
Fターム[5J070BD10]の内容
レーダ方式及びその細部 (42,132) | 組合せ (788) | その他 (106)
Fターム[5J070BD10]に分類される特許
1 - 20 / 106
衝突回避装置、ヘリコプタ、及び衝突回避プログラム
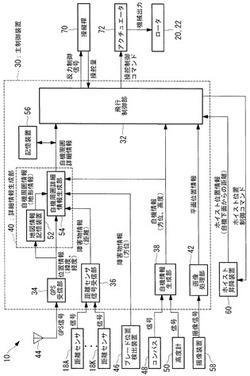
【課題】ヘリコプタが障害物に近接した状態でも、ヘリコプタの障害物への衝突を回避する飛行を可能とする、ことを目的とする。
【解決手段】ヘリコプタ10は、GPS受信部34によって、受信したGPS信号に基づいて自機の位置を検知し、距離センサ18によって、自機と周囲の障害物との距離を測定する。そして、ヘリコプタ10は、詳細情報生成部40によって、地図情報記憶装置52に記憶されている地図情報から距離センサ18で検知した自機の位置を含む自機周囲情報を読み出し、読み出した自機周囲情報と距離センサ18による測定結果とから、自機の周囲の形状を示す自機周囲詳細情報を生成し、飛行制御部32によって、自機周囲詳細情報と自機の大きさとに基づいて、自機が障害物へ衝突することを抑制するための制御を行う。
(もっと読む)
追尾処理装置

【課題】目標に関する状況判断に資する情報が提供される追尾処理装置を提供する。
【解決手段】相関処理部は、監視区域に存在する目標の位置と、追尾中目標の登録予測位置と、登録判定結果に応じて異なる閾値とに基づいて、目標と追尾中目標とが同一かどうか判定する相関処理を実行する。予測処理部は、位置及び登録予測位置に基づいて目標の次回の予測位置を算出する。予測判定部は、位置、目標の種類に対応する斜面移動能力、及び監視区域の地勢情報に基づいて目標が次回に到達し得る目標存在範囲を算出し、予測位置及び目標存在範囲に基づいて目標が予測位置に到達可能かどうかの予測判定を実行し、予測判定の結果で登録判定結果を更新する。目標存在範囲提示部は、目標存在範囲を地図上の領域として提示する。予測変更部は、予測判定の結果が「到達可能」の場合に予測位置で登録予測位置を更新する。
(もっと読む)
方位測定システムおよび方位測定方法
【課題】到来波を受信する装置の大規模化や製造工程の複雑化を回避しつつ、到来波に複数の電波が混信している場合でも、その複数の電波のそれぞれの到来方位を測定する。
【解決手段】到来波を受信する複数の受信局と基地局とを有し、到来波に混信した複数の電波のそれぞれの到来方位を算出する方位測定システムであって、複数の受信局のそれぞれは、到来波に基づく受信信号を独立成分分析法を用いて複数の分離信号に分離して位置情報と時刻情報とを付加して基地局へ送信し、基地局は、付加された時刻情報が一致する複数の分離信号のうちの2つの分離信号の組み合わせのそれぞれに相互相関関数を適用することにより、類似度の高い2つの分離信号の組み合わせを決定し、決定した組み合わせの相互相関関数のピーク値における時間差と、決定した組み合わせのそれぞれに付加された位置情報とに基づいて算出される方位を複数の電波のそれぞれの到来方位とする。
(もっと読む)
車載用レーダ装置
【課題】マルチパスフェージングの発生に類する状況下で、ターゲットの信号強度が急激に小さくなり、測定段階の結果が不安定になっても、車両制御用などの最終的な出力は不安定化させないレーダ装置を得る。
【解決手段】測定部14による各測定ごとのターゲットの位置と相対速度に関わる情報を複数の周期に亘って入力し、時系列で相関があるターゲットを探索しながら、ターゲットの位置および相対速度と、ターゲットの分類と、今回測定周期までの時系列相関成立回数と、今回以前の測定におけるターゲット情報の変動状態と、時系列相関の不成立を許容する回数とを含むターゲットの情報セットを生成する時系列相関部16と、ターゲットの情報セットを記憶する記憶部と、ターゲットの情報セットのうち、予め設定された条件を満足するものだけを出力する結果出力部17とを備える。
(もっと読む)
目標物探知システム、探知方法、及び探知情報処理プログラム
【課題】レーダ,ソナー,又はライダーから成る送受信機を備えた目標物探索システムにあって、S/N比が低く反射信号が雑音に埋設されそうな環境下にあっても、目標物を有効に捕捉することを可能とした目標物探知システムを提供すること。
【解決手段】方位設定が可能で異なる設置位置にそれぞれ配置された目標物探索用の少なくとも二個の送受信機1,2と、この各送受信機1,2により探索された目標物Mの方位にかかる反射情報に基づいて当該目標物Mの位置を特定する位置算出手段12を備えた主制御装置10とを設け、前記位置算出手段12が、前記二個の送受信機1,2によって得られた目標物Mの方位にかかる情報を、前記各送受信機1,2の位置情報を基準として重ね合わせ処理することにより前記目標物Mの位置を特定する機能を備えていることを特徴とする。
(もっと読む)
電波発射源推定方向表示装置及び電波発射源推定方向表示方法
【課題】電波発射源による電波を受信した際に、地図上における自己の位置及び自己の位置に対する電波発射源の推定方向を容易に認識することができる電波発射源推定方向表示装置を提供する。
【解決手段】電波発射源からの電波を受信するアンテナ部と、到来方向を推定する到来方向推定処理部7と、アンテナ部の位置情報を取得するGPS受信機10と、アンテナ部の方位情報を取得する方位センサ11と、GPS受信機10により取得された位置情報に基づいてアンテナ部周辺の地図情報を取得するとともに、到来方向推定処理部7により推定された到来方向と方位センサにより取得された方位情報とに基づいてアンテナ部で受信した電波の到来方位を算出し、算出した到来方位とアンテナ部の位置とを取得した地図情報に重ね合わせて出力する地図表示処理部12と、アンテナ部で受信した電波の到来方位及びアンテナ部の位置を示した地図を表示する表示部13とを備える。
(もっと読む)
角速度推定装置及びコンピュータプログラム及び角速度推定方法
【課題】移動体の角速度を精度よく推定する。
【解決手段】周辺物体観測装置811(レーダ)は、移動体の周辺に存在する物体について、移動体を基準とした物体の相対位置を繰り返し観測する。相対位置取得部211は、周辺物体観測装置811が観測した観測結果を取得する。静止物体判定部220(停止物識別部)は、周辺物体観測装置811が相対位置を観測した物体が静止しているか否かを判定する。物体相関部230(停止物用追尾部)は、周辺物体観測装置811が観測した複数の相対位置のなかから、同一の物体について周辺物体観測装置811が観測した複数の相対位置を判定する。角速度推定部(状態推定部240、軌道推定部)は、移動体の角速度を推定する。
(もっと読む)
車両用除雪装置および車両用除雪システム
【課題】無駄なエネルギーの消費を防ぎつつ、センサ等の性能等を劣化させる積雪を防ぐことを可能とする、車両用除雪システムを提供する。
【解決手段】自車両に備えられた車両用除雪装置であって、上記自車両の位置情報を取得する位置情報取得手段と、上記自車両の位置を含む領域の気象情報を取得する気象情報取得手段と、上記気象情報取得手段によって取得した上記領域の気象情報と、上記位置情報取得手段により取得した上記自車両の位置情報に基づいて、上記自車両の位置情報が降雪エリアに関連があるかどうかを判断する判断手段と、上記自車両への積雪を除去する除雪手段と、少なくとも上記判断手段による判断結果に基づいて、上記除雪手段を制御する制御手段とを備える。
(もっと読む)
測距・通信複合システム
【課題】測距機能と通信機能とを一体化して処理可能な測距・通信複合システムを提供する。
【解決手段】本発明の測距・通信複合システム1は、送信部2と受信部3から構成されており、測距と通信の2つの機能を統合化している。送信部2は、送信回路4、搬送波変調手段5、及び送信アンテナ6から構成されており、受信部3は、受信回路7、検波器8、低雑音増幅器(LNA)9、及び受信アンテナ10から構成されている。送信回路4で行われるデータ変調は、PPM方式を用いている。また、受信回路7は測距と通信の復調処理を並列して行えるよう、測距回路11と通信回路12を別々に設けている。
(もっと読む)
予測装置及び予測システム及びコンピュータプログラム及び予測方法
【課題】観測対象の将来の位置を高い精度で予測する。
【解決手段】観測装置810(位置観測装置)は、移動体(観測対象)の位置を観測する。ジャイロセンサ820(角速度観測装置)は、移動体の角速度を観測する。バイアス補正部141(角速度誤差推定装置)は、観測装置810が観測した位置に基づいて、ジャイロセンサ820が観測した角速度の誤差を推定する。バイアス補正部141(角速度補正装置)は、推定した誤差に基づいて、ジャイロセンサ820が観測した角速度を補正する。運動状態外挿部180(予測位置算出装置)は、バイアス補正部141が補正した角速度に基づいて、移動体の将来の位置を予測する。
(もっと読む)
車載レーダシステム
【課題】ノイズ環境に応じた適切なノイズ対応処理を実施し、物体の誤検出を防止しつつレーダ性能を確保する。
【解決手段】ノイズ源200を中心とする円形の領域を設定し、この円形の領域を、比較的マルチパスの少ない領域R1と、マルチパスの発生が多く、自車両100のレーダ性能に重度の影響が予想される領域R2とに区分する。そして、測位装置からの測位情報により、自車両100の現在位置が領域R1内にあるとき、車載レーダ装置の受信信号のサンプリング間隔と送信電力との少なくとも一方を自車両100の進行方向に応じて変更し、自車両100が領域R2内に進入したときには、ノイズ源の出力の規則性に基づいて受信信号を取得する処理を行う。これにより、ノイズ環境に応じた適切なノイズ対応処理を実施するので、ノイズ環境下においても物体の誤検出を防止しつつレーダ性能を確保することができる。
(もっと読む)
先行車位置判定装置
【課題】GPSによる相対距離および相対速度等の位置情報と、自律センサによる位置情報とを比較して先行車両を特定する際に、複数の他車両が存在する場合はGPSによる位置情報の誤差に応じて比較の閾値を変化させることで、より厳密に先行車を特定することができる先行車位置判定装置を提供することを課題とする。
【解決手段】ECUは、自車両と当該自車両前方を走行する他車両との相対位置に関する相対位置情報、および、当該相対位置の誤差に関する誤差情報を取得し、自車両の直前を走行する先行車の位置を検出し、取得された相対位置情報に基づく相対位置と、検出された位置とを比較して先行車の位置を特定し、複数の他車両の相対位置情報が取得された場合、取得された相対位置情報に基づく相対位置と、検出された位置とを、誤差情報に応じて変化させた閾値を用いて比較して先行車の位置を特定する。
(もっと読む)
マルチラテレーションシステム、マルチラテレーション受信局の信号処理方法、及びその処理プログラム
【課題】複数の航空機の位置情報を抽出するマルチラテレーションシステムにあって、各モードA/C機からの応答情報を不規則に選択処理しシステム負荷の軽減を図ること。
【解決手段】航空機(目標物)が搭載するトラスポンダからのスキッタ信号若しくはSSR応答信号を受信する複数の受信局1,2,…と、この受信された各信号の到達時間差から目標物の三次元位置情報を算出し且つ目標物の識別情報を得る位置情報算出手段(センタ局)120とを備え、各受信局1,2,…は、受信したSSR応答信号を情報分析するSSR応答デコード手段12と、ここで得られたモードSスキッタ,モードS応答,及びモードA/C等のメッセージに編集してセンタ局へ出力するメッセージ生成手段13とを備え、モードA/Cを経時的に不規則に選択して前記メッセージ生成手段13に送り込むモードA/C信号間引手段14を設けたこと。
(もっと読む)
合成開口レーダ装置
【課題】 航空機や衛星等の移動プラットフォームに送信アンテナを搭載し、地上に受信アンテナを設置し、GPS受信機で受信したGPS信号を用いて、送信アンテナと受信アンテナの時刻同期を行うバイスタティック合成開口レーダ装置において、GPS信号の精度が劣化した場合にも、ぼけのない合成開口レーダ画像を得る。
【解決手段】 送信側レーダとは異なる位置に設けられて離間配置された第1、第2の受信用アンテナを設け、第1、第2の受信用アンテナから受信した高周波パルス信号の位相差の観測値から、送信側レーダの時刻同期用信号と受信側レーダの時刻同期用信号の時刻同期誤差を求め、求めた時刻誤差によって第1、第2の受信用アンテナからの高周波パルス信号の位相補正を行い、合成開口処理を行う。
(もっと読む)
鳥獣追跡システム
【課題】電力消費を最小限に抑えつつ、鳥獣の生息環境の即時的な把握が可能な鳥獣追跡システムを提供する。
【解決手段】鳥獣追跡システムは、鳥獣2に装着可能な鳥獣タグ3と、複数の基地局1a,1bと、データセンタ6とを備える。鳥獣タグと基地局とは、夫々の時刻取得装置に基づきビーコンの周期的な送受信の同期を取る。鳥獣タグは、いずれの基地局とも通信圏外にあるときは無線機によるビーコン受信を停止し、動き感知センサが鳥獣の静止状態を検知したときは、GPSセンサによるデータ取得周期を延長させる。また、データ取得時のみ、最小時間、GPSセンサを起動させる。なお、鳥獣タグが通信圏外にあり、かつ、鳥獣タグメモリが満杯であるときは、保存された位置データを時間均等に間引くとともに、GPSセンサによるデータ取得周期も間引間隔に併せて延長させることが好ましい。
(もっと読む)
追尾レーダ装置
【課題】地図情報を用いて不要反射波からの目標誤検出を低減することにより、追尾維持率の改善を図る。
【解決手段】検出処理部31は、地図情報記憶装置50から現在観測中の地域の地図情報を読み出し、当該地図情報から追尾目標の反射波と誤認識する不要反射波を発生する領域を追尾対象外として区分けするプロット検出用フィルタ(52,54,55)を作成し、当該プロット検出用フィルタ(52,54,55)に基づいて追尾対象外の領域を除いた領域からの反射波についてのプロットのみを検出する。
(もっと読む)
レーダ装置およびセンサインタフェース装置
【課題】本発明は、速度センサまたは加速度センサと共に同じ移動体に搭載されたレーダ装置と、これらのセンサの何れかとレーダ装置とのインタフェースをとるセンサインタフェース装置に関し、構成が大幅に複雑化することなく、目標との相対距離が広範かつ急激に増減する状態であっても性能を高く安定に維持できることを目的とする。
【解決手段】波動信号に応じて目標から到来した到来波に基づいて前記目標の速度、距離、位置、性質の何れかの識別を行うレーダ装置であって、前記レーダ装置と共に同じ移動体に搭載された速度センサまたは加速度センサを用いて前記波動信号が送信される方向における前記移動体または前記レーダ装置の速度を特定し、前記速度に応じて前記波動信号に生じるドップラシフトを特定するドップラシフト特定手段を備え、前記レーダ装置は、前記波動信号の周波数を前記ドップラシフトに亘って補正する補正手段を有する。
(もっと読む)
物体検出装置
【課題】他車両が自車両に対して接近しているのか離反しているのかを精度良く検出する。
【解決手段】レーダで自車両の後側方物体を検出する物体検出装置において、前記後側方物体を継続して検出している期間中の所定の時期に検出した自車両と後側方物体との相対距離及び相対速度に基づいて前記後側方物体が自車両から離反する物体であるか否か判定する。実際に接近してくる物体と、実際には離反しているが接近してくると誤認している物体とでは、過去の所定の時期に検出した自車両と後側方物体との相対距離及び相対速度が異なることを利用する。
(もっと読む)
画像処理装置及び無線通信装置及び画像処理方法及び画像処理プログラム
【課題】能動的に電波を放射する無線通信装置を利用しつつ、無線通信装置を利用しない場合と同様の地上のレーダ画像を得て、無線通信装置の位置に基づき、レーダ画像を高精度で補正する。
【解決手段】合成開口レーダ200はチャープ率kでチャープ変調した送信パルスを送信し、地上で反射した信号を受信信号として受信する。RFIDタグ300は送信パルスを受信すると、別のチャープ率k’でチャープ変調した放射パルスを送信し、受信信号の一部として合成開口レーダ200に受信させる。画像処理装置401は、受信信号をチャープ率kでレンジ圧縮する等により通常の地上のレーダ画像を再生する。また、受信信号をチャープ率k’でレンジ圧縮する等によりRFIDタグ300が映った画像を再生し、この画像とRFIDタグ300の位置情報とに基づいて地上のレーダ画像を補正する。
(もっと読む)
画像処理装置及び無線通信装置及び画像処理方法及び画像処理プログラム
【課題】能動的に電波を放射する無線通信装置を利用しつつ、無線通信装置を利用しない場合と同様の地上のレーダ画像を得て、無線通信装置の位置に基づき、レーダ画像を高精度で補正する。
【解決手段】合成開口レーダ200はチャープ変調した送信パルスをパルス繰り返し間隔PRIごとに送信し、地上で反射した信号を受信信号として受信する。RFIDタグ300はチャープ変調した放射パルスを別のパルス繰り返し間隔PRI’ごとに送信し、受信信号の一部として合成開口レーダ200に受信させる。画像処理装置401は、受信信号をパルス繰り返し間隔PRIごとにレンジ圧縮する等により通常の地上のレーダ画像を再生する。また、受信信号をパルス繰り返し間隔PRI’ごとにレンジ圧縮する等によりRFIDタグ300が映った画像を再生し、この画像とRFIDタグ300の位置情報とに基づいて地上のレーダ画像を補正する。
(もっと読む)
1 - 20 / 106
[ Back to top ]