
Fターム[5J070BE02]の内容
レーダ方式及びその細部 (42,132) | マッピング又はイメージング (396) | イメージング (274) | 合成開口レーダによるイメージング (137)
Fターム[5J070BE02]に分類される特許
41 - 60 / 137
ポラリメトリSAR装置及びポラリメトリSARデータを用いる目標物同定方法
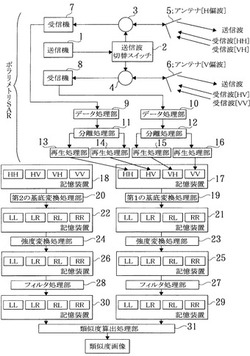
【課題】地物の向き及び撮像方向による影響を軽減させながら、撮像された地物を任意の形状のものと定量的に同定する。
【解決手段】提供されるポラリメトリSAR装置は、第1の基底変換処理部19が撮像された地物のフルポラリメトリデータに基づいて第1のフルポラリメトリ複素画像を算出し、第2の基底変換処理部20が既知の地物のフルポラリメトリデータに基づいて第2のフルポラリメトリ複素画像を算出する。強度変換処理部23とフィルタ処理部27を経由した第1のフルポラリメトリ複素画像と、強度変換処理部24とフィルタ処理部28を経由した第2のフルポラリメトリ複素画像は、類似度算出処理部31によって類似度が算出される。類似度算出処理部31は、算出された類似度rの値が所定値より高いときに撮像された地物を既知の地物によって定量的に同定する。
(もっと読む)
画像レーダ装置及び信号処理装置

【課題】レーダの移動に伴いレーダビームの照射方向を変化させる複数ビーム観測方式を実現する画像レーダ装置及び信号処理装置を得る。
【解決手段】同一または異なるプラットフォームに送信アンテナ及び複数の受信アンテナを搭載する画像レーダ装置であって、前記送信アンテナ及び複数の受信アンテナは、レーダの移動に伴いレーダビームの指向方向を変化させながら観測する。また、送受信アンテナ間隔の2乗をレーダ波長と観測対象領域のレンジとの積の2倍で割ったものに円周率を乗じた位相を持つ複素関数が1とみなせるように、送受信アンテナ間隔、レーダ波長、観測対象領域までのレンジを設計する。
(もっと読む)
人工物検出装置及び人工物検出方法及び人工物検出プログラム
【課題】多偏波観測によって人工物のみを精度よく検出する。
【解決手段】合成開口レーダを用いた4偏波観測の結果を偏波特性データ201として予め記憶する人工物検出装置100にて、散乱成分抽出部101は、偏波特性データ201から、表面散乱成分と2回散乱成分と体積散乱成分とヘリックス散乱成分とを、観測位置ごとに抽出する。人工物検出部104は、散乱成分抽出部101により2回散乱成分と体積散乱成分とヘリックス散乱成分とのうち1種類以上の散乱成分が抽出された観測位置の集合である第1領域と、第1領域の周囲で散乱成分抽出部101により所定量以上の表面散乱成分が抽出された観測位置の集合である第2領域とを含む領域を、人工物として検出する。
(もっと読む)
レーダ装置
【課題】複数の異なる観測形態について同時に観測することを可能にしたレーダ装置を提供する。
【解決手段】相関処理のための観測モード毎に異なる信号系列情報を生成する制御手段(1)と、各観測モード毎に前記信号系列情報に従ってパルス毎に位相を0またはπに切替えたパルスのチャープ信号による照射波を生成し、観測方向に照射し、対象物からの反射波を受信するアンテナ手段(2,3,4,5,6)と、前記アンテナ手段で受信された信号を各観測モード毎にそれぞれの前記信号系列情報で相関処理を行いそれぞれの信号のみを圧縮する相関処理手段(7)と、各観測モード毎の相関処理の施された信号に画像処理を行ってそれぞれの観測モードの画像を生成する画像処理手段(8)と、を備えた。
(もっと読む)
人工物検出装置及び人工物検出方法及び人工物検出プログラム
【課題】多偏波観測によって人工物のみを精度よく検出する。
【解決手段】合成開口レーダを用いた2偏波観測あるいは4偏波観測の結果を偏波特性データ201として予め記憶する人工物検出装置100にて、散乱成分抽出部101は、偏波特性データ201から、表面散乱成分と2回散乱成分とを、観測位置ごとに抽出する。人工物検出部104は、散乱成分抽出部101により2回散乱成分が抽出された観測位置の集合である第1領域と、第1領域の周囲で散乱成分抽出部101により所定量以上の表面散乱成分が抽出された観測位置の集合である第2領域とを含む領域を、人工物として検出する。
(もっと読む)
レーダシステム
【課題】単体で方位の異なる複数目標の同時観測を行い、各目標の高分解能画像を取得できるレーダシステムおよび信号処理方法を提供する。
【解決手段】航空機11が観測目標4を追尾し画像化するシステムにおいて、ビーム12を次々に切替えながらLPRF以上のパルスを送信する。すなわち、現状では送信した後ずっと目標方向を見ていたビーム12を、他方位の観測目標にも向けて観測を行う。ISAR画像解析において、本当に必要なのは観測目標4からの反射波だけであるので、受信ゲート14を開くタイミングを制御することで、受信ゲート14を従来の1目標あたりのPRI17よりも十分に小さくすることができる。このように、ビーム制御機能とタイミング制御機能を付加することで、多方位の複数の目標を同時に観測することができる。
(もっと読む)
画像変化抽出装置
【課題】地表面に生じた物理的な変化をより高精度に抽出し、変化の空間的連続性を正しく表示する画像変化抽出装置を提供する。
【解決手段】コヒーレンスマップを対象に、ノイズ除去を行うノイズ除去部2と、ノイズ除去後の画像から特徴量抽出を行う特徴量抽出部6と、コヒーレンスマップを構成する画素のコヒーレンスの時間的、空間的平均値を算出するコヒーレンス平均算出部3と、コヒーレンスマップの時系列変化情報を用いて、変化抽出を行う変化抽出部4と、変化の発生時刻のずれを検出し、時刻調整を行う変化時刻調整部5と、変化選別を行い変化選別後の変化選別画像データを全体の出力とする変化選別部7とを備える。
(もっと読む)
電磁高周波放射線を使用して物体の像形成を行うための方法およびデバイス
本発明は電磁高周波放射線を用いて物体(4)の像形成を行うためのデバイスであって、電磁高周波放射線のための少なくとも1つの検出器(1)と焦点を生成するための少なくとも1つの像形成デバイス(3a,b,c)とを包含する。電磁高周波放射線を用いて物体の像形成を行う装置及び方法を提供するために、本装置/方法は高い解像度で物体の急速な移動を記録することができるものであって、放射線の方向を変化させるための少なくとも1つのコントロールな可能な要素(2a,b,c)を有し、それが前記像形成デバイスの焦点が可動となるように適合されている。 (もっと読む)
植生生育状況解析方法、プログラムおよび植生生育状況解析装置
【課題】人工衛星等の飛翔体から得られるレーダ画像を利用して、多時期の植生の生育状況を正確に解析できるようにする。
【解決手段】飛翔体に搭載されたレーダ装置で複数の時期に撮影された、同一対象エリアの地表面のレーダ画像を取得し、取得された複数のレーダ画像を地図データベースに保存する。次に、所定時期に撮影されたレーダ画像を基準画像として、他の時期に撮影されたレーダ画像の位置合わせを行った後、前記レーダ画像の特定領域の後方散乱係数を抽出する。さらに、前記地図データベースに保存された複数のレーダ画像のうち、前記基準画像の特定領域の後方散乱係数を基に、他のレーダ画像の後方散乱係数を較正する。そして、レーダ画像の後方散乱係数と植生の生育値の相関関係に基づいて、前記較正されたレーダ画像の後方散乱係数から当該レーダ画像に写っている植生の生育値を算出する。
(もっと読む)
画像レーダ装置
【課題】1偏波送信・2偏波受信の信号から2偏波送信・2偏波受信の信号を推定する際の適切な反復処理を可能にした画像レーダ装置を提供する。
【解決手段】受信した1偏波送信・2偏波受信の信号の反復処理により2偏波送信・2偏波受信で得られる信号の共分散行列を推定する成立性・収束判定型偏波特性2次統計量推定手段が、1偏波送信・2偏波受信の信号の反復処理により非線形の方程式を解き共分散行列を推定する手段10,11,12,13,13a、反復処理される共分散行列の推定値から2偏波送信・2偏波受信の信号の共分散行列推定不可能領域を判定する手段16、共分散行列推定可能領域で共分散行列の連続する2回の反復推定結果を比較する共分散行列の同一性を検定する手段17、前記比較結果を受けて、反復処理される共分散行列推定値が収束していることに基づき反復処理の終了を判定する手段18を含む。
(もっと読む)
画像レーダ装置
【課題】PRFの倍増を防ぎ、クロストラック方向の観測幅の減少を防ぐことのできる画像レーダ装置を得る。
【解決手段】送信方向を制御可能な互いに異なる第1および第2の偏波面を有する2つの送受信用のアンテナサブアレイ8a、9aと、送受信アンテナサブアレイに給電する送信手段1、3a、3bと、送受信アンテナサブアレイについて2本以上の受信ビームを形成しながら、送受信アンテナサブアレイで同時に受信する受信手段2、3a、3b、6a、7aと、受信手段で得られた受信信号に対してそれぞれ合成開口レーダ画像を再生する合成開口レーダ画像再生手段11a、11bとを備えている。送信手段は、送信開始から所定時間にわたって連続的に第1の偏波によるパルスを繰り返し送信し、所定時間を越えた後は、連続的に第2の偏波によるパルスを繰り返し送信し、受信手段は、常に第1および第2の両方の偏波でパルス信号を受信する。
(もっと読む)
干渉合成開口レーダシステム、処理方法、指向角度補正装置、指向角度補正方法及びプログラム
【課題】2回の観測間における合成開口レーダの軌道が平行でない場合における観測データ間の相関度を改善する。
【解決手段】地上の解析装置において、合成開口レーダ衛星100の1回目の観測における軌道及び2回目の観測における軌道を算出し、1回目の観測における軌道と2回目の観測における軌道とが成す軌道交差角を算出する。解析装置は合成開口レーダ衛星100に軌道交差角の情報を送信し、合成開口レーダ衛星100は、軌道交差角に基づいてアンテナの指向性の角度を制御する。
(もっと読む)
干渉合成開口レーダシステム、処理方法、飛行体制御装置、飛行体制御方法及びプログラム
【課題】高度が異なる複数の合成開口レーダ間で観測対象物を一致させ、2つの衛星の観測データ間の相関を適切に保つ。
【解決手段】合成開口レーダ衛星200の軌道と合成開口レーダ衛星100が観測した観測対象物の位置とに基づいて合成開口レーダ衛星200のオフナディア角θ2を算出し、合成開口レーダ衛星200のオフナディア角が算出したオフナディア角θ2になるように合成開口レーダ衛星200のアンテナの指向性を設定する。次に、合成開口レーダ衛星100のオフナディア角θ1と合成開口レーダ衛星100が放射する電波の周波数帯域f1±B1/2と算出した合成開口レーダ衛星200のオフナディア角θ2とに基づいて合成開口レーダ衛星200が放射する電波の周波数帯域f2±B2/2を算出し、合成開口レーダ衛星200が放射する電波の周波数帯域を算出した周波数帯域f2±B2/2に設定する。
(もっと読む)
画像処理装置
【課題】様々な条件で撮像した場合でもアンビギュイティ(AB)信号の低減を可能にした画像処理装置を得る。
【解決手段】外部からの撮像条件に従い位置情報を算出する信号発生条件出力部1、取得する画像と同周波数帯で撮像された画像を供給するAB信号リファレンス画像供給手段2、信号発生条件出力部1の画像の位置情報をもとにAB信号リファレンス画像供給手段2の画像から対象となる画像を抽出するAB信号リファレンス画像抽出部3、AB信号リファレンス画像抽出部3で抽出した画像をスレッショルドレベルより低いレベルの部分を削除しAB信号フィルタ画像を出力するAB信号フィルタ画像出力部4、AB信号フィルタ画像出力部4のAB信号フィルタ画像と外部からの撮像画像の相関処理を行い相関が高い部分をAB信号と判断し撮像画像からAB信号を削除するAB信号相関処理部5を含む。
(もっと読む)
画像レーダ装置および画像レーダシステム
【課題】演算量が少なく、計算負荷および計算要求の小さな画像レーダ装置および画像再生装置を得る。
【解決手段】1つの送信アンテナ10と複数の受信アンテナ11及び12を用いて、送信アンテナ10から放射され観測対象で反射されたレーダビームを複数の受信アンテナ11及び12で受信する画像レーダ装置であって、受信アンテナ11及び12と送信アンテナ10との間隔の2乗がレーダ波長と観測対象のレンジとの積の2倍に比べ十分に小さくなるようにした。
(もっと読む)
レーダ画像再生装置
【課題】従来は、レンジ圧縮後の2次元信号上で復元フィルタを適用しエイリアシング誤差を解消していたがレンジドップラー領域において、1散乱点信号はレンジセルマイグレーションを持ちレンジ方向に広がるため演算量が多く、復元フィルタ適用後の合成信号格納用記憶容量も大きかった。
【解決手段】複数の受信アンテナで同時受信した観測信号を複数の格納部に夫々格納し格納した信号を複数のレンジ圧縮部で夫々レンジ圧縮し、レンジ圧縮した信号を複数のレンジセルマイグレーション補正部で夫々レンジセルマイグレーション補正し、補正信号を複数のコヒーレント加算部で夫々コヒーレントに加算し、加算結果に複数の復元フィルタ部で夫々復元フィルタを適用し、復元フィルタの適用結果を合成部で合成してアジマス方向のエイリアシングエラーを相殺解消した出力をアジマス圧縮部でアジマス圧縮を行う。
(もっと読む)
レーダ画像処理装置
【課題】スクイント角を含む記録データに対しても、画像再生過程においてレンジ方向のリサンプリングを実行し、高精度なレーダ画像のレジストレーションを実現することができるレーダ画像処理装置を提供する。
【解決手段】観測対象に対して異なる複数の方向から送信され、観測対象で反射されたレーダビームを受信して得られた記録データに基づいて、レーダ画像を再生するレーダ画像処理装置であって、画像再生過程において、記録データに対して、レンジ方向のサンプリング間隔の伸縮変更を実行するとともに、観測時のスクイント角に対応するドップラー中心周波数のオフセット補正を実行する画像再生部2を備えたものである。
(もっと読む)
目標物検出システム
【課題】 金属材質の目標物を対象とする場合において、少ない演算処理負荷により、的確に目標物の検出を行うことが可能な目標物検出システムを提供する。
【解決手段】 探索対象画像中において、金属材質を対象とする候補画素を選定した後、候補画素の1つを検出し(S501)、検出された候補画素より右方向に隣接した候補画素を順次探索する(S502)。右方向に候補画素がN個連続しない場合には(S503)、検出画素より下方向に隣接した候補画素を順次探索する(S504)。右方向、下方向のいずれかで候補画素がN個連続した場合には(S505)、連続するN個の候補画素の平均値、最大最小値を算出し(S506)、平均値が所定値以上で、最大値と最小値の差が所定値以下である場合には(S507)、連続するN個の候補画素を全て目標物非存在領域に修正し、修正した画素の隣接画素も順次目標物非存在領域に修正する(S508)。
(もっと読む)
目標物検出システム
【課題】 金属材質の目標物を対象とする場合において、探索すべき対象を漏らさず、かつ探索の処理負荷を軽減するため、探索範囲を的確に絞り込むことが可能な目標物検出システムを提供する。
【解決手段】 探索対象画像中から目標物を探索するにあたり、事前に目標物が存在する可能性が高い部分のみを探索対象領域として設定する。その際、4×4の画素ブロックに適用するための画素評価算出式、画素判定基準値、画素評価算出式により算出される画素評価値と画素判定基準値の関係による設定条件を定めるが、画素判定基準値については、利用者による探索対象の指定に従い(a)、指定された箇所が探索対象として設定されるような値を設定する。さらに、利用者による探索非対象の指定に従い(b)、指定された箇所が探索非対象として設定されるように既に算出された画素判定基準値を補正する。
(もっと読む)
画像レーダ装置
【課題】目標の相対運動と3次元形状を推定することのできる画像レーダ装置を得る。
【解決手段】目標に対して送信電波を照射するための送信機1及び送受信アンテナ3と、前記送信電波が前記目標で反射された反射電波を受信する、互いに異なる位置に配置された複数の受信用補助アンテナ4,5および受信機6〜8と、前記複数の受信用アンテナおよび受信機で受信された前記受信電波に基づき、前記目標のレーダ動画像を再生するレーダ画像再生部9と、前記レーダ画像再生部で連続的に再生された複数のレーダ動画像を用いて目標の運動及び形状を推定する目標運動・形状推定手段11とを備える。
(もっと読む)
41 - 60 / 137
[ Back to top ]