
Fターム[5J070BF10]の内容
レーダ方式及びその細部 (42,132) | 衝突防止 (1,451) | 監視方向又は範囲 (317) | 方向又は範囲を定めるもの (67)
Fターム[5J070BF10]に分類される特許
1 - 20 / 67
自律移動システム、その制御方法及びプログラム
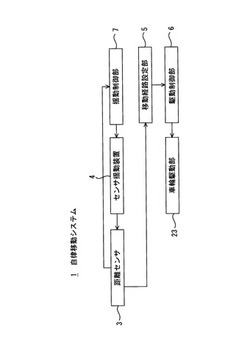
【課題】距離検出手段の揺動範囲を適切に設定し、最適に障害物を検知できる自律移動システム、その制御方法及びプログラムを提供すること。
【解決手段】自律移動システムは、移動体に設けられ、検出領域内の障害物の距離を検出する距離検出手段と、距離検出手段の検出領域をヨー方向へ揺動させる揺動手段と、揺動手段の揺動を制御する揺動制御手段と、を備えている。また、揺動制御手段は、障害物の位置に応じて、揺動手段を制御して距離検出手段の検出領域の揺動範囲を制限している。
(もっと読む)
車両用制御対象物判定装置

【課題】上方物は下方物といった非制御対象物に対し車体制御に必要か否かを判定することが可能な車両用制御対象物判定装置を提供する。
【解決手段】上下方向に異なる高さに設定された複数のレイヤに基づいて車両前方の物体を検出する物体検出手段と、物体検出手段により各レイヤにて得られた複数の検出点データを結合し、一つの物体として認識するグルーピング手段と、を備えた車両用制御対象物判定装置において、グルーピング手段は、複数のレイヤの各々の検出点データの個数の差が所定以上である場合は、検出点データの個数の差が所定以上である各レイヤにて検出された検出点データをグルーピングすることなく、それぞれ別の物体であると認識する。
(もっと読む)
電波発射源検出センサ及び自動料金収受システム
【課題】所定のレーンに設置された路側器と、その隣接レーンに存在する車載器との間で確立された誤通信を中断し、車載器に対する誤課金を防止することが可能な電波発射源検出センサと、このセンサを用いた自動料金収受システムとを提供する。
【解決手段】第1及び第2のレーンに設置され、移動体に所持された応答器と通信を行う第1及び第2の路側器と接続する電波発射源検出センサは、アンテナ部、検波部、方向特定部、誤通信判定部を具備する。アンテナ部は、第1及び第2のレーンを含む受信ビームにより、応答器からの応答信号を受信する。検波部は、応答信号から必要信号を検波する。方向特定部は、検波結果に基づいて、電波強度、到来方向及び応答周波数を取得する。誤通信判定部は、電波強度、到来方向及び応答周波数に基づき、応答器との通信は誤りであるとの旨の誤通信通知を第1及び第2の路側器へ出力する。
(もっと読む)
アンテナ装置、レーダ装置、車載レーダシステム
【課題】単一の基板に形成されているにも拘わらず、180°を越えるような広い検知エリアをカバーできるアンテナ装置、そのアンテナ装置を利用したレーダ装置、車載レーダシステムを提供する。
【解決手段】アンテナ基板6の面方向を主放射方向とする平面放射用アンテナ部3と、アンテナ基板6の端方向を主照射方向とする水平放射用アンテナ部4とを、アンテナ基板6の異なるパターン形成層に形成する。これにより、両アンテナ部3,4を同一のパターン形成層に形成する場合と比較して、水平放射用アンテナ部4の指向性をより部品載置面6b側にシフトさせることができる。その結果、単一のアンテナ基板6でカバー可能な検知エリアを広角化(例えば、180°以上)することができる。
(もっと読む)
障害物認識装置
【課題】車両の進行方向の速度変化と共に車両の進行方向と垂直な左右方向の速度変化も判断することで、障害物検出率の向上を図った障害物認識装置を提供する。
【解決手段】レーダを介して検出した物標について、物標の情報と車両の走行情報とに基づき、車両の進行方向に関する絶対速度及び車両の左右方向に関する絶対速度の両方を判断する。両方の絶対速度が所定の基準値以下であると判断された場合、すなわち物標が路面を移動していないと判断された場合に限り、レーダ検出によって得られる情報とカメラ等によって撮像される画像情報とをフュージョンした情報を用いて物標の立体物判断を行う。いずれかの絶対速度が所定の基準値を超える場合には、レーダ検出によって得られる情報のみによって物標の立体物判断を行う。
(もっと読む)
目標追尾装置および目標追尾方法
【課題】目標追尾情報のうちから一部を選定して出力する目標追尾装置について、新たに選定された目標追尾情報が出力された当初から信頼性が高い状態であって、さらには真に必要とされる目標追尾情報のみを選定して出力する目標追尾装置および目標追尾方法を提供する。
【解決手段】目標探知範囲に存在する全目標を捕捉する全目標捕捉部と、前記全目標捕捉部によって捕捉された全目標の追尾を常に行ってそれぞれの目標追尾情報を第1の目標追尾情報として出力する全目標追尾部と、前記全目標の中から指定された条件に合致する目標の目標追尾情報のみ前記全目標追尾部の出力から選定して出力するための前記条件が入力される条件入力部と、前記第1の目標追尾情報が入力され、前記条件入力部への入力によって選定された目標についてのみ第2の目標追尾情報として出力する出力情報選定部と、を備える。
(もっと読む)
物体検出装置
【課題】従来に比して物体を正確に検出可能とする物体検出装置を提供する。
【解決手段】自車両周辺の物体を検出する物体検出装置であって、自車両に搭載され、検知領域内に存在する物体を検出する物体検出手段と、少なくとも自車両が走行する道路の周辺に存在する障害物の位置情報を外部から取得する周辺情報取得手段と、物体検出手段の検知領域を周辺情報取得手段によって取得した障害物の位置情報に応じて変更する検知領域変更手段とを備える物体検出装置である。
(もっと読む)
物体検知装置
【課題】物体を迅速かつ精度良く検知する。
【解決手段】物体検知装置10は、車両(自車両P)の左前部および右前部に配置されて車両(自車両P)の前方領域全体を1回で走査可能な広角の右レーダ11Rおよび左レーダ11Lと、処理装置12とを備える。右レーダ11Rは、車両(自車両P)から前後方向前方に所定距離だけ離れた位置に存在する所定の先行車両Qに対して、右レーダ11Rの検出領域ARの左端と先行車両Qの後部左端QLとが一致するようにして配置されている。また、左レーダ11Lは、車両(自車両P)から前後方向前方に所定距離だけ離れた位置に存在する所定の先行車両Qに対して、左レーダ11Lの検出領域ALの右端と先行車両Qの後部右端QRとが一致するようにして配置されている。
(もっと読む)
衝突予測装置
【課題】自車の前方に検出されたターゲットの自車に対する相対位置に応じて、当該ターゲットが自車の左側を通過するか、または右側を通過するかを予測し、自車とターゲットとの衝突可能性を適切に推定する衝突予測装置を提供する。
【解決手段】本発明の衝突予測装置は、自車の前方にターゲットを検出するターゲット検出手段と、ターゲットの自車に対する相対位置を算出する相対位置算出手段と、当該相対位置に基づいて、ターゲットが、自車の左側を通過するか、または右側を通過するかを示す通過予測情報を設定する通過予測情報設定手段と、相対位置の変化を監視する相対位置監視手段と、相対位置の変化に基づいて、通過予測情報設定手段によって設定された通過予測情報を変更する通過予測情報変更手段と、通過予測情報に基づいて、自車とターゲットとの衝突可能性を推定する衝突可能性推定手段とを備える。
(もっと読む)
障害物検出装置
【課題】低コストで障害物の存在方向を検出可能な障害物検出装置を提供する。
【解決手段】車両の周辺に周波数変調を施したシングルビームの検知波信号を照射し、当該検知波信号が障害物から反射されて成る反射波信号に応じたビート信号を取得するFM−CW方式のレーダー装置と、車両が所定距離移動する毎にレーダー装置において受信したビート信号を記憶する記憶手段と、記憶装置に記憶された反射波信号を、当該ビート信号を受信した各時点から現時点までの車両の移動距離に応じた位相だけ各々シフトさせる位相シフト手段と、位相シフト手段によりシフトされたビート信号を、複数のアンテナ素子において同時に受信した反射波信号とみなしてディジタルビームフォーミング処理することによって障害物の存在方向を算出するビーム合成手段とを備えることを特徴とする障害物検出装置である。
(もっと読む)
先行車位置判定装置
【課題】GPSによる相対距離および相対速度等の位置情報と、自律センサによる位置情報とを比較して先行車両を特定する際に、複数の他車両が存在する場合はGPSによる位置情報の誤差に応じて比較の閾値を変化させることで、より厳密に先行車を特定することができる先行車位置判定装置を提供することを課題とする。
【解決手段】ECUは、自車両と当該自車両前方を走行する他車両との相対位置に関する相対位置情報、および、当該相対位置の誤差に関する誤差情報を取得し、自車両の直前を走行する先行車の位置を検出し、取得された相対位置情報に基づく相対位置と、検出された位置とを比較して先行車の位置を特定し、複数の他車両の相対位置情報が取得された場合、取得された相対位置情報に基づく相対位置と、検出された位置とを、誤差情報に応じて変化させた閾値を用いて比較して先行車の位置を特定する。
(もっと読む)
前方環境認識装置、およびそれを備えた車両誘導システム
【課題】ゲート手前に車両が並んでいる場合であっても、自車両前方の物標情報を検出して、ゲートを認識することが可能な前方環境認識装置、およびそれを備えた車両誘導システムを提供する。
【解決手段】検出された物標Pの情報に基づいて、物標Pの平面分布形状Hを算出する。前方環境認識装置1は、平面分布形状Hから、自車両側へ突出する山型分布形状Y1〜Y3を判別し、判別された山型分布形状Y1〜Y3に対応する位置に障害物C1〜C3が存在するゲートG1〜G3が有ると認識する。これにより、ゲートG1〜G3の手前に他車両C1〜C3などの障害物が存在する場合であっても、自車両前方の物標Pの情報を検出して、ゲートG1〜G3を認識することができる。
(もっと読む)
物体検出装置
【課題】カメラとレーダ等の複数のセンサを用いて物体を検出する物体検出装置において、複数のセンサから得られる情報を利用して検出精度を向上する。
【解決手段】光、電波、超音波の少なくとも一つの信号により物体を計測する少なくとも二つの計測部と、該計測部から得られる出力信号を処理する処理部2を具備する物体検出装置1において、前記少なくとも二つの計測部は、少なくとも二つの互いに異なる計測原理で構成される計測部であって、前記複数の計測部から得られる複数の出力信号を、共通の処理系のメモリに格納する取込手段を具備し、前記出力信号を、前記複数の計測部から得られる出力信号を共通の処理部2で処理する。
(もっと読む)
干渉防止レーダ装置
【課題】電波を送信する他の装置との電波干渉をより確実に防止することのできる干渉防止レーダ装置を提供する。
【解決手段】ミリ波を発信して当該ミリ波に対する反射波を受信するレーダセンサ1を有し、受信された当該反射波により周囲環境を検出する干渉防止レーダ装置10であって、ミリ波を発信する他のレーダ装置と同期してレーダセンサ1によりミリ波を発信するために用いられる時刻同期信号を受信する同期信号取得部42と、同期信号取得部42により受信された時刻同期信号に対応する方角に向けてミリ波が発信されるように、レーダセンサ1を制御する時分割駆動制御部41と、を備える。この干渉防止レーダ装置10により、ミリ波を送信する他の装置との電波干渉をより確実に防止することができる。
(もっと読む)
車両の制御装置
【課題】車両の走行中において、先行車の検知と消費電力低減とを両立すること。
【解決手段】車両の前方の先行車を検知する先行車検知手段と、前記先行車検知手段の駆動及び駆動停止を制御する制御手段と、を備えた車両の制御装置において、前記制御手段は、前記車両が規定速度以上で走行中に、前記先行車検知手段が先行車を検知しない場合は前記先行車検知手段の駆動を停止し、その後、予め定めた復帰条件が成立した場合は前記先行車検知手段を再駆動することを特徴とする。
(もっと読む)
物体認識装置
【課題】レーダのスキャン結果からの頭上看板等の誤検出を精度よく判定する。
【解決手段】制御ECU2により、先行車を検出している状態でレーダ5の反射ビームから先行車より前方に検出した静止物体を頭上看板等の誤検出物体と判定し、静止した車両等を頭上看板等と誤って判定することなく、頭上看板等の誤検出を精度良く判定する。
(もっと読む)
信号処理装置、及びレーダ装置。
【課題】 電子スキャン方式のレーダ装置においてアンテナ間隔をある程度離間させた状態であっても、方位角検出範囲を広角化する。
【解決手段】 目標物体に反射された送信信号を複数のアンテナで受信して前記アンテナごとのビート信号を生成するレーダ送受信機の信号処理装置は、前記ビート信号を合成して合成ビート信号を生成する合成手段と、前記ビート信号のいずれかと前記合成ビート信号に基づいて前記目標物体の方位角を検出する方位角検出手段とを有するので、アンテナ対の間に仮想アンテナを配置した場合にこの仮想アンテナにより得られるビート信号と同じ位相の合成ビート信号を得ることができ、ビート信号と合成ビート信号とに基づき方位角を検出することで、アンテナ間隔をある程度離間させたままで位相折り返しが発生しない方位角検出範囲を広角化できる。
(もっと読む)
車両移動状況検出装置および車両移動状況検出方法
【課題】 自車両の進行に関する方位と対地車速を正確に検出し物体への接近を確実に回避する。
【解決手段】複数の側方監視用レーダ装置21,22を用いて、静止物体を識別する。静止物体RM1,RM2の方位および相対速度の検出値に基づいて空間的に密集して存在する物体を静止物体RM1,RM2と判定し、該判定された静止物体を成す物体(反射点)のうち自車両から最至近に位置する物体T11,T21に関する方位および相対速度の情報に基づいて物体との接近の蓋然性を判断し、車両制御装置50にこの蓋然性低減のための信号を供給する。
(もっと読む)
信号処理装置、レーダ装置、及び信号処理方法
【課題】 車両制御上重要な目標物体を示すピーク信号を高い確度で優先的に抽出する。
【解決手段】 周波数変調が施された送信信号の反射信号を受信して前記送信信号と受信信号の周波数差を有するビート信号を生成するレーダ送受信機の信号処理装置は、前記ビート信号の周波数スペクトルにおけるピーク信号に基づき目標物体の方位角を検出する方位角検出手段と、所定の方位角範囲及び所定の相対距離範囲に対応するピーク信号を優先的に抽出するピーク信号抽出手段と、前記抽出されたピーク信号から前記目標物体を検出する目標物体検出手段とを有するので、車両制御上重要度の高い方位角範囲及び相対距離範囲にある目標物体を示すピーク信号をもれなく検出できる。
(もっと読む)
信号処理装置、及びレーダ装置
【課題】車両の前側方監視用レーダ装置において目標物体の位置を精度よく検出する。
【解決手段】 車両に搭載されるとともに前記車両の側方の領域を含む走査領域を走査するレーダ送受信機の信号処理装置は、前記車両の前側方をY軸、前記Y軸と交差する方向をX軸としたときに前記走査領域における目標物体の位置のX、Y座標を検出する位置検出手段と、過去の検出サイクルで検出された前記目標物体の位置の前記検出サイクルあたりのX座標差分値とY座標差分値とに基づき、当該目標物体の位置のX、Y座標を予測する位置予測手段と、前記検出された位置のX、Y座標が前記予測された予測位置のX、Y座標それぞれの許容範囲に含まれるときに、当該検出された位置を確定する位置確定手段とを有するので、X座標の差分値が大きい目標物体の位置を精度良く予測でき、位置検出制度を向上できる。
(もっと読む)
1 - 20 / 67
[ Back to top ]