
Fターム[5J070BD04]の内容
レーダ方式及びその細部 (42,132) | 組合せ (788) | レーダとソーナ (19)
Fターム[5J070BD04]に分類される特許
1 - 19 / 19
レーダ基準方位補正装置、レーダ装置、レーダ基準方位補正プログラム、及びレーダ基準方位補正方法
【課題】レーダ装置の探知方向の基準である基準方位を高精度に補正するレーダ基準方位補正装置を提供する。
【解決手段】レーダ基準方位補正装置は、相対位置取得部と、絶対位置取得部と、演算部と、補正部と、を備える。相対位置取得部は、レーダ装置(レーダアンテナ)に対する物標の相対位置を取得する。絶対位置取得部は、レーダ装置の絶対位置及び物標の絶対位置を取得する。演算部は、相対位置に基づく、レーダ装置に対する物標の方向と、絶対位置に基づく、レーダ装置に対する物標の方向と、の差である誤差角を求める。補正部は、演算部が求めた誤差角に基づいて、基準方位を補正する。
(もっと読む)
移動目標対応型スキャン相関方法

【目的】本発明は、レーダ、超音波、光学カメラ装置に関し、従来のスキャン相関処理の欠点である移動ターゲット信号をクラッタ同様に抑圧してしまう問題を解決するとともに、クラッタのみをより積極的に抑圧し、ターゲットの識別能力を向上させることを目的とする。
【構成】信号受信部より逐次出力されるビデオ信号をスキャン毎記憶する受信映像メモリと、前記受信映像メモリに記憶された複数のスキャン画像を小区画領域に分割し、その領域内に存在するターゲットの移動ベクトルを算出する移動ベクトル算出部と、前記小区画領域内にターゲットが存在する可能性を示す指標を算出するターゲット指標算出部と、前記小領域領域内のクラッタレベルを算出するクラッタレベル算出部と、前記、ターゲット指標、移動ベクトル、クラッタレベル情報を入力とするスキャン相関処理部と、前記スキャン相関処理結果を表示する表示部とを有する。
(もっと読む)
センサを用いた追突事故防止装置
【課題】速度のみが検出可能な非接触式のミリ波センサの出力情報のみで、追突事故を防止するために運転手に警報を与えるシステムを比較的安価に提供する。
【解決手段】複数のミリ波センサにより、同一方向の目標物との相対速度が測定可能な構成となっていて、かつ各々のミリ波センサの検出範囲を異なるものとし、最も遠くから検出できるミリ波センサから順に判定用の速度閾値を小さくなるようにあらかじめ設定し、各々のミリ波センサで計測した速度がそれぞれ設定された閾値以上であるか判定し、閾値以上であった場合には追突する可能性があると判定するように構成した。
(もっと読む)
対象物を位置特定するための方法およびシステム
本文書は対象物の位置特定のための方法およびシステムを説明する。対象物(1)は少なくとも一つの第1のタイプの信号を照射され、前記信号の反応を探知する方法を踏まえ。本発明によれば、前記対象物(1)は前記第1のタイプの信号を後方散乱するトランスポンダ(2,3)を取り付けられ、前記トランスポンダ(2,3)は、前記トランスポンダ(2,3)の後方散乱周波数に影響を与える第2のタイプの信号でも照射され、前記トランスポンダ(2,3)からの後方散乱信号は対象物を位置特定するために探知される (もっと読む)
目標追跡装置
【課題】追跡精度を向上させることができる目標追跡装置を提供する。
【解決手段】目標を追跡するアクティブセンサ3からの観測値に基づく目標航跡と、目標の角度を測定するパッシブセンサ1からの観測値に基づく目標航跡とが同一目標を示していると判定した場合にこれら2つの目標航跡のデータ融合を行ってデータ融合航跡として出力するデータ融合部5と、データ融合部からのデータ融合航跡に基づいて、パッシブセンサからの観測値を入力して目標の航跡を算出するための補正情報を算出する補正情報算出部6aと、パッシブセンサからの観測値と補正情報算出部からの補正情報に基づいて、目標の航跡を算出して目標航跡として出力するパッシブセンサ処理部2aを備える。
(もっと読む)
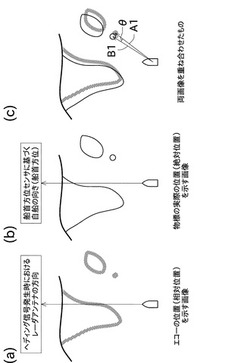
溶鉱炉のための測定装置と測定方法、このような種類の装置を有する溶鉱炉、および少なくとも1つの測定プローブのための傾斜装置
【課題】本発明は、電磁波を送信および受信するための少なくとも1つの第1の測定プローブ(10)を有する、溶鉱炉のための表面測定のための測定装置に関する。
【解決手段】本発明は、音波を送信および受信するための少なくとも1つの第2の測定プローブ(11)によって区別され、上記第1および第2の測定プローブ(10、11)は上記第1および第2の測定プローブ(10、11)の測定データにおける温度関連の差が上記溶鉱炉内の装入物の表面におけるガス温度分布を解明するために決定されるように整えられるような仕方で前記測定データの評価のためのプロセッサ(12)に接続される。
(もっと読む)
レーダ装置
【課題】 先行車両のような障害物の向こう側に存在する先先行車のような物体についてもその位置等を正確に検出することを可能としたレーダ装置を提供する。
【解決手段】 物体に電磁波を照射し、その反射に基づいてその物体の位置を検出するレーダ(例えば、レーザレーダ1)の出力から距離・方位検出手段21により物体までの距離・方位を検出し、路面位置判定手段22で判定した路面位置に基づき、虚像物標判定・変換手段23は、判定した位置が路面より下に位置すると判定した場合には、路面に対して面対称な位置に変換した位置を物体の本来の位置とし、出力手段24により出力する。
(もっと読む)
レーダ判定装置、レーダ保全装置
【課題】レーダに付着した汚れの有無の誤判定を低減する、レーダ判定装置等を提供する。
【解決手段】車両1は、レーダ101、ACC(車間距離制御)制御ECU2を備える。ACC制御ECU2内に、その内部のマイクロコンピュータの機能部として構成する判定部20を備える。判定部20は、レーダ検知処理21、条件判定処理22、レーダ汚れ判定処理23を実行する。レーダ検知処理21では、レーダ101が所定時間、障害物を検知できないことを判定基準としてその汚れの存在を推定する。条件判定処理22では、ACC制御ECU2に接続された各種センサ類/各種ECU等3の情報を入力して、水分条件、地域条件を判定する。レーダ汚れ判定処理23では、レーダ検知処理21で汚れの存在を推定した場合でも、水分条件、地域条件が成立しない場合には、異常と判定せず、レーダ検知処理21の時間のカウントをリセットする。
(もっと読む)
物体検出装置
【課題】 音波を利用して物体のより精度の高い位置に関する情報を検出することが可能な物体検出装置を提供する。
【解決手段】 フュージョン処理演算部44が、ミリ波レーダ21が検出した物体であるミリ波単独物標と、超音波センサ22が検出した物体である超音波単独物標とが同一物体であるか否かを照合し、ミリ波単独物標と超音波単独物標とが同一物体であると照合したときに、ミリ波単独物標から予測したミリ波予測位置と超音波単独物標とに基づいて、超音波センサ22の検出領域における物体の情報を検出する。これにより、電磁波による検出結果も利用して、超音波によって検出した物体の情報を算出することで、電磁波だけでは検出の困難な至近距離の物体についてもより詳細な情報を検出することが可能となる。
(もっと読む)
車載用レーダ装置、及び車載用レーダ制御方法
【課題】人体に電磁波を照射する可能性が高い場所を車両が走行している場合に、人体への電磁波照射を低減すると共に、車両が当該車両周辺の物体と衝突することを回避することができる車載用レーダ装置を提供する。
【解決手段】車載用レーダ装置であって、自車周辺に電磁波を照射する電磁波照射部と、電磁波を照射することによって自車周辺の物体から反射される反射波を受信する反射波受信部と、反射波に基づいて、自車周辺の物体を検知する電磁波物体検知部と、自車周辺の物体を補助的に検知する物体補助検知部と、所定の場所を自車が走行している状態か否かを判定する走行状態判定部と、所定の場所を自車が走行している状態であると判定したときに、電磁波物体検知部の検知方向と同じ方向の物体補助検知部の検知状態に応じて、電磁波照射部による電磁波の照射を停止、又は照射強度を弱める電磁波照射制御部とを備える。
(もっと読む)
情報表示装置
【課題】1つの表示画面上に各種情報処理端末から得られた動的な情報をリアルタイムに表示しつつ、ユーザが簡単な操作によって所望の機能選択を実行できる情報表示装置を提供することを目的とする。
【解決手段】表示画面上に表示中のメニュー項目の階層を容易に把握できるようにメニュー項目の内容とともに階層に関する情報100、101を表示し、表示したメニュー項目の選択をロータリーエンコーダなどの回転操作部52を用いて操作するようにした。
(もっと読む)
周辺監視装置
【課題】構成及び制御の複雑化を招くことなく、レーダの軸ずれによる検出誤差を防止する又は検出誤差による制御誤差を防止することができる周辺監視装置を提供すること。
【解決手段】本発明による周辺監視装置1は、車両の周辺の障害物を検出する第一の検出手段5a、5bと、第一の検出手段5a、5bの近傍に位置して、車両の周辺の障害物を検出する第二の検出手段2a〜2fと、第一の検出手段5a、5bの検出結果に基づいて車載機器を制御する制御手段6とを備える周辺監視装置であって、
制御手段6が、第二の検出手段2a〜2fの異常を検出した場合に、第一の検出手段5a、5bの検出結果の検出態様及び/又は前記制御の内容を変更することを特徴とする。
(もっと読む)
乗物または設備のための操舵および安全システム
乗物または設備のユーザが、乗物または設備の周囲状況および乗物または設備自体に関する高度でかつ最新の情報を取得することを可能にするための、乗物用システムが提供される。このシステムは、海洋船の上に位置してもよく、また、船上と船外の両方に位置する多数の異なる情報源からの情報を統合する。それらの情報は、船舶上の高度なレーダーおよびソナーサブシステムからの情報、従来の機器およびセンサからの情報、ならびに陸上のコントロールセンターからアクセスされる陸上および海上設備およびEO衛星からの情報を含む。このシステムは、利用可能である場合、通信衛星および/または無線インターネットによってコントロールセンターと通信してもよい。データを処理し、提示するためのデータ処理装置もまた提供される。データは、空間内において3次元で受信され、処理され、提示され、時間がデータに対して4つめの次元を提供するように、リアルタイムまたはほぼリアルタイムに更新される。データを提示するためのグラフィカルユーザインターフェースも提供される。このグラフィカルユーザインターフェースは、エンドユーザ自身の観測結果が提示されたデータに一致しない場合、システムにおいてエラーを報告するための機能を提供する。さらに、2つ以上の船舶を含むデータを収集するシステム、コントロールセンター、ならびに、船舶およびコントロールセンターが通信する手段が提供される。このシステムは、収集されたデータを記憶するカタログおよび記憶ネットワークを備える。すべてのデータは、データの関連する品質尺度と共に記憶される。  (もっと読む)
(もっと読む)
リソース管理装置及びそのためのプログラム
【課題】入札処理が時間制約の範囲内で完了するようにリソースの割り当て行なうリソース管理装置を提供する。
【解決手段】リソース管理装置101は、複数のアプリケーションプログラムのそれぞれに対応して設けられ、複数のアプリケーションプログラムのそれぞれが所定の単位時間内に消費または供給するリソースについて、入札値を計算して入札値の情報を生成する複数のリソース応札部102と、複数のリソース応札部102からの入札値の情報に基づいて、所定の単位時間における、複数のアプリケーションプログラムのそれぞれに割り当てるリソースを決定するリソース割り当て処理を行なう入札管理部103と、所定の単位時間において、入札打ち切り条件が満たされるまでリソース割り当て処理が繰り返されるように入札管理部103を管理する繰り返し管理部107とを有する。
(もっと読む)
電波探知装置および方法
【課題】前方の探知対象物の誤探知を低減できるようにする。
【解決手段】例えば、モノパルス式レーダは、最初に、広角送信アンテナからの送信信号に対する受信信号が受信された場合(S1乃至S3YES)、その受信信号から角度を演算し、その角度に基づいて前方ターゲットの存在可能性があるか否かを判定する(S4,S5)。存在可能性があると判定した場合、モノパルス式レーダは、広角送信アンテナよりも指向性の半値角が狭角の狭角送信アンテナに切り替え(S6)、狭角送信アンテナからの送信信号に対する受信信号から角度を演算し、その角度に基づいて前方ターゲットを探知したか否かを判定する(S7乃至S10)。そして、前方ターゲットを探知したと判定した場合、モノパルス式レーダは、ターゲット探知信号を出力する(S11)。本発明は、モノパルス式レーダに適用可能である。
(もっと読む)
ICタグ及びICタグを用いた位置検出システム
【課題】 所定の空間において時間の経過と共に位置が変化する対象物を特定するための情報を非接触方式で発信することができる低コスト且つ小型化されたICタグを提供する。
【解決手段】 少なくとも、所定の情報が格納されているICチップ31と該ICチップ31に電気的に接続される非接触通信用アンテナコイル32とを有し、外部アンテナから発信される電波を介して非接触通信用アンテナコイル32で起電をトリガとして起電した際に、非接触方式で情報を該外部アンテナへ送信するICタグ30において、ICチップ31に電気的に接続されると共に、超音波を発信する超音波圧電素子33を具備し、非接触通信用アンテナコイル32が外部アンテナからの電波を受信して起電した際に、ICチップ31に予め格納された自身を識別するための識別番号を送信すると共に、超音波を発信する。
(もっと読む)
イベント捕捉およびフィルタリングシステム
【課題】 関心イベントを決定するために検出されたイベントをフィルタリングするシステムおよび方法を提供する。
【解決手段】 検出されたイベントを識別し、センサデータを評価して各イベントに関連する少なくとも1つの特性を決定し、複数の検出されたイベントとそれらの関連する特性とを報告する。少なくとも1つの関連イベント発生部が、少なくとも1つの関連イベントを生成し少なくとも1つのイベント報告を生成するように動作可能である。所与のイベント報告は、関連イベントに関連する少なくとも1つの特性を提供する。イベントフィルタリングシステムが、少なくとも1つのイベント報告を検出されたイベントと比較することにより、複数の検出されたイベントの中の少なくとも1つの関連イベントを識別する。
(もっと読む)
距離検知装置
【課題】距離を検知する際の誤差を抑えて、かつ、安価な距離検知装置を提供することを目的とする。
【解決手段】電波を送信する第1通信手段11と、音波を受信して電気信号に変換するセンサ14と、センサ14で変換された信号から特定の信号を検出する検出手段15と、を有する第1装置Aと、第1通信手段11からの電波を受信する第2通信手段21と、第2通信手段21が電波を受信したときに音波を発振する音波発振手段23と、を有する第2装置Bと、を備え、第1装置Aは、第1通信手段11が第2通信手段21に電波を送信してから、センサ14が音波発振手段23からの音波を受信し、検出手段15によって特定の信号が検出されるまでの時間を計測する時計13をさらに備え、時計13が計測した時間と、音波の速さとから第1装置Aと第2装置Bとの間の距離を検知する距離検知装置。
(もっと読む)
車両用始動支援システム
前方を走行する車両(36)を位置測定するための長距離位置測定システム(10)と、始動プロセスを起動および制御するための始動制御器(24、26)と、を備える車両用始動支援システムにおいて、長距離位置測定システムが自己の車両(34)のすぐ前方の対象(46)を位置測定するための短距離位置測定システム(12)と組合されており、近距離位置測定システム(12)の信号に応じて始動プロセスを阻止するように決定装置(22)が形成されている。 (もっと読む)
1 - 19 / 19
[ Back to top ]