
Fターム[5J070BF05]の内容
レーダ方式及びその細部 (42,132) | 衝突防止 (1,451) | 危険度判定 (267) | 高度 (8)
Fターム[5J070BF05]に分類される特許
1 - 8 / 8
レーダ装置
【課題】鉛直方向の方位測定精度が向上されたレーダ装置の実現。
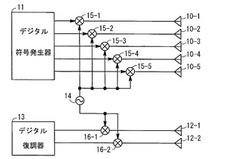
【解決手段】レーダ装置は、送信アンテナ10−1〜10−5と、デジタル符号発生器11と、受信アンテナ12−1、12−2と、デジタル復調器13を有している。送信アンテナ10−1、10−3、10−5は、放射方向が斜め鉛直上方となるように設計され、送信アンテナ10−2、10−4は、放射方向が斜め鉛直下方となるように設計され、送信アンテナ10−1〜10−5全体では、放射方向が水平方向となるように設計されている。デジタル符号発生器11は、擬似雑音符号Aで変調された信号と擬似雑音符号Bで変調された信号とを合わせた信号が送信アンテナ10−1、10−3、10−5へと出力され、擬似雑音符号Bで変調された信号と擬似雑音符号Cで変調された信号とを合わせた信号が送信アンテナ10−2、10−4へと出力されるよう構成されている。
(もっと読む)
車両用制御対象物判定装置

【課題】上方物は下方物といった非制御対象物に対し車体制御に必要か否かを判定することが可能な車両用制御対象物判定装置を提供する。
【解決手段】上下方向に異なる高さに設定された複数のレイヤに基づいて車両前方の物体を検出する物体検出手段と、物体検出手段により各レイヤにて得られた複数の検出点データを結合し、一つの物体として認識するグルーピング手段と、を備えた車両用制御対象物判定装置において、グルーピング手段は、複数のレイヤの各々の検出点データの個数の差が所定以上である場合は、検出点データの個数の差が所定以上である各レイヤにて検出された検出点データをグルーピングすることなく、それぞれ別の物体であると認識する。
(もっと読む)
レーダ装置
【課題】ターゲットから反射波を受信した際に、当該ターゲットが上方構造物であるか車両であるかを判別できるようにする。
【解決手段】演算処理器26は、反射波の強度の2階微分値を算出し、当該2階微分値に基づいてターゲット32が上方構造物であるか車両であるかを判別する。または、反射波の強度波形を周波数成分に分離し、特定の周波数成分の強度に基づいてターゲット32が上方構造物であるか車両であるかを判別する。
(もっと読む)
レーダ装置
【課題】従来はレーダ装置が車両の進行方向のターゲットの高さを算出するために所定の演算処理時間がかかっていた。この演算処理時間による遅れ時間を解消し、より迅速な警報指令の送信を可能にする。
【解決手段】演算処理器26は、予め定めた検出範囲においてターゲット32の反射波42の強度の極小点を検知したときに警報器に対して警報指令を送る。検出範囲における強度の極小点の有無に基づいて警報指令の要否を判定することにより、従来よりも迅速に警報指令の要否判定を行うことが可能となる。
(もっと読む)
物標情報推定装置
【課題】レーダ波を用いて検出される物標に関する情報(少なくとも路面からの高さ)を少ない処理負荷で検出する。
【解決手段】判定の対象となる選択物標との距離が100mより大きく(S410:YES)、且つ、中位物標のヌル距離ではない(S420:YES)場合、選択物標の受信電力がヌルポイント(外挿フラグGF=1又は前サイクルの受信電力との電力差ΔPが10dB以上)になっていれば(S430:YES or S460:YES)、その選択物標を高位物標と判定する(S440)。選択物標との距離が100m以下(S410:NO) の場合は、選択物標の受信電力がヌルポイントになっていれば(S470:YES or S500:YES)、その選択物標を中位物標と判定し(S480)、ヌルポイントになっていなければ、その選択物標を低位物標と判定する(S510)。
(もっと読む)
路面監視装置,サスペンション制御装置
【課題】車両の姿勢に関わらず路面状況を正確に検出可能な監視装置、及びその監視結果を利用するサスペンション制御装置を提供する。
【解決手段】レーザー光で路面をスキャンした測定結果から、レーザー光を反射した地点をセンサ座標で表した検出位置情報(XL,YL,ZL)を生成し、各種センサの検出結果から車両の移動距離D,路面傾斜角θx,θyを算出する(S110〜S140)。これら算出結果から、車両の移動距離,移動方向を表す移動ベクトル(ΔX,ΔY,ΔZ)を求めると共に、検出位置情報を、車両基準座標の原点からの相対的な位置関係を示す相対位置ベクトル(XP,YP,ZP)に変換し、これら移動ベクトル及び相対位置ベクトルを、前回の監視タイミングにおける車両基準座標系の原点を絶対座標系で表した位置(Xr,Yr,Zr)に加算することで、レーザー光の反射地点の位置を絶対座標系で示した反射地点情報(X,Y,Z)を算出する(S150〜S170)。
(もっと読む)
仰角測定能力を持つレーダシステム
自動車の周辺検出用レーダシステムであって、1つ又は複数の送信アンテナにより送信信号を放射する送信手段、物体において反射される送信信号を1つ又は複数の受信アンテナにより受信する受信手段、及び受信した信号を処理する信号処理手段を有するものにおいて、送信アンテナ及び受信アンテナの異なる組合わせから受信信号が取得され、各組合わせに、基準点からそれぞれの送信アンテナ及びそれぞれの受信アンテナの位相中心への両方のベクトルの和として定義される相対位相中心が対応せしめられ、その際使用される送信アンテナ及び受信アンテナが、それぞれ少なくとも近似的に同じ放射特性を持ち、これらの送信アンテナの放射特性がこれらの受信アンテナの放射特性に対して異なっていてもよく、空間方向Rに対して直角な空間方向Sに関して、相対位相中心の位置に関して空間方向Rに規定されている送信アンテナと受信アンテナのこれらの組合わせの列が考察される時、送信アンテナと受信アンテナのこれらの組合わせの相対位相中心の位置が、周期長Pで周期的に変化し、物体の受信信号が、空間方向Sにおけるその角度位置に従って、このように規定される送信アンテナと受信アンテナのこのように規定される組合わせにわたって周期長Pで交番する位相成分を持ち、それによりこの空間方向Sに対して物体の位置を表すことが可能であることが、信号処理手段において利用されることを特徴とする。 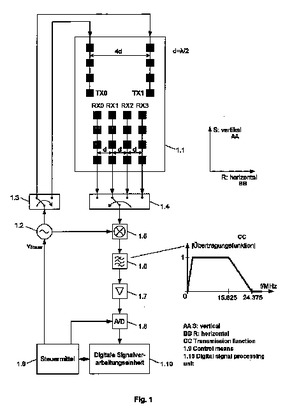 (もっと読む)
(もっと読む)
車両用障害物検出装置
【課題】障害物と非障害物の判別を容易に行うことが可能な車両用障害物検出装置を提供することを目的とする。
【解決手段】自車両から異なる領域へ向けて検出用波動を照射し、検出用波動に対して応答する反射波をとらえることにより自車両周辺の波動反射点位置情報を検出する検出装置を備え、前記検出装置により検出された波動反射点位置情報に基づき自車両周辺の物体が識別された際に、識別された該物体が障害物であるか否かを判定する障害物判定手段を有する車両用障害物検出装置であって、前記検出装置は、自車両から所定角度で俯角方向に前記検出用波動を照射し、前記障害物判定手段は、前記波動反射点位置情報を基に求められる自車両から前記物体までの距離と前記所定角度の角度値とから算出される前記物体の高さに応じて、当該物体が障害物であるか否かを判定することを特徴とする。
(もっと読む)
1 - 8 / 8
[ Back to top ]