
Fターム[5J070BF00]の内容
レーダ方式及びその細部 (42,132) | 衝突防止 (1,451)
Fターム[5J070BF00]の下位に属するFターム
危険度判定 (267)
監視方向又は範囲 (317)
衝突回避 (511)
進路変更に関するもの(右左折又は追越) (17)
カーブ走行路に関するもの (40)
先行車の判別に関するもの (83)
レーダデータと他のデータとの結合 (112)
固定物との衝突防止 (59)
入出港時、係留時の衝突防止 (4)
その他 (8)
Fターム[5J070BF00]に分類される特許
1 - 20 / 33
レーダーシステム及びその製造方法
送信アセンブリ(10)、受信アセンブリ(20)、制御部(30)及び信号処理部(40)を含むレーダーシステム(100)について述べる。送信アセンブリ(10)は、入力信号(31)を受信し、入射レーダー信号(2)を送信する。送信アセンブリ(10)は、レンズキャビティ(74)、複数のビームポート(60)、複数のアレイポート(62)及びパッチアンテナアセンブリ(14)を有するRotmanレンズ(12)を含む。レンズキャビティ(74)は、10ミクロン〜120ミクロン、好ましくは40ミクロン〜60ミクロンのレンズギャップ(h)を有する。パッチアンテナアセンブリ(14)は、Rotmanレンズ(12)から複数の時間遅延同相信号を受信し、入射レーダー信号(2)をターゲット(4)に向けて送信するように動作可能な複数のアンテナアレイ(130)を含む。受信アセンブリ(20)は、反射レーダー信号(6)を受け取り、出力信号を生成する。信号処理部(40)は、入力信号(31)を出力信号と比較し、ターゲット(4)のレンジ、速度及び位置を決定するアルゴリズムを実施する。 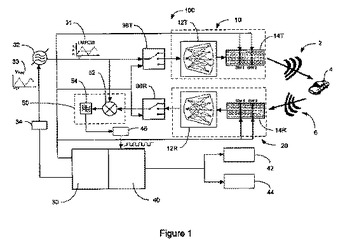 (もっと読む)
(もっと読む)
物体検出装置
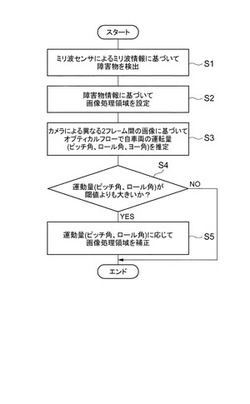
【課題】自車両の挙動が変化した場合でも適切な画像処理領域を設定することができる物体検出装置を提供することを課題とする。
【解決手段】自車両周辺を撮像した画像における特定の画像処理領域に対して画像処理を行い、自車両周辺の物体の情報を取得する物体検出装置であって、自車両周辺の物体の位置情報を取得する位置情報取得手段(S1)と、自車両周辺を撮像する撮像手段と、位置情報取得手段で取得した物体の位置情報に基づいて撮像手段で撮像した画像における画像処理領域を設定する画像処理領域設定手段(S2)と、自車両の挙動の変化を検出する車両挙動検出手段(S3)と、車両挙動検出手段で検出した自車両の挙動の変化に応じて画像処理領域設定手段で設定した画像処理領域を補正する補正手段(S5)を備えることを特徴とする。
(もっと読む)
物体検知装置

【課題】広範囲に存在する物体を検知し、複数の物体間の距離を求めることが可能な、物体検知装置1を提供する。
【解決手段】電磁波を走査し物体からの反射波を受信して物体を検知するレーダ10と、レーダ10の向きを変化させるモータ10aと、画像を撮影するカメラ20と、カメラ20で撮影した画像を表示するディスプレイ30と、ディスプレイ30により表示された画像上でレーダ10の走査範囲を設定するタッチパネル30aと、設定された走査範囲に基づいてレーダ10を走査する制御手段40と、を備える構成とした。
(もっと読む)
探知測距装置および探知測距プログラム
【課題】レーダー等の複数の探知機で求めた相対距離等に基づいて、単純な計算で正確な相対速度ベクトルを求めることができる探知測距装置および探知測距プログラムを提供すること。
【解決手段】送信した電磁波の被探知物体での反射波を受信することにより被探知物体までの相対距離を測定する第一の相対距離測定手段と、第一の相対距離測定手段と異なる位置に配置され、送信した電磁波の被探知物体での反射波を受信することにより被探知物体までの相対距離を測定する第二の相対距離測定手段と、第一の相対距離測定手段によって測定した相対距離と第二の相対距離測定手段によって測定した相対距離とに基づいて、第一の相対距離測定手段から被探知物体に対する方向又は第二の相対距離測定手段から被探知物体に対する方向に対して任意の角度を成して移動している被探知物体の実速度ベクトルを算出する実速度ベクトル算出手段とを備える。
(もっと読む)
車載電波レーダ装置
【課題】コストの上昇を抑制しつつ、ピンから放射されるノイズが筐体内の回路基板全体に広がることを抑制する車載電波レーダ装置を得る。
【解決手段】車に取付けられ、レーダビームを放射し、被検出物体により反射されたレーダビームを受けて、車から被検出物体までの距離および車と被検出物体との相対速度を検出する車載電波レーダ装置1において、導電性の筐体2と、筐体2の内部に設けられた信号処理回路基板3と、ピン5aが信号処理回路基板3に接続され、筐体2の外部に設けられた外部装置と電気的に接続可能なコネクタ5と、筐体2の内部に設けられ、信号処理回路基板3のグランドプレーン6と当接し、筐体2とともにコネクタ5を内包する導電性の仕切り板7とを備え、筐体2と仕切り板7とにより、ピン5aから空間へ放射されたノイズがコネクタ内包空間2aの外へ放出されるのを抑制する。
(もっと読む)
物標検出装置、物標検出方法、およびコンピュータが実行するためのプログラム
【課題】ピーク周波数成分が低周波領域に埋もれた状態から復帰してきた場合に、このピーク周波数成分が折り返しピーク周波数成分であるか否かを高精度に判定し、衝突寸前まで高精度な物標検出を行うことが可能な物標検出装置を提供することを目的とする。
【解決手段】本発明に係る物標検出装置は、FMCW方式を用いて検出した信号に周波数解析処理を施すことによって得られるピーク周波数成分のペアを用いて物標検出を行う第1の検出手段と、前記第1の検出手段と異なる方式で物標検出を行う第2の検出手段と、低周波数成分に埋もれていた前記ピーク周波数成分のペアの一方が復帰した場合、前記第2の検出手段の検出結果に基づいて、当該復帰したピーク周波数成分が折り返しピーク周波数成分であるか否かを判定する判定手段と、前記判定手段の判定結果に基づいて、前記第1の検出手段の物標検出方法を選択する選択手段と、を備えている。
(もっと読む)
車両の外装部品及びその製造方法
【課題】電波透過性に優れ、意匠性に富む車両の外装部品の製造コストの低減を課題とする。
【解決手段】車両のフロントエンド部分にレイアウトされた電波レーダユニットの前方に配設された車両の外装部品1は、ベース部材10と、このベース部材10に固定され、電波透過性に優れる意匠膜が表面に形成された意匠部材20と、これらのベース部材10及び意匠部材20を被覆する透明樹脂材で成る表層部材30とを含んでいる。ベース部材10は黒色系又は濃色系の樹脂材で成り、意匠膜は光沢を有する金属膜で構成されている。金属膜の金属は、インジウム、クロム、錫、アルミニウム及び金のいずれかである。
(もっと読む)
レーダ
【課題】高い検知確率と低い誤検知確率を併せ持ち、距離に応じた検出精度と応答性が確保できるようにしたレーダを構成する。
【解決手段】複数の計測タイミングで取得された探知情報のうち同一反射体に起因して生じたものと予測した探知情報を基にして反射体に相当する物標の追尾を行うとともに、追尾中の物標が同一反射体に起因して生じたものと見なされる度合いを表す追尾信頼度(計測タイミングの回数MとそのM回の計測タイミングで取得された探知情報のうち同一反射体に起因して生じたものと見なされる回数N)の条件を複数組設定し、いずれか1つが満足されるとき、その反射体を真物標として検知する。
(もっと読む)
車両の障害物検知装置
【課題】障害物を検知するレーダーユニット1を備えた車両の障害物検知装置において、レーダーユニット1を交換した際に、その交換後のレーダーユニット1の障害物検知軸の向きの調整が確実に行われるようにする。
【解決手段】レーダーユニット1の障害物検知軸の向きの調整が正常に完了する毎に、レーダーユニット1の記憶部1aに予め記憶したレーダIDコードと同じレーダIDコードをコントロールユニット61の記憶部61aに記憶させるとともに、イグニッションスイッチ64のオン時に、上記記憶部1aに記憶されているレーダIDコードと、上記記憶部61aに記憶されている最新のレーダIDコードとが一致しているか否かを判定して、両レーダIDコードが一致していないと判定したときに、表示装置63により警報を行う。
(もっと読む)
自動車レーダセンサアセンブリ
【課題】レーダ送信回路、およびレーダ受信回路を互いに近接させ、かつ、物理的にも電気的にも互いに干渉しないように、マウントするためのフレームを提供する。
【解決手段】レーダ電子回路モジュールは、送信回路基板および受信回路基板が配置された複数の凹部を有する第1の面を有する支持構造物を含んでいる。送信回路基板および受信回路基板は、送信回路および受信回路が支持構造物上のキャビティ内に配置されるように、支持構造物の第1の面の上に配置される。レーダ電子回路モジュールは、支持構造物の第2の面に配置されたデジタル/電源回路プリント配線基板(PWB)と、支持構造物上に配置されたコネクタとを含んでいる。このコネクタは、デジタル/電源回路PWB、送信回路基板、および受信回路基板のうちの少なくとも2つの間に、電力信号、アナログ信号、またはデジタル信号のうちの少なくとも1つによる電気的接続を行うようになっている。
(もっと読む)
レーダ装置
【課題】受信特性を劣化させることなく所望の検知精度を有するレーダ装置を小型で且つ安価に実現する。
【解決手段】送信アンテナ1は周波数を三角波変調した送信信号を送信する。受信アンテナ2A〜2Nは所定方向に配列されており、反射波を受信する。各受信アンテナ2A〜2Nは、マルチプレクサ30の各帯域通過フィルタ部3A〜3Nにそれぞれ受信信号を出力する。各帯域通過フィルタ部3A〜3Nは、送信信号の周波数変調帯域の略全周波数帯域をアンテナ数で分割して順次割り当てられた互いに異なる周波数帯域がそれぞれの通過帯域として設定されている。この構成により、マルチプレクサ30から出力される合成出力信号は、帯域通過フィルタ部3A〜3Nから順次出力された受信信号が時系列に並ぶ信号となる。これにより、スイッチ回路を用いずとも、各受信アンテナ2A〜2Nの受信信号を時系列で選択して出力することと同じになる。
(もっと読む)
校正装置、物標検知装置および校正方法
【課題】レーダから得られた物標の座標と、カメラから得られた物標の座標とを用いて、物標同士を容易にマッチングさせることの可能な校正装置を提供する。
【解決手段】制御部は、レーダ情報から各物標のレーダ座標系の3次元座標を取得する。制御部は、右カメラの2次元画像から各物標の2次元座標を、左カメラの2次元画像から各物標の2次元座標を抽出し、各物標の右カメラ座標系および左カメラ座標系の2次元座標から視差情報を取得し、視差情報を用いて各物標の右カメラ座標系および左カメラ座標系の2次元座標を、右カメラ座標系および左カメラ座標系の3次元座標に変換する。制御部は、レーダ情報から得られた各物標のレーダ座標系の3次元座標と、ステレオ画像から得られた各物標の右カメラ座標系および左カメラ座標系の3次元座標とを用いて、レーダ座標系の3次元座標を右カメラ座標系および左カメラ座標系の3次元座標に変換する。
(もっと読む)
車載レーダ装置
【課題】車両側レドーム表面に付着する汚れを車両側レドームとレーダとの位置関係によらず確実に検出できる確実に検出できる車載レーダ装置を提供する。
【解決手段】車両に取り付けられた車両側レドーム100内に送信手段、受信手段を含む電波式レーダ200を収容すると共に、車両側レドームを通してレーダからの電波を送受信し、対象物までの距離、相対速度を計測する車載レーダ装置において、車両側レドーム100とレーダ200との間に配置され、車両側レドーム表面の付着物からの反射波をレーダの受信手段に導く反射板300等の誘導手段と、この誘導手段によって受信された反射波の信号レベルに基づいて、車両側レドーム表面の付着物の有無を判定する付着物判定手段とを備えた。
(もっと読む)
距離測定装置
【課題】アクチュエータの負荷を重くせずに検知エリアを拡大することのできる距離測定装置を提供する。
【解決手段】距離測定装置は、投光レンズ1の後方の焦点位置に探査波の走査方向に沿って配置したLD1〜LD3を備えている。投光レンズ1は左右に移動可能であって、LD1、LD2、LD3は、それぞれ、検知エリア1、検知エリア2、検知エリア3に対して探査波を送信する。LD1、LD2、LD3は、検知エリア1と検知エリア2の一部が重なり、検知エリア3と検知エリア2の一部が重なるように配置される。投光レンズ1は、LD1の探査波が検知エリア1にのみ送波され、LD2の探査波が検知エリア3にのみ送波され、LD4の探査波が検知エリア4にのみ送波される長さだけ左右に移動する。
(もっと読む)
距離計測装置、距離計測方法および距離計測プログラム
【課題】検出範囲内の全ての検出点における距離情報を取得すること。
【解決手段】本発明にかかる距離計測装置1は、検出範囲内に位置する物体までの距離を検出するレーダ60と、所定の撮像視野に対応する画像信号群を生成する撮像部10と、撮像部10から出力された画像信号群をもとに撮像視野内の距離を演算する距離演算部20と、レーダ60からの検出結果から非検出点を検出し、この非検出点に対応する領域の距離演算を距離演算部20に対して指示するとともに、距離演算部20における演算値を非検出点に補充した検出結果を距離データ53として出力する補完部31とを備える。
(もっと読む)
物体検出装置及び物体検出方法
【課題】FM−CWレーダ方式の物体検出装置において、静止物体を検出する。
【解決手段】送信手段1と、受信手段2と、移動体の速度を検出する速度検出手段10と、速度情報に基づく周波数のオフセット量を算出する周波数オフセット量算出手段5と、送信信号の周波数上昇部分における受信IF信号の周波数スペクトルに周波数オフセット量を加えて上昇オフセット周波数スペクトルを求めるとともに、送信信号の周波数下降部分における受信IF信号の周波数スペクトルから周波数オフセット量を差し引いて下降オフセット周波数スペクトルを求める周波数オフセット手段5と、上昇オフセット周波数スペクトルと下降オフセット周波数スペクトルとを加算して加算周波数スペクトルを求める加算手段6と、加算周波数スペクトルに基づいて静止物体の検出を行う静止物体検出手段7とを備える。
(もっと読む)
車載レーダ装置
【課題】送信信号の電力を増大させることなく、降雨等の悪天候時においても良好に目標物を検出することができる車載レーダ装置を提供する。
【解決手段】自動車に搭載される車載レーダ装置1であって、電磁波を送信波として自動車の周辺の目標物に送信するとともに、目標物からの反射波を受信波として受信するアンテナ4と、送信波および受信波から得られるビート信号に基づいて目標物との距離および相対速度の少なくとも一方を演算する演算回路8と、自動車の付近の降雨状態を判定する降雨状態判定部13と、降雨状態に基づいてビート信号に対する検出感度を設定する増幅利得設定部15およびしきい値設定部16とを備えたものである。
(もっと読む)
車載用レーダ装置
【課題】車両走行状態と位置センサの出力とから得られる軸ズレを補償してアンテナの方向を制御することで、検知精度を向上させた車載用レーダ装置を提供する。
【解決手段】電磁波を送信するとともに、反射波を受信するアンテナ2と、送受信波から物体を検知する物体検知手段(ECU7)と、車両の走行状態を取得する走行状態取得手段(ECU7)と、走行状態から電磁波の照射方向を設定する照射方向設定手段(ECU7)と、照射方向からアンテナ2の方向を変更するアンテナ駆動用アクチュエータ4と、アンテナ2の位置を検知する位置センサ3と、走行状態とアンテナ2の位置とからアンテナ2の方向と電磁波の照射方向との軸ズレを求める軸ズレ算出手段(ECU7)と、アンテナ2の基準位置を記憶するとともに、軸ズレを記憶する記憶手段(ECU7)とを備え、照射方向変更手段は、軸ズレを補償してアンテナ2の方向を変更するものである。
(もっと読む)
レーダ装置
【課題】人の手を煩わすことなく低コストで自動的に電波の回り込みを最小にすることができ、さらに、例えば経年変化によりバンパーの厚みが変わってしまった場合や、材料の異なるバンパーに交換した場合でも、電波の回り込みを最小にすることができるレーダ装置を提供することを目的とする。
【解決手段】アンテナの前方に配置された部材を通してレーダビームを送受信することで、周囲の物体を検知するレーダ装置であって、基準周波数で変調された送信ビームをアンテナから送信する送信部と、送信ビームが物体で反射した受信ビームを受信する受信部と、送信ビームと受信ビームの時間差に基づいて物体までの距離を算出する信号処理部とを備え、信号処理部は、さらに、受信ビームに基づいて部材からの反射損が最小になるように基準周波数を制御することを特徴とする。
(もっと読む)
検出装置
【課題】 レーザ光を目標位置に照射して目標位置の状況を検出する検出装置において、対向車からのレーザ光を受光したような場合など、他の検出装置からのレーザ光を受光したような場合にも、これにより誤検出が生じないような検出装置を提供する。
【解決手段】 数種の変調パターンのうち目標位置毎に個別に設定した変調パターンにてパルスレーザ光を変調してレーザ出射部401から目標位置に出力する。DSP10は、レーザ出射部401から出力したパルスレーザ光の変調パターンとレーザ受光部402によって受光したパルスレーザ光の変調パターンがマッチングしたときのみ目標位置に障害物が存在するとして検出し、障害物との距離を測定する。これにより、誤って対向車等からパルスレーザ光を受光しても、これをもとに目標位置の状況を誤検出する惧れが抑制される。誤検出の可能性は、変調パターンの種類を増やす程、抑制される。
(もっと読む)
1 - 20 / 33
[ Back to top ]