
Fターム[5J070BD01]の内容
レーダ方式及びその細部 (42,132) | 組合せ (788) | 一次レーダと一次レーダ (279)
Fターム[5J070BD01]の下位に属するFターム
バイ又はマルチスタチックレーダ (72)
Fターム[5J070BD01]に分類される特許
161 - 180 / 207
対象物を特定するための装置、殊に位置決定装置または材料識別装置
本発明は、誘導センサ(8)と、該誘導センサ(8)の位相情報を評価するための制御ユニット(10)と、指示手段(4,4a〜4d)とを備えている、対象物(14,16)を特定するための装置から出発している。指示手段(4,4a〜4d)は対象物(14,16)の特性を示すように構成されておりかつ制御ユニット(10)は位相情報に依存して指示手段(4,4a〜4d)をドライブ制御するように設定されていることが提案される。 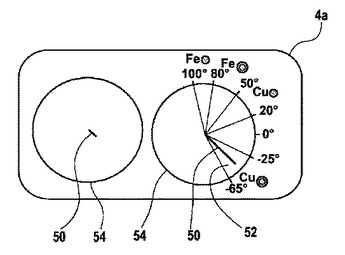 (もっと読む)
(もっと読む)
誘導弾発射システムとその信号処理方法

【課題】目標への距離計測にかかる時間を短縮でき、目標位置を正確に計測できるようにした誘導弾発射システムを提供すること。
【解決手段】1つの誘導弾においてパルス繰り返し周期と目標検出ゲートの位置とを切り替えるのではなく、パルス繰り返し周期と目標検出ゲートの位置とを互いに異ならせた複数の誘導弾を用い、各誘導弾により得られた目標情報を用いて目標までの距離を測るようにする。これにより、HPRF方式を用いる場合においてパルス繰り返し周期と目標検出ゲートの位置とを切り替える回数を減らすことができ、最短で1回で目標位置を求めることができる。このことから誘導弾と目標との距離を速く、正確に計測することができるようになり、目標への距離計測にかかる時間を短縮して目標位置を正確に計測できるようになる。従って射撃統制装置が機能しない場合においても、自律的な迎撃処理を迅速かつ確実に実行することが可能になる。
(もっと読む)
追尾処理システム

【課題】 広域を観測するセンサで得た複数の目標観測情報を統合して精度を上げた目標追尾装置を得る。
【解決手段】 航空機外と通信して、広域センサの観測情報を入手する広域情報入力手段14と、広域情報入力手段14から転送された広域センサからの観測情報に最も近いクラスタ(目標予測存在範囲の集合体)を、クラスタに含まれる航跡の情報を参照して、対象クラスタとして選択する広域情報相関手段10と、広域情報相関手段10で指定した対象クラスタに含まれる仮説のうち、航跡数が広域情報の観測値と一致するもの及びそれ以上観測している仮説の信頼度を向上させる信頼度補正手段11と、信頼度補正手段11の信頼度の補正結果を元に、仮説生成・準最適化のフェーズで、仮設の信頼度を決定する相関・統合手段5とを備えた。
(もっと読む)
入港船舶の許可不許可判別システム
【課題】水上において所定領域内への船舶の入港を管理することができる。
【解決手段】入港船舶の許可不許可判別システムは、船舶1に取り付けられ該船舶1の許可情報を送信するIDタグ2と、船舶1が入港するときに通過する所定の検知領域G内で船舶1を検知するための船舶検知手段11と、IDタグ2からの許可情報を受信する許可情報受信手段12と、受信した許可情報に基づき船舶1の入港を許可するか許可しないかの判別を行なう許可不許可判別手段53とを有する。また、船舶検知手段11の出力により船舶1が入港を検知し、入港許可船舶ではないと判断された時に船舶1に対して警告を行う警告手段13を備える。
(もっと読む)
ミリ波を用いた位置検出装置
【課題】水蒸気及び/又は粉塵を含む雰囲気下においても例えばスラブ等の被検出物を高精度に検出すること。
【解決手段】例えば製鉄所の圧延工程において、水蒸気及び/又は粉塵を豊富に含む雰囲気中を搬送手段例えばローラコンベア22により搬送される被検出物であるスラブ2の搬送経路を横切るように、所定の周波数例えば60GHzのミリ波を送信する発信部3と、この発信部3からのミリ波を受信する受信部4とを対向配置して構成される位置検知器を搬送方向に沿って複数組配置し、当該受信部4が受信した検出信号に基づいてスラブ2が通過したか否かを判別する。この場合、直進性の高いミリ波は水蒸気や粉塵などの浮遊微粒子に遮られることが少ないので、高精度にスラブ2を検出することができる。
(もっと読む)
測定装置、および媒体に封鎖された対象物を電磁的HF信号によって位置特定するための方法
本発明は、媒体に封鎖された対象物を電磁HF信号により位置特定するための測定装置、とりわけ携帯型測定装置であって、ケーシング(82)と、該ケーシング(82)に配置された少なくとも1つの高周波センサとを有し、該高周波センサは、少なくとも1つの第1のアンテナ素子(12)を備える第1のアンテナ配置構成体(10)を有し、前記アンテナ素子は有利には第1の偏波面で放射および/または受信する形式の測定装置に関する。本発明によれば、前記アンテナ配置構成体(10)は、少なくとも1つの別のアンテナ素子(14)を有し、該別のアンテナ素子の偏波面は、前記第1のアンテナ素子(12)の偏波面に対して回転されている、ことが提案される。さらに本発明は、媒体に封鎖された対象物を電磁HF信号を用いて、複数のアンテナ素子(12,14;11,12)を備える測定装置により位置特定するための方法に関し、ここでは測定信号の送信および/または受信が種々異なる偏波面で実行される。 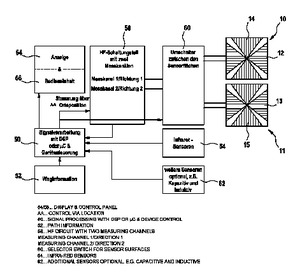 (もっと読む)
(もっと読む)
ボール計測装置
【課題】天候や明るさの影響を受けにくく且つ精度よく弾道計測が可能なボール計測装置の提供。
【解決手段】打撃位置から着地位置までのボールの弾道、着地位置及び停止位置を計測可能なボール計測装置100である。このボール計測装置100は、上記打撃位置から上記弾道の所定位置までの計測が可能で且つ少なくとも一つの送信アンテナ及び複数の受信アンテナを備えた第一のミリ波レーダ装置1と、上記停止位置の計測が可能で且つ少なくとも一つの送信アンテナ及び複数の受信アンテナを備えた第二のミリ波レーダ装置2と、上記複数の受信アンテナにより受信された信号に基づいてボールの三次元座標を算出する演算部とを有している。第一のミリ波レーダ装置1と第二のミリ波レーダ装置2とは互いに異なる位置に設置されている。
(もっと読む)
ボール計測装置
【課題】天候や明るさの影響を受けにくく且つ精度よく弾道計測が可能なボール計測装置の提供。
【解決手段】打撃位置から着地位置までのボールの弾道、着地位置及び停止位置を計測可能なボール計測装置100である。このボール計測装置100は、上記弾道の計測が可能で且つ少なくとも一つの送信アンテナと複数の受信アンテナとを備えたミリ波レーダ装置1と、上記停止位置の計測が可能なCCDカメラ2と、上記複数の受信アンテナにより受信された信号に基づいてボールの三次元座標を算出するレーダ用演算部と、上記CCDカメラの画像データに基づいて上記停止位置の座標を算出するカメラ用演算部とを有している。ミリ波レーダ装置1とCCDカメラ2とは互いに異なる位置に設置されている。
(もっと読む)
位置測定方法及び位置測定装置
【目的】 複数の広角レーダ装置を用いて目標物の位置測定する場合において位置測定精度を向上する「位置測定方法及び位置測定装置」を提供することである。
【構成】 複数の広角レーダ装置を用いて目標物の位置を測定する場合、各広角レーダ装置は、目標物を含む複数の物体を分離することが不可能になったとき該広角レーダ装置から出力する位置データにフラグを付加し、位置決定部は、各広角レーダ装置から出力されるいずれの位置データにもフラグが付加されていなければ、各広角レーダ装置から出力される位置データを用いて加重平均により目標物の位置を決定し、いずれかの位置データにフラグが付加されていれば、該位置データを除外して目標物の位置を決定する。
(もっと読む)
飛翔体誘導システム
【課題】 飛翔体誘導システムが、飛来する敵機をキャッチしてこれを迎撃すべくミサイル等の飛翔体を発射させるとき、飛翔体が種別の異なる敵機に対しても容易かつ適切に対応できるようにする。
【解決手段】 捜索レーダ1が空間を捜索して目標Aを検出し、判定器2がその検出した目標Aの種別を判定する。
捜索レーダ1がキャッチした目標Aに向けて飛翔体6が発射され、飛翔体6が目標Aを検知して追尾するとき、予め判定器2によって判定された目標Aの種別に対応した目標検出プログラム(A1,A2,・・・An)が選択されて飛翔体6に送信供給される。
従って、飛翔体6は、異なる種別の目標Aに対応した操舵翼66a,66bに対する目標位置情報を、その送信供給された目標検出プログラムに基づき生成できるので、格別複雑な構成を採用することなく、異なる複数種別の目標Aに対応することができる。
(もっと読む)
分散ネットワーク・レーダ装置
【課題】 複数のレーダを使用して探知能力の拡大を図るレーダ装置において、車載移動型捜索レーダのように、設置場所が探索の都度に移動するために各レーダの周囲の地形環境が変化する場合であっても、電波干渉の影響を受けることなく、探知能力の拡大を図ることができる分散ネットワーク・レーダ装置を提供する。
【解決手段】 レーダ1とレーダ2を相互にネットワーク連接し、前記各レーダ間の送受信同期のために送受信同期部7−1で制御し、前記各レーダ毎に設置された送信部1−1及び2−1から互い相異なる周波数チャンネルの電波を目標3に向かってアンテナ1−3及び2−3を介して放射し、前記目標3で反射された全ての周波数チャンネルの電波を前記各アンテナ1−3及び2−3を介してそれぞれで受信し、各受信信号の電力振幅検出、ビデオ積分、測角演算、平均演算を行うようにした。
(もっと読む)
飛行場用気象レーダ装置とその風観測運用方法と風観測システム
【課題】飛行場用として、降雨・非降雨にかかわらず、風観測を可能にする。
【解決手段】空中線装置15によりレーダパルスを放射して降雨エコーを受信し、信号処理装置11にてその信号強度から降雨状況を観測して、降雨状況に応じて降雨時観測モードと非降雨時観測モードを選択的に切り替える。ここで、降雨時観測モードでは、エコー成分を観測し、この観測結果から風向・風速を算出するものとし、非降雨時観測モードでは、受信信号を積算してSNを向上させ、ブラック散乱によるエコー成分を観測し、この観測結果から風向・風速を算出する。
(もっと読む)
レーダシステム
【課題】 クロスレンジ分解能を向上し、マルチパス環境下においても測角精度を確保することができ、妨害環境下においても探知/追尾性能を確保することができるレーダシステムを提供する。
【解決手段】 目標4の捜索範囲又は追尾範囲、所望のクロスレンジ分解能、レーダ装置1,2の距離分解能に応じて決定された離隔距離Lだけ互いに離隔してレーダ装置1,2を配置し、レーダ装置1から目標4までの距離Rt1が基準距離を超える場合には、レーダ装置1で測角して生成された方位情報に基づいて目標4の位置を特定し、基準距離以下の場合には、レーダ装置1,2で測定して生成された距離情報に基づいて目標4の位置を特定する。
(もっと読む)
少なくとも一つの複数周波数センサを用いた連続媒体および/または局在ターゲットの特性を測定するシステムおよび方法
空間の所定の体積中の連続媒体または少なくともひとつの局在ターゲットの少なくとも一つの特性を示すデータを得るための方法およびシステムを提供する。このシステムは連続媒体またはターゲットからの複数の信号を捕らえる少なくとも一つのセンサを有するセンサ構成を含む。複数の信号それぞれは、異なる周波数にそれぞれ中心がある。このシステムはまた、センサ構成により捕捉された複数の信号を用いてべき乗重み付き増分を計算すること、および複数のモデルを用いて複数のべき乗重み付き増分を連続媒体またはターゲットの特性に関連付けることによって、連続媒体またはターゲットの特性を示すデータを得るための処理回路を含む。連続媒体またはターゲットの選択された特性は、従来の相関関数、スペクトルおよび構造関数を基にした方法およびシステムで可能であったよりも、より優れた正確さおよび時間的および/または空間的分解能をもって推定することができる。従来の方法およびシステムに比べて、この発明は、たとえばグランドおよびシークラッタなどの大きい時間的スケールにおける信号の汚染に対して敏感ではなく、低周波数の外乱に対して敏感ではない。この発明は、たとえば、サイズ、形状、視認性、速度、動きの方向、および前述の特性の変化率の割合などの、媒体やターゲットの様々な特性を推定することが可能である。 (もっと読む)
空港面監視システムおよびこれに用いる航跡統合装置
【課題】 複数の目標検出装置を併用して空港面を監視する場合において、各目標検出装置の位置検出精度に応じた正確な統合航跡の座標位置を決定する。
【解決手段】 複数の目標検出装置を併用して空港面を監視し、前記複数の目標検出装置により検出された同一目標物についての航跡情報から統合航跡を生成して表示部に表示する空港面監視システムにおいて、空港面のセンターライン情報を蓄積したセンターラインデータベースからセンターライン情報を読み出し、そのセンターライン情報を用いて複数の目標検出装置により検出された各航跡情報の座標位置から基準センターラインまでの垂直距離をそれぞれ算出し、それら垂直距離に基づく重み付け割合により前記同一目標物について統合航跡の座標位置を決定する。
(もっと読む)
イベント捕捉およびフィルタリングシステム
【課題】 関心イベントを決定するために検出されたイベントをフィルタリングするシステムおよび方法を提供する。
【解決手段】 検出されたイベントを識別し、センサデータを評価して各イベントに関連する少なくとも1つの特性を決定し、複数の検出されたイベントとそれらの関連する特性とを報告する。少なくとも1つの関連イベント発生部が、少なくとも1つの関連イベントを生成し少なくとも1つのイベント報告を生成するように動作可能である。所与のイベント報告は、関連イベントに関連する少なくとも1つの特性を提供する。イベントフィルタリングシステムが、少なくとも1つのイベント報告を検出されたイベントと比較することにより、複数の検出されたイベントの中の少なくとも1つの関連イベントを識別する。
(もっと読む)
レーダ装置および類似装置
【課題】
複数のレーダアンテナから得られる探知データを正確に合成して表示するレーダ装置を提供する。
【解決手段】
レーダアンテナ11から得られた探知データは相関処理部91Aで相関処理される。レーダアンテナ21から得られた探知データは相関処理部91Bで相関処理される。レーダアンテナ21からの相関処理データと同じアドレスを指定するマスク画像は、マスク領域発生部32により設定されてマスク用画像メモリ62に書き込まれる。これら相関処理部91A,91Bの各相関処理データはレーダアンテナ11,21の設置位置に応じたアドレス設定がされており、相関処理部91Bの処理用画像メモリ902B、マスク用画像メモリ62は共通のアドレスが設定されている。表示用画像メモリ61は、マスクデータに従って入力された相関処理データを表示画面に設定されたアドレスに従って記憶するとともに表示器10に出力する。
(もっと読む)
ネットワークレーダ装置
【課題】 目標検出性能を向上するネットワークレーダ装置を得る。
【解決手段】 レーダアンテナ1a,2aの各々の位置を検出する位置検出部1b,2bと、レーダアンテナ1a,2aの各々のビーム指向方向を制御するビーム制御部1c,2cと、レーダアンテナ1a,2aの各々の位置とビーム指向方向とに基づいてレーダアンテナ1a,2aからの受信信号の到来時刻差を求め、レーダアンテナ1a,2aからの受信信号の到来時刻をその到来時刻差に応じて補正する目標距離補正部11,12と、補正されたレーダアンテナ1a,2aからの受信信号の相関処理を行い、それら受信信号の振幅値に応じて目標の有無を検出するバイナリ積分型目標検出部21とを備えた。バイナリ積分型目標検出部21において、レーダアンテナ1a,2aからの受信信号の相関処理での相関ゲートサイズを小さくすることができ、目標検出性能を向上することができる。
(もっと読む)
車両用物体検出装置
【課題】 アレーアンテナを用いて高精度に物体を検出できる領域が拡張された車両用物体検出装置を提供すること。
【解決手段】 車両に搭載され、自車両周辺の物体(移動体又は停止物)を検出する車両用物体検出装置に、第一の領域においては第一の精度で物体を検出し、第一の領域とは異なる第二の領域においては第一の精度よりも低い第二の精度で物体を検出する1以上の検出器から成る物体検出手段と、物体検出手段により第一の領域内の複数の場所でそれぞれ検出された複数の物体相対位置に基づいて物体のその後の相対移動軌跡を推定する軌跡推定手段と、物体検出手段により第二の領域内で検出された物体相対位置と軌跡推定手段により推定された物体の推定相対移動軌跡とが重なったとき、第二の領域内で検出された物体相対位置を第二の精度より高い第三の精度で検出されたものとみなす精度補正手段とを備える。第三の精度は、例えば、第一の精度と等しい。
(もっと読む)
追尾装置及び目標へのセンサ割り当て方法
【課題】 弾道軌道目標に対する追尾性能を向上させる。
【解決手段】 目標類別・センサ制御処理部80は、RCS算出処理部60からのRCSがついた航跡諸元と統合航跡諸元の中から、RCSのしきい値よりも大きいRCSを持つ航跡諸元と統合航跡諸元を抽出し、抽出したRCSの大きい航跡諸元と統合航跡諸元に関連するレンジ方向及びクロスレンジ方向のセンサ配置情報を用いて、目標の進行方向がレンジ方向のセンサの観測ビームを集中的に割り当てるセンサ制御信号をセンサ群20に出力し、目標の速度ベクトルにより弾頭とブースターを類別し、弾頭に観測ビームを集中的に割り当てるセンサ制御信号をセンサ群20に出力する。
(もっと読む)
161 - 180 / 207
[ Back to top ]