
Fターム[5J070BE02]の内容
レーダ方式及びその細部 (42,132) | マッピング又はイメージング (396) | イメージング (274) | 合成開口レーダによるイメージング (137)
Fターム[5J070BE02]に分類される特許
21 - 40 / 137
物体変位監視装置、及び物体変位監視方法
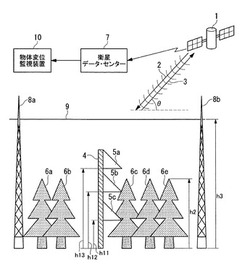
【課題】物体の変位を精度の良く監視する物体変位監視装置、及び物体変位監視方法を提供することを課題とする。
【解決手段】物体変位監視装置は、互いに高さの異なる複数の反射板に照射されたレーダの反射波に基づき生成された測定データから、互いに高さの異なる複数の反射板からの反射波による領域データを抽出し、抽出された領域データを所定の範囲ごとにグループ化し、グループ化された領域データに基づき測定対象物の変位を監視する。
(もっと読む)
レーダ画像処理装置

【課題】干渉信号の帯域幅によらず、合成開口レーダの受信信号から干渉信号を抑圧することによって、合成開口レーダ画像の劣化を防止可能なレーダ画像処理装置を得る。
【解決手段】合成開口レーダ画像に相当する第1の空間周波数領域の信号の非干渉帯域の信号に対して、2次元超解像法により超解像画像を生成し、超解像画像に相当する第2の空間周波数領域の信号を算出する2次元超解像処理手段4と、第2の空間周波数領域の信号を所定の関数で変換し、干渉信号を抑圧する干渉信号抑圧フィルタを生成する干渉信号抑圧フィルタ生成手段5と、干渉信号抑圧フィルタにより、合成開口レーダ画像から干渉信号が抑圧された画像に相当する第3の空間周波数領域の信号を算出する抑圧後信号算出手段と、第3の空間周波数領域の信号に対して、2次元IFFT処理により干渉信号が抑圧された合成開口レーダ画像を生成する2次元IFFT手段8とを備える。
(もっと読む)
画像処理装置及び画像処理方法及び画像処理プログラム
【課題】ScanSARモードで観測されたデータからレーダ画像を効率的に生成する。
【解決手段】画像処理装置100において、バーストデータ記憶部101は、ScanSARの各バーストに対する地上からの散乱波のデータをバーストデータとして記憶装置152に記憶する。スキャンデータ生成部102は、記憶装置152からバーストデータを、対応するスキャンごとに処理装置151により読み出して、スキャンごとに、読み出したバーストデータの隙間をゼロで埋めてスキャンデータを処理装置151により生成する。画像処理部103は、スキャンごとに、スキャンデータ生成部102により生成されたスキャンデータからレーダ画像を処理装置151により生成する。
(もっと読む)
画像処理装置及び監視システム及び画像処理方法及び画像処理プログラム
【課題】合成開口レーダの観測信号を迅速に画像化する。
【解決手段】画像処理装置200は、例えば地上局110a等、地上の1つの地点や、例えば海上保安船110b等、海上を移動する船舶に搭載される。それぞれの画像処理装置200にて、受信部202は、衛星101に搭載された合成開口レーダから送信される電波が海面で反射した散乱波をアンテナ201により受信する。画像処理部203は、受信部202により受信された散乱波から海面のレーダ画像を生成する。物体抽出部204は、画像処理部203により生成されたレーダ画像を解析して海面に存在する船舶102を抽出する。送信部205は、画像処理部203により生成されたレーダ画像や物体抽出部204による船舶102の抽出結果を監視端末300に送信する。
(もっと読む)
画像レーダ装置
【課題】従来、観測目標と一致する候補目標の3次元形状データや観測目標種類が不明の場合、クロスレンジ軸ベクトルの推定ができず、また、クロスレンジ軸ベクトルが一意に定まらず複数種類得られてしまう。
【解決手段】受信高周波信号の目標上の反射強度分布に関するレンジ方向と、クロスレンジ方向を共に高分解能化処理して生成されたレーダ画像上の主軸と高さ軸又は/及び横軸のレーダ画像における夫々の軸の傾きを全軸傾斜計測手段で算出し、画像レーダ装置から目標に向かう方向のレンジ軸単位ベクトルと主軸方向単位ベクトルと目標の高さ軸方向又は/及び目標の横軸方向の単位ベクトルを全軸方向推定手段で得て、レンジ軸単位ベクトルと主軸方向単位ベクトルと目標の高さ軸方向又は/及び目標の横軸方向の単位ベクトルと、レーダ画像上の主軸と高さ軸又は/及び横軸の傾きからクロスレンジ軸ベクトルを推定する。
(もっと読む)
目標物速度特定装置、目標物速度特定プログラム及び目標物速度特定方法
【課題】アジマス圧縮後のSAR画像から高精度に目標物の速度を特定する。
【解決手段】目標物の複数の予測速度を入力する。SARと目標物との相対距離と、合成開口時間とに基づき計算されるアジマス圧縮用の参照関数を、入力された予測速度毎に生成する。特に、所定の場合には、予測速度に応じて合成開口時間の開始時刻と終了時刻とを変化させて参照関数を生成する。入力されたアジマス圧縮後のSAR画像を、一旦アジマス解凍して、アジマス圧縮前のデータに戻し、生成した各参照関数に基づき再びアジマス圧縮して画像を再生する。最も鮮明な画像を再生する際に使用した参照関数を特定し、特定した参照関数を生成する際に用いた予測速度を目標物の速度として特定する。
(もっと読む)
SARデータ処理方法及びSARデータ処理システム
【課題】山岳地域のような地形歪みがある地域におけるバイオマス量の推定を可能とする。
【解決手段】地上の標高に係るDEMデータからSARシミュレーション画像データを作成する(S104)。作成されたSARシミュレーション画像データを、SAR画像データに一致させるようにパラメータを選択する(S106)。一致させたSARシミュレーション画像データとSAR画像データとに基づいて、SAR画像データの地形歪み量を算出する(S107)。SARシミュレーション画像データとSAR画像データとに基づいて、SAR画像データの散乱強度を算出する(S108)。SAR画像データに対し、地形歪み量補正及び散乱強度補正を施し、地形歪みがある地域におけるバイオマス量の推定を行う。
(もっと読む)
水稲作付け状況把握システム、水稲作付け状況把握方法、及び水稲作付け状況把握プログラム
【課題】SARにより撮影された画像に基づいて水稲作付け状況を把握する際に、湛水された圃場を決定する閾値の客観性の確保が難しい。
【解決手段】クラスター分析部60は、圃場に入水し苗を移植する田植え期と、入水前である圃場準備期及び移植した水稲が苗より生長した状態となる水稲生長期の少なくとも一方とを含む2時期又は3時期についての観測対象領域のSAR画像を取得し、観測対象領域の各点での画素値の組をサンプルとしてクラスター分析を行い5クラス以上に分類する。圃場判定部70は、観測対象領域に存在する注目圃場内のサンプルのクラス毎の個数がクラス間での大小関係に関する所定の判別式を満たすか否かに基づいて、当該注目圃場が水稲圃場であるか否かを判定する。
(もっと読む)
ミリ波撮像装置、ミリ波撮像システムおよびプログラム
【課題】観察領域の温度変化に拘わらず、画素間のコントラストが適切に維持された被写体像を生成するための技術を提供する。
【解決手段】放射体3にて放射されたミリ波を基準ミリ波センサ22で受信し、その検出値と基準検出値との誤差を補正値として、各ミリ波センサの検出値を補正する。放射体3は、基準となるミリ波を放射すべく観察領域100に配置されていることから、例えば、観察領域100の温度が上昇すれば、ミリ波としての熱雑音も大きくなる結果、基準ミリ波センサ22の検出値も大きくなる。つまり、基準ミリ波センサ22の検出値と基準検出値との誤差は、観察領域100の温度変化に応じて変動するものであるため、この誤差を補正値として各ミリ波センサ22の検出値を補正すれば、各検出値から観察領域100の温度変化の影響を除去することができる。
(もっと読む)
レーダ画像処理装置
【課題】この発明は、アジマスアンビギュイティ以外の種類の虚像についても検出することができるレーダ画像処理装置を提供する。
【解決手段】パラメータ格納部102には、既知の1分解能を最小単位として処理対象画像をずらす大きさであるシフト量や、処理対象画像をずらす方向等を表すシフトパラメータが予め格納されている。画像シフト処理部103は、パラメータ格納部102に格納されたシフトパラメータのシフト量に基づいて、レーダ画像格納部101に格納された処理対象画像をシフトする。コヒーレンス算出部104は、シフト前の処理対象画像と、シフト後の処理対象画像とについて、相関の度合いを示すコヒーレンスを算出する。虚像判断部105は、コヒーレンス算出部104によって算出されたコヒーレンスに基づいて、処理対象画像内に虚像が存在しているか否かを判断する。
(もっと読む)
マイクロ波イメージングシステム
【課題】超短パルスの反射波信号における物体表面での反射波成分を除去し、マスキングされていた検出対象物からの反射波成分を確実に取得して、物体内の検出対象物の状況を適切に画像化して評価可能とするマイクロ波イメージングシステムを提供する。
【解決手段】超短パルスの周波数帯域内に、検出対象物からの反射波成分が物体内を十分透過できる第一の周波数範囲と、同じ反射波成分でも透過性が低下する第二の周波数範囲を設定し、各周波数範囲に対応する反射波の各信号成分を取得して、第一の周波数範囲に対応する第一の信号成分から、第二の周波数範囲に対応する第二の信号成分を差引き、物体表面での反射波成分を打消すことから、効率よく物体表面での反射波成分を取除いて、第一の信号成分での検出対象物からの反射波成分を相対的に強調でき、画像再構成で検出対象物の画像化を精度よく実行可能となり、得られた画像から検出対象物を適切に検出できる。
(もっと読む)
レーダ画像処理装置
【課題】処理装置の規模を抑えつつ、演算精度の劣化も抑える。
【解決手段】複数の高速フーリエ変換を行うFFT部5,8と複数の逆高速フーリエ変換を行うIFFT部9,12とが直列に接続されており、高速フーリエ変換または逆高速フーリエ変換の演算結果は、複数の固定小数点データとそれらのデータに共通する1つの指数とで表現するブロック浮動小数点形式で出力される。また、固定小数点データに対して、高速フーリエ変換または逆高速フーリエ変換を実施する時、固定小数点データの中に指数が異なるデータが含まれている場合に、それらの指数の調整を行う指数調整部7,11が設けられている。
(もっと読む)
密封された高周波フロントエンド
本発明は、電子部品(3,4)を含むマルチレイヤ構造における高周波フロントエンド(例えば、送信/受信モジュール)であって、マルチレイヤ構造は、上下に重ねられ、且つ、部品(3,4)を支持する、複数の基板(1,2)を備え、基板(1,2)には、溝(7)が形成され、基板(1,2)間には、密封素子(5,8)が設けられ、密封素子は、溝(7)に係合し、且つ、基板(1,2)に接合される。 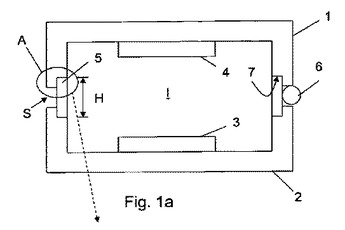 (もっと読む)
(もっと読む)
レーダ装置
【課題】ゴーストの検出を抑え、更に相互相関の程度を抑圧することが可能であるレーダ装置を提供する。
【解決手段】送信アンテナ群と、受信アンテナ群と、送信切替手段と、仮想相関値取得手段と、ターゲット検出手段と、を備え、送信アンテナ群は、受信アンテナ群に包含され、送信切換手段は、受信アンテナ群に含まれる一部又は全部の受信アンテナを順次、送信アンテナとして機能させ、送信アンテナ群及び受信アンテナ群は、左右対称且つ不等間隔に一列に並べる。
(もっと読む)
移動目標検出装置
【課題】地上面を低速度で移動する移動目標をより確実に検出することができる移動目標検出装置を得る。
【解決手段】所定の観測時間差を有する第1の観測地点及び第2の観測地点における観測時期を設定する観測時期設定手段20と、アンテナから取得された2枚のSAR画像を格納するデータ格納部40a、40bと、データ格納部に格納された2枚のSAR画像間の位相差をそれぞれ算出する位相差算出手段50a、50bと、第1の観測地点の位相差から、移動目標の第1の位置および移動速度を特定するとともに、移動目標が移動速度で第2の観測地点まで移動した際の第2の位置を推定する移動目標位置推定手段60と、第1の位置における位相差と、第2の位置における位相差とが、ともに所定閾値よりも大きい場合に、移動目標を真の移動目標と判断する移動目標検出手段80とを備える。
(もっと読む)
合成開口レーダ装置
【課題】同期型DRAMを用いた合成開口レーダ装置で、効率よいデータ転送をし、画像再生の処理時間短縮、装置の軽量化、製品のコストダウンを図る。
【解決手段】SARセンサにより、高周波パルス信号を放射し、目標からの反射信号を受信してSAR画像の受信信号を得、同期型DRAMでSAR画像の受信信号を保持し、アドレス生成手段で同期型DRAM上の受信信号データのアドレス値を生成し、データアクセス手段で、アドレス生成手段により生成されたアドレス値に基づき同期型DRAMへの受信信号データの書き込みおよび同期型DRAMからの受信信号データの読み込みアクセスを行い、同期型DRAMに保持された受信信号をデータアクセス手段で読み込み、画像再生処理手段で画像を再生する。
(もっと読む)
レーダ装置
【課題】 正確に目標を類別できるレーダ装置を得る。
【解決手段】 マッチング処理部6において、受信信号に基づき作成したレンジプロファイルおよびドップラプロファイルと候補目標毎に予め保持する参照情報とを照合してレンジプロファイル相関値およびドップラプロファイル相関値を算出し、類別処理部3において、目標の位置情報や速度情報などを含む追尾情報に基づき各々重み付けされたレンジプロファイル相関値とドップラプロファイル相関値とを用いて目標を類別する。
(もっと読む)
画像処理装置
【課題】地表面に生じた変化を高精度に捉えることができる画像処理装置を得る。
【解決手段】取得時間の異なる同一領域を観測した複数枚のレーダ画像を格納するデータ格納部1と、複数枚のレーダ画像から2枚のレーダ画像を選択して、2枚のレーダ画像の相関分布であるコヒーレンスマップを異なる窓の大きさでそれぞれについて複数枚算出するコヒーレンス算出処理部2と、得られた解像度の異なる各コヒーレンスマップにおける注目画素のコヒーレンスの値から最尤推定処理を実施するコヒーレンス最尤推定処理手段(尤度関数算出部20及び最尤推定処理部30)と、推定されたコヒーレンスの結果を格納する出力格納部2とを備える。
(もっと読む)
車両速度計算装置及び車両速度計算方法及び車両速度計算プログラム
【課題】レーダの観測データから車両の速度を高精度で求める。
【解決手段】車両速度計算装置100において、車両検出部103は、合成開口レーダ(SAR)によって、道路が敷設された地域を観測し、その結果として得られたレーダ画像201から、道路の近傍に存在する車両を検出する。ドップラシフト量推定部104は、道路301の位置と車両検出部103が検出した車両のレーダ画像201における位置との間の距離に基づいてドップラシフト量を推定する。速度計算部105は、ドップラシフト量推定部104が推定したドップラシフト量を車両検出部103が検出した車両の速度へ換算する。
(もっと読む)
レーダ受信機
【課題】移動しながら広範囲の信号を送受信するレーダ装置の場合に、受信機における受信信号の飽和を防止するようにAGCを制御することによって、受信系のダイナミックレンジを有効に利用可能にする。
【解決手段】開示されるレーダ受信機は、合成開口レーダのレーダ受信機であって、高周波パルスを目標に対して送信し、目標からの反射パルスを受信するレーダアンテナ1と、前記受信波を増幅する入力増幅器2と、入力増幅器の出力を周波数変換して出力するミキサ回路3と、ミキサ回路の出力信号を分岐する分岐器4と、分岐器で分岐された一方の出力信号を整流する整流器5と、整流器の整流信号によってSTCパターンを生成するSTC回路6と、前記分岐器の他方の出力信号をSTC回路で生成されたSTCパターンに対応する減衰制御信号に応じて可変減衰させる可変減衰器7と、可変減衰器の出力信号を増幅して出力する出力増幅器8とを備えている。
(もっと読む)
21 - 40 / 137
[ Back to top ]