
Fターム[5J070BD06]の内容
レーダ方式及びその細部 (42,132) | 組合せ (788) | レーダと光レーダ (26)
Fターム[5J070BD06]に分類される特許
1 - 20 / 26
無線機の方位検出装置
【課題】無線機の方位を電波の到来方向により検出する方位検出装置において、その近傍に反射物体が存在すると、反射波の影響により方位の検出精度が低下する。
【解決手段】記憶部28は電波の反射物体が存在する方位を示す反射角度範囲を記憶する。タグ解析手段42は電波の受信強度のピークに基づいて当該電波の到来方向を判定し無線タグ6の方位を検出する。タグ解析手段42は、受信強度の第1ピークに基づく到来方向が反射角度範囲内である場合には、受信強度の第2ピークに基づく到来方向の検出を試行し、その試行結果に応じて無線タグ6の方位を決定する。
(もっと読む)
目標検出装置

【課題】近接信管を搭載する飛しょう体において、地上の目標との相対距離差を利用して目標検出を行う場合、目標付近に樹木等の目標以外の物体があると、樹木等を目標と誤検出するという課題がある。
【解決手段】 目標に向けレーザ光を送信する送信部と、レーザ光が前記目標で反射された反射波を受信する受信部と、前記反射波に基づき目標を抽出する信号処理部とを備え、信号処理部は、同じ飛しょう体が搭載するシーカが取得した前記目標に係る目標情報(主に測角情報)に基づき目標方向を限定していくことで目標以外の物体への誤検出を防止する。
(もっと読む)
センサ統合システム及びセンサ統合方法
【課題】複数種類のセンサによる観測データを組み合わせて、目標物の高精度な移動軌跡を抽出する。
【解決手段】プロセッサと、前記プロセッサに接続される記憶装置と、前記プロセッサに接続される出力装置と、を備えるセンサ統合システムであって、前記記憶装置は、複数のセンサによって観測された観測データを保持し、前記観測データはあらかじめ規定された項目のうち選択的に記述された項目を含み、前記プロセッサは複数の前記観測データの選択記述された前記項目を組み合わせ、一つ以上の目標物の移動軌跡を推定し、前記出力装置は、前記移動軌跡を示す情報を出力する。
(もっと読む)
目標検出装置およびシステム
【課題】屋外等の暴露環境に適した安価な目標検出装置または目標検出システムを提供し、監視領域内に侵入した複数の目標を高精度かつ高速に検出する。
【解決手段】センサ手段102−1〜102−mと送受信手段101の間の接続を、スイッチ手段103により時分割で切り替えることで、送受信手段101の部品点数を抑えた構成で広い測角範囲がカバーされる。また、2台の目標検出装置のみを用いて目標の定位を行う場合、2台の装置のそれぞれがカバーする角度範囲の両方に共通する領域の情報や、一方の装置から各目標を経由して他方の装置に至る総合伝搬距離情報を用いて、円の方程式の組み合わせの曖昧さに起因する誤検出を防止する。
(もっと読む)
ネットワークセンサ装置
【課題】既存レーダシステムへの改修を最小限に抑えて、他センサシステム由来のセンサ情報と既存のレーダシステムの情報とを融合表示可能にする。
【解決手段】他センサシステム300からの時刻毎の当該他センサによる観測情報を、既存レーダシステム200の位置情報に基づいて既存レーダシステム向けの変換済他センサ観測情報に変換する情報変換部101と、センサ部203で観測し、表示部201で表示するようにした形式の自センサ観測情報を受信し、当該観測情報と変換済他センサ観測情報とを照合して自センサ観測情報の時刻列に合わせた時刻同期変換済他センサ観測情報を生成し、自センサ観測情報と時刻同期変換済他センサ観測情報の相関に従って観測対象の割り当てを行って融合センサ情報を算出し表示するために出力する融合部102を備える。
(もっと読む)
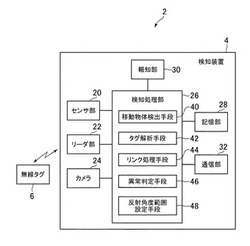
個別認識装置及び個別認識システム
【課題】
識別情報が記録されたICタグを貼付されている複数の対象物に対し、各物体を自動的に識別し個々の移動予測を行なう個別認識装置と個別認識システムを提供する。
【解決手段】
識別情報が記録されたICタグを貼付されている複数の対象物に対し、各物体を自動的に識別し個々の移動予測を行なう個別認識装置であって、センシング中央にセットしてセンサ周囲の環境形状を測定するレーザーレンジファインダと、各物体に貼付されたICタグに記録された情報を蓄積したデータベースと、システム中心から各物体の距離を読み取れるICタグリーダと、レーザーレンジファインダで得た環境形状変化と、ICタグリーダで得たICタグ情報と、システム中心から前記各物体までの距離変化から、データベースに蓄積した情報を元に、各ICタグが添付された対象物情報、位置、移動ベクトルを算出し、各対象物の移動予測を行ない各対象物を認識する判別器から構成した個別認識装置及び個別認識システムである。
(もっと読む)
移動体の速度測定装置及び速度測定方法
【課題】本発明の目的は、ノイズ波の干渉を防止するとともに、車両の上下動や走行路面の凹凸により速度の計測に誤差が生じるのを防止することが可能な移動体の速度測定装置を提供することである。
【解決手段】移動体2の底面2aに設けられ、移動体2の走行方向Xに対して傾斜した送信波3を走行路面20に向けて放射するとともに走行路面20から反射した反射波5を受信するように構成された送受信器8と、送信波3と反射波5との間の周波数偏移量△fから移動体2の速度Vを計算する速度計算手段7とを備えている移動体2の速度測定装置1において、送受信器8は、円偏波を送受信するように構成され、送受信器8は、所定の旋回方向の円偏波を放射し、旋回方向と反対方向の円偏波のみを受信するように構成されている。
(もっと読む)
物体検出装置
【課題】反射強度の入力が不安定な場合には、物体の位置情報を推定することができる。
【解決手段】電磁波センサ30及び画像センサ31と、反射強度が所定値より低いか否かを判定する強度判定部21と、車両進行方向における物体Hの速度成分が所定値より低いか否かを判定する速度判定部22と、強度判定部21によって反射強度が所定値より低いと判定され、速度判定部22によって速度成分が所定値より低いと判定された場合には、車両4の移動量Zに基づいて、物体Hと車両4との相対距離Z2を算出する相対距離算出部23と、画像情報から物体Hの方位情報Y2を取得し、方位情報Y2及び相対距離Z2に基づいて物体Hの位置を推定する位置推定部24とを備えることで、画像センサ31で入力した画像情報を用いて、物体Hの位置情報を推定することができる。
(もっと読む)
車載用レーダ装置
【課題】
高精度な車載用レーダ装置を提供する。
【解決手段】
車載用レーダ装置は、周期毎に二つの電圧を切り替えながら徐々に減少するように変化する制御電圧波形を生成する2周波Ramp変調処理部(401)と、2周波変調処理部で生成した制御電圧波形を補正する変調補正処理部(403)と、変調補正処理部からの出力電圧値に依存した周波数信号を生成する電圧制御型発振器(404)と、周波数信号を送信電波として空間中に放射するための送信アンテナ(405)と、送信アンテナから放射された送信電波がターゲットから反射された電波を受信するための受信アンテナ(406)と、周波数信号と受信アンテナにて受信された受信信号とを混合してビート信号を生成するミキサ(407)と、ビート信号に基づいて、電圧制御型発信器の非線形特性を補正するための情報を算出し、この情報を変調補正処理部に出力する信号処理部(410)とを有する。
(もっと読む)
追尾装置
【課題】高精度で測角して追尾性能を向上させることができる追尾装置を提供する。
【解決手段】空中線6と、空中線からのモノパルスビームを用いて行われる通常アンテナ開口によるモノパルス測角により、目標を所定の角度範囲に追尾するモノパルス測角処理部101と、モノパルス測角処理部により所定の角度範囲に追尾された目標を、空中線からのモノパルスビームを用いて行われる合成開口によるモノパルス測角により高角度分解能で追尾する高角度分解能処理部102を備えたことを特徴とする。
(もっと読む)
セミアクティブ式誘導装置
【課題】レーザー光の照射時間を短くし、高精度の誘導を行なうセミアクティブ式誘導装置を提供する。
【解決手段】飛しょう体に搭載される誘導装置本体は、パルス光の反射光から追跡目標を抽出するパルス同期反射光抽出部と、追跡目標に反射した可視光又は赤外線のから追跡目標を抽出する光源抽出部とを備える。追跡目標が遠距離にある場合にはパルス光に同期したパルス同期画像を基に誘導開始時に追跡目標を判定し、追跡目標が追跡目標に反射した可視光又は赤外線の撮像画像から判定するに十分な距離に近づいたとき可視光又は赤外線の撮像画像から追跡目標を判定するように選択を切替える。
(もっと読む)
センサ融合ナビゲーションのためのシステムおよび方法
【課題】精密なナビゲーションを実施できるナビゲーション・システムを提供する。
【解決手段】ナビゲーション・システムは、複数のナビゲーション・センサを備え、複数のナビゲーション・センサのそれぞれは、剛体の複数の状態(剛体状態)のうちの少なくとも1つについてのデータを提供するように構成され、それによって複数の剛体状態のそれぞれについてのデータが複数のナビゲーション・センサのうちの1または複数のものによって提供されるようにし、複数のナビゲーションセンサのうちの1つがステレオ・ビジョン・センサであり、また、ナビゲーション・システムは、複数のナビゲーション・センサに結合された処理装置を備え、処理装置は、複数の剛体状態のそれぞれについてのデータを統合して、複数の剛体状態のそれぞれについての組合せ状態推定を得るように構成される。
(もっと読む)
車両用周辺監視装置
【課題】障害物等の不要な誤検出を抑制することが可能な車両用周辺監視装置を提供すること。
【解決手段】自車両前方に延在する所定前方領域内の障害物を監視する前方監視手段と、所定前方領域に比して自車両の側方側に延在する所定前側方領域内の障害物を監視する前側方監視手段と、を備える車両用周辺監視装置であって、自車両が側壁を有する所定道路を走行しているか否かを判定する所定道路走行判定手段を備え、所定道路走行判定手段により所定道路を走行していると判定された場合には、前側方監視手段による監視を抑制することを特徴とする。
(もっと読む)
乗物または設備のための操舵および安全システム
乗物または設備のユーザが、乗物または設備の周囲状況および乗物または設備自体に関する高度でかつ最新の情報を取得することを可能にするための、乗物用システムが提供される。このシステムは、海洋船の上に位置してもよく、また、船上と船外の両方に位置する多数の異なる情報源からの情報を統合する。それらの情報は、船舶上の高度なレーダーおよびソナーサブシステムからの情報、従来の機器およびセンサからの情報、ならびに陸上のコントロールセンターからアクセスされる陸上および海上設備およびEO衛星からの情報を含む。このシステムは、利用可能である場合、通信衛星および/または無線インターネットによってコントロールセンターと通信してもよい。データを処理し、提示するためのデータ処理装置もまた提供される。データは、空間内において3次元で受信され、処理され、提示され、時間がデータに対して4つめの次元を提供するように、リアルタイムまたはほぼリアルタイムに更新される。データを提示するためのグラフィカルユーザインターフェースも提供される。このグラフィカルユーザインターフェースは、エンドユーザ自身の観測結果が提示されたデータに一致しない場合、システムにおいてエラーを報告するための機能を提供する。さらに、2つ以上の船舶を含むデータを収集するシステム、コントロールセンター、ならびに、船舶およびコントロールセンターが通信する手段が提供される。このシステムは、収集されたデータを記憶するカタログおよび記憶ネットワークを備える。すべてのデータは、データの関連する品質尺度と共に記憶される。  (もっと読む)
(もっと読む)
飛翔体に対する能動的防御方法
【課題】接近してくる飛翔体を検知して、前記飛翔体の爆発力を軽減するか、前記飛翔体のセンサ機能を低下させるか、あるいは前記飛翔体の進路を誤らせることを可能とした飛翔体に対する能動的防御方法を提供する。
【解決手段】無指向性の送信アンテナ1基及び無指向性の受信アンテナ3基を自動車に配置した無指向性のレーダで飛来する飛翔体8を検知し、飛翔体8が自動車に衝突する箇所を予測し、飛翔体8が衝突する前に自動車側に装備された、衝突箇所付近の火薬箱24を選択的に発火させて飛翔体8の爆発力を減衰させ、自動車の損傷を軽減する。
(もっと読む)
システム航跡測定装置および航跡割当・航跡誤差補正処理方法
【課題】複数のセンサから得られる複数のセンサ航跡を用いて、正確な、センサ航跡の航跡誤差推定、航跡割当およびシステム航跡を生成する。
【解決手段】ローカル航跡とリモート航跡のペアで航跡の組合せを作成し、各組合せの航跡ペアの差分を取って、組合せごとに算出したペアの差分の2乗和の最小値を1つ選択し、その最小値に対応する組合せを航跡割当とし、またペアの差分の2乗の頻度分布の最頻値の中から航跡バイアス誤差分散を算出する航跡割当処理部と、ローカル航跡とリモート航跡の航跡ランダム誤差分散と、航跡バイアス誤差分散に基づいて航跡バイアス誤差を算出する航跡誤差推定処理部と、航跡バイアス誤差分に基づいて補正した補正したリモート航跡とローカル航跡を重み付け統合してシステム航跡を生成する航跡統合処理部を備える。
(もっと読む)
立体物認識装置
【課題】周辺状況を検出するセンサの特性、制御装置による車両安定化の影響度、走行環境等の不確定要因に対して、立体物の認識結果に基づく制御を適切なタイミングで実行可能とする。
【解決手段】ステレオカメラ2の撮像画像に基づく画像立体物の存在確率を画像立体物存在確率算出部11で算出し、ミリ波レーダ3の出力に基づくミリ波立体物の存在確率をミリ波立体物存在確率算出部12で算出し、レーザレーダ4の出力に基づくレーザ立体物の存在確率をレーザ立体物存在確率算出部13で算出する。そして、存在確率補正部14で、画像立体物、ミリ波立体物、レーザ立体物のそれぞれの存在確率を、各認識センサの認識率に基づいて補正し、総合存在確率設定部15で、補正後の存在確率をフュージョンして総合存在確率を設定することで、障害物への接触回避や警報等の制御を確実且つ最適なタイミングで実行可能とする。
(もっと読む)
地球情報分析システム
【課題】陸海大気域の平面および立体データといった地球情報を高精度に分析することができる地球情報分析システムを提供することである。
【解決手段】マイクロ波センサおよび光学センサを搭載したプラットフォームと、前記マイクロ波センサおよび前記光学センサによる検出データを前記プラットフォームから受信する受信部と、前記受信部によって受信した前記マイクロ波センサによる検出データの可視化処理を行う第1の可視化処理部と、前記受信部によって受信した前記光学センサによる検出データの可視化処理を行う第2の可視化処理部と、前記第1の可視化処理部および前記第2の可視化処理部からのデータの補正を行う補正処理部と、前記補正処理部からのデータの分析を行う分析処理部とを備えた。
(もっと読む)
目標検出装置およびシステム
【課題】屋外等の暴露環境に適した安価な目標検出装置または目標検出システムを提供し、監視領域内に侵入した複数の目標を高精度かつ高速に検出する。
【解決手段】センサ手段102−1〜102−mと送受信手段101の間の接続を、スイッチ手段103により時分割で切り替えることで、送受信手段101の部品点数を抑えた構成で広い測角範囲がカバーされる。また、2台の目標検出装置のみを用いて目標の定位を行う場合、2台の装置のそれぞれがカバーする角度範囲の両方に共通する領域の情報や、一方の装置から各目標を経由して他方の装置に至る総合伝搬距離情報を用いて、円の方程式の組み合わせの曖昧さに起因する誤検出を防止する。
(もっと読む)
物体検出装置
【課題】 本発明の目的は、オンラインで正確に距離相当量を補正することの可能な物体検出装置を提供すること。
【解決手段】 本発明の発明は、物体までの距離相当量(距離自体や、ステレオカメラでの視差など)を検出する車載の物体検出装置において、物体までの距離相当量を検出する第一検出手段2R,2Lと、物体までの距離相当量を第一検出手段2R,2Lとは異なる検出原理で検出する第二検出手段3と、第一検出手段2R,2Lと第二検出手段3が、同一物体を検出したか否かを判断する判断手段4と、同一の物体を検出したと判断した場合に、第二検出手段3が検出した距離相当量を、第一検出手段2R,2Lが検出した距離相当量の検出誤差の評価に用いるか否かを判定する判定手段4とを備えることを特徴としている。
(もっと読む)
1 - 20 / 26
[ Back to top ]