
Fターム[5J070BF09]の内容
レーダ方式及びその細部 (42,132) | 衝突防止 (1,451) | 監視方向又は範囲 (317) | 側面又は周囲 (70)
Fターム[5J070BF09]に分類される特許
1 - 20 / 70
後側方障害物検知装置
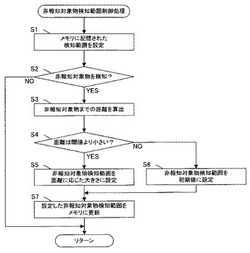
【課題】自車両がガードレール等の非報知対象物と近い位置にある場合であっても、報知対象物である他車両等が非報知対象物として検知されることを防止することが可能な後側方障害物検知装置を提供する。
【解決手段】自車両の後側方領域内の対象物の存在を検知する後側方障害物検知装置であって、対象物を非報知対象物として検知する検知角度の範囲である非報知対象物検知範囲の大きさを制御する非報知対象物検知範囲制御部と、自車両から非報知対象物までの距離を算出する距離算出部とを備え、非報知対象物検知範囲制御部は、距離算出部によって算出された自車両から非報知対象物までの距離に応じて、非報知対象物検知範囲の大きさを制御する。
(もっと読む)
後側方障害物検知装置

【課題】自車両が低速で走行する場合であっても、非報知対象物であるガードレール等の静止物が、報知対象物である他車両等の移動物として検知されることを防止することが可能な後側方障害物検知装置を提供する。
【解決手段】自車両の後側方領域内の対象物の存在を検知する後側方障害物検知装置であって、対象物を非報知対象物と報知対象物に分類する対象物分類部と、自車両の走行速度に応じて、対象物を非報知対象物に分類する条件を制御する非報知対象物分類条件制御部とを備える。
(もっと読む)
レーダ装置
【課題】 物標との距離以外の情報が得られない検出エリアを含む複数の検出エリアにて物標検出を行うレーダ装置において、距離以外の情報が得られない検出エリアでも、移動物標であるか否かを速やかに判断できるようにする。
【解決手段】側方検出エリアで追跡中の物標が存在せず(S110:NO)、側方探査モードでの測定結果に基づき物標(側方検出物標)が検出された場合(S120:YES)、同時に、後方探査モードでの測定結果に基づき重複エリアで移動物標(重複エリア移動物標)が検出されていれば(S130:YES,S140:NO)、側方検出物標を側方検出エリアにて追跡の必要がある追跡対象物標として登録すると共に、その登録した追跡対象物標に、重複エリア移動物標の情報を引き継ぐ(S150)。
(もっと読む)
アンテナ装置、レーダ装置、車載レーダシステム
【課題】単一の基板に形成されているにも拘わらず、180°を越えるような広い検知エリアをカバーできるアンテナ装置、そのアンテナ装置を利用したレーダ装置、車載レーダシステムを提供する。
【解決手段】アンテナ基板6の面方向を主放射方向とする平面放射用アンテナ部3と、アンテナ基板6の端方向を主照射方向とする水平放射用アンテナ部4とを、アンテナ基板6の異なるパターン形成層に形成する。これにより、両アンテナ部3,4を同一のパターン形成層に形成する場合と比較して、水平放射用アンテナ部4の指向性をより部品載置面6b側にシフトさせることができる。その結果、単一のアンテナ基板6でカバー可能な検知エリアを広角化(例えば、180°以上)することができる。
(もっと読む)
障害物認識装置及び障害物認識方法
【課題】高い精度で障害物を認識することができる障害物認識装置を提供する。
【解決手段】本発明の一実施形態に係る障害物認識装置1は、電磁波を発信し、その反射波の反射出力に基づいて障害物を検出する第1の障害物検出手段11と、第1の障害物検出手段とは異なる方法で障害物を検出する第2の障害物検出手段12と、第2の障害物検出手段により検出された複数の障害物についてそれらの障害物の推定反射出力を合成した合成推定反射出力を算出する反射出力推定手段22と、合成推定反射出力と第1の障害物検出手段により計測された計測反射出力との比較結果を用いて障害物を認識する障害物統合認識手段24と、を備える。
(もっと読む)
衝突予測装置
【課題】自車の前方に検出されたターゲットの自車に対する相対位置に応じて、当該ターゲットが自車の左側を通過するか、または右側を通過するかを予測し、自車とターゲットとの衝突可能性を適切に推定する衝突予測装置を提供する。
【解決手段】本発明の衝突予測装置は、自車の前方にターゲットを検出するターゲット検出手段と、ターゲットの自車に対する相対位置を算出する相対位置算出手段と、当該相対位置に基づいて、ターゲットが、自車の左側を通過するか、または右側を通過するかを示す通過予測情報を設定する通過予測情報設定手段と、相対位置の変化を監視する相対位置監視手段と、相対位置の変化に基づいて、通過予測情報設定手段によって設定された通過予測情報を変更する通過予測情報変更手段と、通過予測情報に基づいて、自車とターゲットとの衝突可能性を推定する衝突可能性推定手段とを備える。
(もっと読む)
自動車用レーダ・システムおよび方法
【課題】 アンテナ・ビームの各々における距離ゲートを変化させることによって、検出ゾーンのカバレッジを可変とする。
【解決手段】 レーダ検出プロセスは、FFT出力信号の導関数を計算し、指定検出ゾーン内において物体を検出することを含む。一実施形態では、FFT出力信号の二次導関数におけるゼロ交差が物体の存在を示す。物体の距離は、ゼロ交差が発生した周波数の関数として判定する。また、各レーダ・ビームおよび処理サイクルにおいて物体の有無を示す指標を収容した検出表についても記載する。このような指標を少なくとも2つ組み合わせて、検出ゾーンにおける物体の有無を検出する。
(もっと読む)
道路端検出装置
【課題】自車両が走行する道路の道路端を検出する道路端検出装置において、道路端を検出する際の精度を向上できるようにする。
【解決手段】認識システムでは、道路端位置認識処理にて、自車両の進行方向における道路端の候補となる複数の検出点、および自車両の挙動の検出結果を取得する(S110)。そして、自車両が各検出点の真横まで移動したと仮定したときにおける自車両の位置に対する各検出点の位置を表す通過位置を、自車両の挙動に基づいて検出点毎に演算し、演算された各通過位置を、自車両と各検出点との距離に応じて予め設定された単位距離毎に複数のグループに振り分けたヒストグラムを生成する(S120)。このヒストグラムにおいて最も多くの通過位置が振り分けられたグループの代表値を自車両に対する道路端の位置として設定する(S130)。
(もっと読む)
前方車両感知システム
【課題】
連続した静止物によって先行車両の感知効率が落ちることを防止するための前方車両感知システムを提供する。
【解決手段】
車両の前方道路を監視するセンサー部、及び道路周辺にある連続した静止物を感知して仮想ラインを算出し、前方道路で感知された先行車両横位置の絶対値が仮想ライン横位置の絶対値より大きいと判断されれば、以前に感知された先行車両横位置を現在先行車両横位置として認識する制御部を含むことを特徴とする。
(もっと読む)
車載レーダ点検装置とその方法
【課題】ガソリンスタンドや立体駐車場などにおいて運転者が簡易に車載レーダの送信あるいは受信方向のずれ及び動作を点検できる車載レーダ点検装置とその方法を提供する。
【解決手段】本発明は、車両1を回転する車両回転台8によって、リトロリフレクタ2と車載レーダ12,13との相対的な方向を変化させ、それぞれ車両の前面、後方、左右斜め前方、左右斜め後方及び左右側方のうちの複数カ所に取り付けられた車載レーダの動作点検をする車載レーダ点検装置とその方法である。
(もっと読む)
物体検出装置、物体検出装置を備えた車両の安全システム
【課題】上下方向の分解能が所定レベルに満たないレーダによって検出された静止物体が車両の走行にとっての障害物であるか否かを精度良く判定可能な物体検出装置を提供する。
【解決手段】レーダ部10と、レーダ部10により自車両の前方に存在する絶対速度が所定値未満の物体を静止物体として検出する静止物体検出部20と、自車両の前方に存在する絶対速度が所定値以上の物体を移動物体として検出する移動物体検出部30と、静止物体の検出位置の周囲に、その範囲に存在する移動物体は該静止物体に衝突することを回避不可能又は該静止物体に既に衝突したと推定できるように定められる所定の探索範囲を設定する設定部40と、移動物体の検出結果のうちに検出位置が前記探索範囲に入る検出結果が存在する場合、前記検出された静止物体は自車両の走行にとって障害とならない非障害物であると判定する判定部50と、を備える。
(もっと読む)
物体検出装置
【課題】他車両が自車両に対して接近しているのか離反しているのかを精度良く検出する。
【解決手段】レーダで自車両の後側方物体を検出する物体検出装置において、前記後側方物体を継続して検出している期間中の所定の時期に検出した自車両と後側方物体との相対距離及び相対速度に基づいて前記後側方物体が自車両から離反する物体であるか否か判定する。実際に接近してくる物体と、実際には離反しているが接近してくると誤認している物体とでは、過去の所定の時期に検出した自車両と後側方物体との相対距離及び相対速度が異なることを利用する。
(もっと読む)
物体検出装置及び運転支援装置
【課題】警報対象とはならない物体に対して警報が行なわれることを抑制する。
【解決手段】レーダで自車両の後側方の車両を検出する物体検出装置において、自車両の進行方向に複数の車線を有する道路を走行するときに、自車両が走行している車線を取得する取得手段と、レーダにより検出される物標を車両として認識するときの条件を、取得手段により取得される車線に基づいて変更する認識条件変更手段と、を備える。
(もっと読む)
レーダ装置
【課題】物体の左右方向及び上下方向の少なくとも一方の位置を正確に検出することの可能なレーダ装置の提供。
【解決手段】レーダ装置100は、左右方向に配列され、少なくとも一部が上下方向にずれて配設された複数(ここでは、3個)の素子アンテナ(21、22、23)を有する受信アンテナ2と、位置検出ECU(5)と、を備える。また、位置検出ECU(5)は、前記複数の素子アンテナ(21、22、23)で受信された受信信号の位相差に基づいて、物体TGの上下方向位置P1を検出する第1位置検出部53と、上下方向位置P1の履歴に基づいて、該上下方向位置P1を補正して、補正後の上下方向位置である第1補正位置P1Aを求める第1位置補正部(54)と、を備える。
【選択図】図2 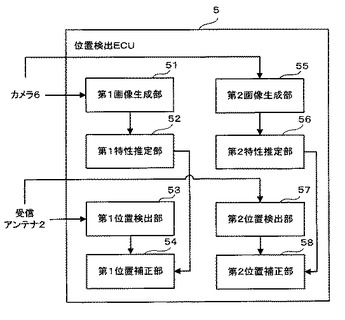 (もっと読む)
(もっと読む)
検出装置
【課題】レーダによる物体検知範囲を広角範囲、または狭角範囲を切り替えて使用できるようにする。
【解決手段】アンテナ37−1は、電波を照射して送信信号を送信し、第1の間隔で1列ずつのアンテナが配置されたアンテナ51−2,51−3の対は、送信信号のうち、反射されてくる電波を受信し、第1の間隔よりも広い第2の間隔で、アンテナ51−1,51−2を1本のアンテナとし、アンテナ51−3,51−4を1本のアンテナとしたときのそれらの対は、送信信号のうち、反射されてくる電波を受信し、受信部12は、アンテナ51−2,51−3の対、または、アンテナ51−1,51−2とアンテナ51−3,51−4とをそれぞれ1本のアンテナとした対により受信された電波より受信信号を生成し、衝突予備動作用信号処理部13は、受信信号をサンプリングすることにより、物体を検出する。本発明は、車両安全装置に適用することができる。
(もっと読む)
物体検出装置
【課題】路側物近傍を走行する車両の位置を正確に検出する。
【解決手段】物体検出装置1は、車両に搭載され、レーダセンサからなる第1センサ24とは相違するセンサである第2センサ21〜23を介して、該車両の周囲に存在する物体を検出する路側物検出部11と、路側物検出部11によって路側物が検出されているか否かを判定する判定部12と、判定部12によって路側物が検出されていると判定された場合に、第2センサ21〜23を介して、前記路側物の位置情報を取得する位置取得部13と、位置取得部13によって取得された前記路側物の位置情報に基づいて、第1センサ24を介して、前記路側物の近傍を走行する他の車両を検出する車両検出部14と、を備える。
(もっと読む)
レーダ装置
【課題】受信アンテナの個数を多くすることなく、多くの物体の方位を高精度に検出する。
【解決手段】レーダ装置1の制御部11は、複数個の送信信号を生成し、各送信信号を、それぞれ、送信部12を介して互いに相違する領域に向けて送出する送信指示部111と、受信部13を介して、前記複数個の送信信号にそれぞれ対応する受信信号を受信し、受信された受信信号毎に、MUSIC法等を用いて、物体の存在する方位(=前記受信信号の到来する方位)を高分解能で検出する受信信号処理部114と、を備える。
(もっと読む)
物体検出装置
【課題】反射強度が低い物標を精度良く移動物体として検出することが可能な物体検出装置を提供する。
【課題手段】物体検出装置1では、ミリ波レーダ2により、左側方及び右側方に電磁波が照射され、その反射強度の分布から複数の物標が検出され、レーダ用ECU1により、自車両が走行するレーンに左側及び右側のそれぞれに隣接するレーンの有無が判定され、隣接レーンの有無に応じた抽出条件により、左側及び右側のそれぞれにおいて検出された物標から移動物体を抽出する。隣接レーンの有無により移動物体の抽出条件が変更されるので、反射強度が比較的低い二輪車や反射強度が高い四輪車を精度良く抽出することが可能となる。
(もっと読む)
ミラーおよび周辺監視装置
【課題】可視光を反射するといったミラー本来の機能を維持しつつ、レーダ装置が照射する電磁波の透過に影響を与えることのないミラーおよび周辺監視装置を提供する。
【解決手段】レーダ装置のアンテナの前方に設置されるミラーであり、透明基板の表面に形成されたインジウムまたはスズの蒸着膜を光反射面とし、上記光反射面は、レーダ装置が電磁波を照射する方向に向けられていることを特徴とする。また、移動体に搭載され、当該移動体の外部に向けた検出範囲内の物体を検出するレーダ装置と、透明基板の表面に形成されたインジウムまたはスズの蒸着膜を光反射面とするミラーとを備え、上記光反射面は、レーダ装置が電磁波を照射する方向に向けられていることを特徴とする周辺監視装置。
(もっと読む)
衝突直前状態を検出する確認センサを含むセンサシステム
本発明に関する少なくとも1つの実施形態において、自動車の衝突直前状態を検出するセンサシステムが提供される。センサシステムは、差し迫った衝突の激しさおよびその衝突までの残り時間の所見を提供する主レーダ装置を含む。確認センサを含む別個の確認検出装置は、確認出力を供給するために自動車に隣接する近場のスペース内を検出する。この主レーダ装置および確認検出装置と通信するのは、電子制御装置である。この装置は、主レーダ出力および確認検出出力の評価に依存して、安全装置に対する展開信号を発生するように構成される。 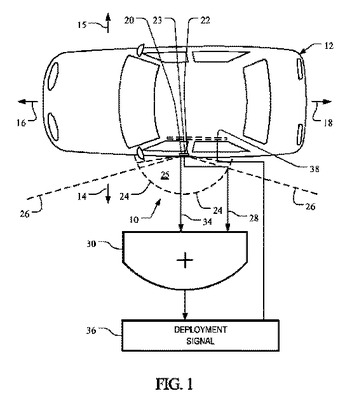 (もっと読む)
(もっと読む)
1 - 20 / 70
[ Back to top ]