっと読む)
単一のセンサによって位置検出するシステム及び方法
物体の位置を決定する、単一のセンサによる位置検出の強化に関する。いくつかの実施形態において、第1の信号が第1のエミッタから放射され、第2の信号が第2のエミッタから放射される。平面はセンサを用いて観測され、第1の信号および第2の信号のそれぞれが物体によって反射されたあと、第1および第2の信号はセンサによって受信される。応答信号が、第1および第2の信号に基づいて生成され、応答信号は平面における物体の位置を決定するために処理される。 (もっと読む)
マルチセンサ制御システム
【課題】種類の異なる複数のセンサを適切に制御して、観測を行う。
【解決手段】センサ200a〜200cが出力した探知データを、データ相関・統合部120が入力し、相関・統合して目標情報を生成する。センサ制御方法決定部150は、センサ情報設定・管理部170が記憶したセンサの能力や、制御ルール設定・管理部180が記憶した制御ルールに基づいて、目標情報からセンサ制御方法を決定する。センサ制御方法決定部150が決定したセンサ制御方法に基づいて、制御コマンド発行部190がセンサ200a〜200cに対して、センサ制御コマンドを送信する。
(もっと読む)
電波妨害システム
【課題】電波妨害装置においては自己の妨害送信状況の確認が実施できず、電波妨害による自己防御の度合いの把握が困難であった。
【解決手段】目標航空機11からのレーダ波14を受信した自機航空機12は、電波妨害信号15を送信すると共に、データリンク3を介して僚機航空機13に対して自機航空機12が送信した電波妨害信号15の受信を指示し、僚機航空機13は指示に基づき電波妨害信号15を受信しその電波諸元を検出して、データリンク3を介して送られた電波妨害信号情報との相関を取ることにより電波妨害信号による妨害状況を判定し、その結果をデータリンク3を介して自機航空機12側に伝送することにより自機航空機側で電波妨害による自己防御の度合いの把握ができるようにした。
(もっと読む)
通過管理システム
【課題】部屋の入退室管理や商品の在庫管理などに使用され、壁の一方側と他方側とに設置される質問器がLF帯の起動信号を発生し、応答器がそれに応答して内蔵電池を電源としてUHF帯の信号で識別情報(ID)を含む応答信号を返信することで、質問器が壁を隔てて一方側から他方側へ通過する前記応答器を検知するようにしたLF帯、UHF帯併用の通過管理システムにおいて、そのような電波式によっても、壁の両側に設置した質問器間の干渉を無くせるようにする。
【解決手段】質問器31,32は、相反動作で前記起動信号を送信する(一方がONのときに他方はOFF)。したがって、安くて使い勝手の良い電波式を用いても、壁の両側にそれぞれ設置される質問器間での干渉を無くすことができる。これによって、それらを近接配置することができ、配線の引き回しなど、施工上の問題を小さくすることができる。
(もっと読む)
センサ移動計画システム
【課題】全ターゲットについて総合的に誤差を小さくするのに適した移動方向を算出できるセンサ移動計画システムを得る。
【解決手段】センサ管理部2は、ターゲットからの信号を受信したセンサから受信波形を獲得する受信波形獲得機能25と、受信波形の観測時刻におけるセンサの位置を獲得する位置情報獲得機能24と、2つのセンサの受信波形を照合してセンサペアのターゲットまでの距離差及び相対速度差を求める受信波照合機能26と、前記距離差及び相対速度差を満たす、ターゲットの観測位置及び観測速度を算出する整合算出機能27とを有し、ターゲット管理部1は、ターゲットの観測位置及び観測速度から将来の時刻におけるターゲットの推定位置及び推定速度を算出する推定機能13を有し、センサ行動算出部3は、各センサについて、位置及び速度誤差改善ベクトルを総合した誤差改善ベクトルを算出し、次の時刻におけるセンサの位置を決定する改善方向決定機能31とを有する。
(もっと読む)
レーダ情報処理装置
【課題】個別レーダは極力小型軽量の装置規模を維持しながら、目標の航跡位置情報の信頼性向上を可能にする。
【解決手段】各レーダと目標との相対距離に応じてS/Nウェイト係数を算出するS/Nウェイト計算部と、各レーダと目標との相対位置に応じて位置ウェイト係数を計算する位置ウェイト計算部と、当該装置の自己位置を標定する自己位置標定部と、スキャンごとに各レーダから受信した目標の位置情報のそれぞれに対して、算出されたS/Nウェイト係数および位置ウェイト係数を乗じ、ウェイト付けされた位置情報を合成し、合成された位置情報を当該装置の自己位置に基づいて絶対的な目標位置に変換する位置計算部を備え、位置計算部で算出された前後のスキャン時の絶対的な目標位置に基づいて追尾処理を行う。
(もっと読む)
アレーアンテナ及びそのビーム制御方法
【課題】低高度な目標に対しても大きい電力で電波を照射することができるアレーアンテナ及びそのビーム制御方法を得る。
【解決手段】送信信号を生成する送信器6と、前記送信信号を分配する分配器3と、分配器3の複数の出力に対して複素荷重をそれぞれ乗じる複数の乗算器2と、複数の乗算器2の出力をそれぞれ送信する複数の素子アンテナ1とが設けられたアレーアンテナであって、推定される目標位置に基づいて目標方向を推定する目標方向推定手段7と、前記目標位置に到達するマルチパス波の送信方向であるマルチパス方向を推定するマルチパス方向推定手段8と、前記マルチパス波が反射する角度から前記マルチパス波の反射係数を推定する反射係数推定手段10と、前記目標方向、マルチパス方向及び反射係数に基づいて複数の乗算器2で乗算する複素荷重を算出する荷重計算手段5とをさらに設けた。
(もっと読む)
101 - 120 / 207
[ Back to top ]