
Fターム[5J070BD01]の内容
レーダ方式及びその細部 (42,132) | 組合せ (788) | 一次レーダと一次レーダ (279)
Fターム[5J070BD01]の下位に属するFターム
バイ又はマルチスタチックレーダ (72)
Fターム[5J070BD01]に分類される特許
121 - 140 / 207
車両用周辺監視装置
【課題】障害物等の不要な誤検出を抑制することが可能な車両用周辺監視装置を提供すること。
【解決手段】自車両前方に延在する所定前方領域内の障害物を監視する前方監視手段と、所定前方領域に比して自車両の側方側に延在する所定前側方領域内の障害物を監視する前側方監視手段と、を備える車両用周辺監視装置であって、自車両が側壁を有する所定道路を走行しているか否かを判定する所定道路走行判定手段を備え、所定道路走行判定手段により所定道路を走行していると判定された場合には、前側方監視手段による監視を抑制することを特徴とする。
(もっと読む)
車両用周辺監視装置

【課題】車両の衝突の回避又は軽減を図るために、車両の前側方の物体を監視する車両用周辺監視装置を提供することを課題とする。
【解決手段】
左前方監視レーダ110は、車両の左前方に検知範囲を有し、右前方監視レーダ120は、車両の右前方に検知範囲を有する。左前方監視レーダ110の検知範囲の中心軸と車両中心軸とのなす第1の角度は、右前方監視レーダ120の検知範囲の中心軸と車両中心軸とのなす第2の角度よりも大きく設定されている。これは左側通行の道路環境用の設定である。PSC・ECU130は、監視部131と設定部132を有する。監視部131は、左前方監視レーダ110と右前方監視レーダ120から受ける検知信号に基づき車両前側部の物体を監視する。設定部132は、車両の仕向国の交通環境に応じて、左前方監視レーダ110と右前方監視レーダ120の検知範囲と車両中心軸との関係を切り換える。
(もっと読む)
車両用周辺監視装置
【課題】車両周辺の障害物をより適切に監視することが可能な車両用周辺監視装置を提供すること。
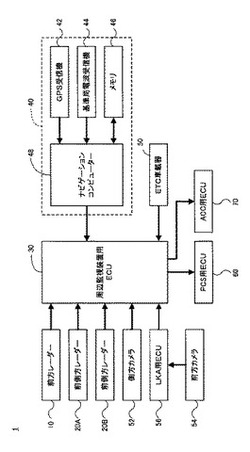
【解決手段】自車両前方に延在する所定前方領域内の障害物を監視する前方監視手段と、所定前方領域に比して自車両の側方側に延在する所定前側方領域内の障害物を監視する前側方監視手段と、自車両の走行環境を検知する走行環境検知手段と、を備え、走行環境検知手段により、高速道路を含む所定道路を自車両が走行中であることが検知された際に、前側方監視手段による監視を抑制する車両用周辺監視装置であって、走行環境検知手段により、所定道路のうち合流部を含む所定領域を自車両が走行中であることが検知された場合には、前側方監視手段による監視の抑制程度を緩和することを特徴とする。
(もっと読む)
センサシステム
【課題】センサのリソースを管理し、複数のセンサを用いて、目標群を効率的に観測するセンサシステムを得る。
【解決手段】センサ1は、検出部4により目標を検出したとき、目標の観測値と関連するセンサ及びリソースの情報を中央情報処理装置2に通知し、中央情報処理装置2は、検出された目標に関する情報を処理し、目標の中央航跡を生成するとともに、生成された中央航跡に関連するセンサ及びリソースの情報をセンサリソース管理部10により管理し、指示器9により中央航跡に対する指示があったときは、センサリソース管理部10により、中央航跡に関連するセンサ及びリソースに対する指示として、該当センサ1のビーム制御部7に通知し、ビーム制御部7によって送受信部3に対してリソースの電波の照射方向を指示するようにした。
(もっと読む)
侵入者検知システム
【課題】より広範囲の監視領域において、より高い精度で侵入者を検知する侵入者検知システムを提供する。
【解決手段】侵入者検知システムであって、既存の電磁波の受信電圧変動を検出する第1の電磁波センサ1と、電磁波を送信するとともに、当該電磁波が物体に反射した反射波の受信電圧変動を検出する第2の電磁波センサ2と、を有し、前記第1の電磁波センサ1は、前記既存の電磁波の受信電圧変動が第1の閾値を超えた場合に、前記第2の電磁波センサ2を起動し、前記第2の電磁波センサ2は、前記反射波の受信電圧変動が第2の閾値を超えた場合に、侵入者を検知したと判定する。
(もっと読む)
侵入者検知システム、および、侵入者検知方法
【課題】より広範囲の監視領域において、より高い精度で侵入者を検知する侵入者検知システムを提供する。
【解決手段】侵入者検知システム1であって、複数の受信アンテナ101a、101bと、 受信した電磁波を検波して電圧レベルに変換する検波手段102a、102bと、電磁波の電圧レベルを測定する電圧測定手段103a、103bと、電磁波の位相を測定する位相測定手段104a、104bと、受信アンテナ各々の電圧レベルおよび位相から電磁波の到来方向を推定して記憶手段106に記憶する推定処理手段105と、記憶手段から所定の時間帯の到来方向を読み出し、到来方向の時間変化の特徴量を演算する演算処理手段107と、到来方向の特徴量が閾値を超えるか否かを判別し、閾値を超える場合に侵入者を検知したと判定する判定手段109と、を有する。
(もっと読む)
ネットワークレーダシステム、レーダおよび中央制御装置
【課題】或るレーダが受け持った追尾目標を他のレーダが探知するのを防ぎ、システム全体としての探知性能の劣化を抑える。
【解決手段】確立除外情報抽出部24により、各レーダの探知覆域を既追尾目標が通過するかどうかを判定して、探知覆域を通過する場合に限り確立除外情報を作成してその探知覆域を形成するレーダに対して通知するようにし、このことによって、対応するレーダの追尾処理部14の追尾航跡の確立処理において、通知された確立除外情報と相関のとれる航跡に対しては確立させないようにしている。
(もっと読む)
航空管制用レーダシステム
【課題】離陸直後に出発機が急旋回する等の航路を取った場合にも機影を見失うことなく確認することができ、また滑走路周辺の離発着機情報を捉えることができる航空管制用レーダシステムを提供する。
【解決手段】航空管制用レーダシステムは、空港監視レーダ(ASR)と、二次監視レーダ(SSR)と、精測進入レーダ(PAR)と、所定の出発機についてSSRおよびASRによってそれぞれ得られる出発機情報とこの出発機についてPARによって得られる出発機情報とに基づいて出発機の追尾を行う。また、ASRで得ることができない滑走路周辺の離発着機情報をPARで補間し追尾を行う構成とすることができる。
(もっと読む)
精測進入レーダ装置
【課題】空中線の切替方式を簡略された系統にて実現可能な精測進入レーダ装置を提供する。
【解決手段】制御部16において、ビーム走査繰り返しごとに、方位空中線装置13の送信部131及び高低空中線装置14の送信部141それぞれの増幅動作を交互にオン/オフし、信号処理部15の信号処理器153に対しA/D変換器151,152それぞれの出力のうちいずれか1つを選択させるようにして、方位空中線装置13及び高低空中線装置14を交互に切り替えるようにしている。
(もっと読む)
測位システム、探知装置、測位装置、測位システムの測位方法、探知装置の探知方法、測位装置の測位方法、探知装置の探知プログラムおよび測位装置の測位プログラム
【課題】目標物を測位するために探知装置と測位装置との間で必要な通信帯域を少なくする。
【解決手段】基準信号送信装置120が目標10に向けて送信波30を発信し、各探知装置100は送信波30が目標10で反射した反射波32を受信する。各探知装置100は受信した反射波32に基づいて基準信号送信装置120が送信波30を送信してから探知装置100が反射波32を受信するまでの時間を算出し、算出した時間のみを特徴情報として測位装置140に送信する。測位装置140は各探知装置100から受信した各特徴情報に基づいて基準信号送信装置120から目標10を経由した各探知装置100までの距離を算出し、算出した距離と基準信号送信装置120の座標と各探知装置100の座標とに基づいて目標10の位置を測位する。
(もっと読む)
FM−CWレーダ装置及び移動物体の距離・速度検出方法
【課題】 FM-CWレーダの変調に三角波による場合のような対称性が求められない方式により、歩行者等の低速移動物体に適した距離・速度検出を可能にする。
【解決手段】 VCO12で鋸歯状に変化する制御信号によりFM変調したレーダ波をアンテナ19から送信する。ターゲットとなる移動物体からの反射波を受け、送信波とミキサ23で合波し、ミキサ出力からドプラー周波数を検出する。ターゲットとの距離がドプラー周波数の関数であるから、この関数関係に従い距離を求めることができる。また、所定時間を隔てた2時点で移動するターゲットを捕らえ、2点の距離から速度を求めることができる。
(もっと読む)
物標検出装置、物標検出方法、およびコンピュータが実行するためのプログラム
【課題】ピーク周波数成分が低周波領域に埋もれた状態から復帰してきた場合に、このピーク周波数成分が折り返しピーク周波数成分であるか否かを高精度に判定し、衝突寸前まで高精度な物標検出を行うことが可能な物標検出装置を提供することを目的とする。
【解決手段】本発明に係る物標検出装置は、FMCW方式を用いて検出した信号に周波数解析処理を施すことによって得られるピーク周波数成分のペアを用いて物標検出を行う第1の検出手段と、前記第1の検出手段と異なる方式で物標検出を行う第2の検出手段と、低周波数成分に埋もれていた前記ピーク周波数成分のペアの一方が復帰した場合、前記第2の検出手段の検出結果に基づいて、当該復帰したピーク周波数成分が折り返しピーク周波数成分であるか否かを判定する判定手段と、前記判定手段の判定結果に基づいて、前記第1の検出手段の物標検出方法を選択する選択手段と、を備えている。
(もっと読む)
目標位置確認システム及びレーダ信号処理装置
【課題】レーダ設置場所から見た移動目標の方位・距離のずれ調整作業を迅速かつ適切に行えるようにし、これにより作業の精度向上と作業時間短縮を図ることを可能とする目標位置確認システムを提供する。
【解決手段】滑走路RWY周辺に既知のGPS装置200を設置するだけでよく、またGPS装置200にPAR100への計測位置情報の送信機能を持たせることで、PAR100において自装置の経度緯度情報とGPS装置200の計測位置情報とを利用して、PAR100から見た航空機の方位・距離のずれを容易に調整できるようにしている。
(もっと読む)
車両の走行制御装置
【課題】車両の走行制御において、特に制動時により制動距離を短くし、かつそのときにスピンを防止するためには、車両運動を表す前後速度と左右速度,上下速度,ピッチ角,ロール角,横すべり角の6個の物理量を計測し、各車輪の制動力と各懸架のショックアブソーバの減衰係数を制御する必要がある。このとき、速度や角度を直接計測するセンサを装備する必要がある。
【解決手段】前後速度と左右速度を直接計測するために4つのレーダセンサを使用する。また、上下速度,ピッチ角,ロール角,横すべり角をレーダセンサの出力から間接的に計測。
【効果】3個または4個のレーダセンサを用いることにより、前後速度と左右速度,上下速度,ピッチ角,ロール角,横すべり角の6個の物理量を計測できる。また、2個のレーダセンサを用いることにより、前後速度と左右速度,横すべり角の3個の物理量を計測できる。
(もっと読む)
乗物または設備のための操舵および安全システム
乗物または設備のユーザが、乗物または設備の周囲状況および乗物または設備自体に関する高度でかつ最新の情報を取得することを可能にするための、乗物用システムが提供される。このシステムは、海洋船の上に位置してもよく、また、船上と船外の両方に位置する多数の異なる情報源からの情報を統合する。それらの情報は、船舶上の高度なレーダーおよびソナーサブシステムからの情報、従来の機器およびセンサからの情報、ならびに陸上のコントロールセンターからアクセスされる陸上および海上設備およびEO衛星からの情報を含む。このシステムは、利用可能である場合、通信衛星および/または無線インターネットによってコントロールセンターと通信してもよい。データを処理し、提示するためのデータ処理装置もまた提供される。データは、空間内において3次元で受信され、処理され、提示され、時間がデータに対して4つめの次元を提供するように、リアルタイムまたはほぼリアルタイムに更新される。データを提示するためのグラフィカルユーザインターフェースも提供される。このグラフィカルユーザインターフェースは、エンドユーザ自身の観測結果が提示されたデータに一致しない場合、システムにおいてエラーを報告するための機能を提供する。さらに、2つ以上の船舶を含むデータを収集するシステム、コントロールセンター、ならびに、船舶およびコントロールセンターが通信する手段が提供される。このシステムは、収集されたデータを記憶するカタログおよび記憶ネットワークを備える。すべてのデータは、データの関連する品質尺度と共に記憶される。  (もっと読む)
(もっと読む)
レーダ制御装置およびネットワークレーダ
【課題】 監視覆域がそれぞれ設定される複数のレーダから構成されるネットワークレーダにおいて、監視対象エリアを効率的に監視するネットワークレーダおよびこれに用いるレーダ制御装置を得る。
【解決手段】 レーダ制御装置は、目標物の想定航跡d3およびレーダ諸元d1に基づき監視覆域ごとで且つ想定航跡ごとに想定航跡上の目標物の探知性能d4を算出する探知性能算出部6、探知性能d4に基づきレーダ1それぞれが設定する監視覆域を計算する待ち受け組み合わせ計算部8、および待ち受け組み合わせ計算部8が計算した監視覆域の設定をレーダ1ごとに指示するレーダ統制部2を備えたことを特徴とする。なお、レーダ1は所定の監視覆域を設定でき、レーダ制御装置が決定した監視覆域を設定して監視するものであり、想定航跡とは目標物の軌道を予想したものである。
(もっと読む)
通信制御方法及びこれを用いたレーダシステム
【課題】 複数のセンサ装置から送信される大量の探知データを効率的に受信する。
【解決手段】 複数のセンサ装置から共通の情報処理装置に対して送信される目標物の探知データの通信量を制御する通信制御方法において、前記共通の情報処理装置は、複数のセンサ装置からそれぞれ送信された探知データを受信する工程と、それらの受信した探知データの通信量から前記複数のレーダ装置と情報処理装置との間の通信負荷を計算し、その通信負荷に応じた通信許可範囲を求める工程と、その求めた通信許可範囲を前記複数のレーダ装置に指示する工程とを備えた。
(もっと読む)
レーダ装置
【課題】物体までの距離や物体とレーダ装置との相対速度が変化する環境においても、波数推定を正確に行うレーダ装置を提供する。
【解決手段】電波を送信する送信部と、電波を受けた物体から反射される電波を受信する複数のアンテナと、複数のアンテナから供給される受信信号に応じて、物体に反射される電波の反射波強度の角度スペクトラムを算出し、角度スペクトラムにおいて設定される閾値を越える部分をカウントすることにより到来する電波の波数を推定し、推定された波数と複数のアンテナから供給される受信信号とに応じて、測角方法を用いて物体の存在する方向を判定する信号処理部とを有するレーダ装置であって、信号処理部は、複数のアンテナから供給される受信信号に応じて、電波を反射する物体までの距離を算出し、算出された距離に応じて閾値を設定する。
(もっと読む)
レーダ装置
【課題】2つの検知領域の重複した領域において、一方のセンサの受信信号解析を停止することにより、処理の効率化が可能なレーダ装置を提供する。
【解決手段】第一の検知範囲に電波を送信するための第一の送信部と、第一の検知範囲から電波の反射波を受信するための第一の受信部と、第一の検知範囲に存在する物体を検出するための第一の信号処理部23とを有する遠距離用レーダセンサ21と、第一の検知範囲よりも幅が広く距離が短い第二の検知範囲に電波を送信するための第二の送信部と、第二の検知範囲から電波の反射波を受信するための第二の受信部と、第二の検知範囲に存在する物体を検出するための第二の信号処理部24とを有する近距離用レーダセンサ22と、第一及び第二の信号処理部から供給される情報を統合する処理部25とを備えるレーダ装置であって、第二の送信部は、双方の検知範囲の重複範囲に対し、電波の送信を停止することを特徴とする。
(もっと読む)
超広帯域レーダセンサおよびネットワーク
超広帯域レーダ動きセンサが関心領域に戦略的に配置され、無線アドホックネットワークと通信して、遠隔領域の監視を提供する。動きセンサにインパルスレーダ、心拍及び呼吸監視を組み合わせることでさらに識別を向上させる。  (もっと読む)
(もっと読む)
121 - 140 / 207
[ Back to top ]