
Fターム[5J070BF16]の内容
レーダ方式及びその細部 (42,132) | 衝突防止 (1,451) | 衝突回避 (511) | 自動制御(自動車等) (225)
Fターム[5J070BF16]に分類される特許
1 - 20 / 225
車両用移動物体検出装置
【課題】自車両周辺における移動物体の移動状態ならびに移動量の認識精度を向上した車両用移動物体検出装置を提供することことを課題とする。
【解決手段】移動遷移状態把握部13によって、自車両の移動量に基づいて回避対象物体の特徴点位置の移動遷移状態を算出し、回避対象物体の特徴点位置の移動遷移状態に基づいて、回避対象物体の移動を認識する。また、移動量算出部19によって、回避対象物体における特徴点位置の移動遷移状態に基づいて、自車両に対する回避対象物体の相対的な移動量を算出し、回避対象物体の移動遷移状態を認識する処理周期と比較して十分に長い周期で回避対象物体の移動量を算出する。
(もっと読む)
車両周辺監視装置

【課題】車両周辺の監視領域に存在する対象物を少なくともレーダ装置により検知する場合に、監視領域に存在する個々の対象物の検知の信頼性を高めることができる車両周辺監視装置を提供する。
【解決手段】レーダ装置2よりレーダ電波の走査を行なう車両周辺の監視領域を車載カメラ3により撮像し、撮像画像の色情報又は輝度情報に基づいて、監視領域におけるレーダ電波の反射率の分布を反射率推定手段5により推定する。レーダ電波の反射波に受信強度に対する閾値(監視領域の各局所に対応する閾値)を、受信強度閾値設定手段6により、推定した反射率の分布に応じて設定する。対象物認識手段7は、少なくとも前記反射波の受信強度と前記設定された閾値との比較に基づいて前記監視領域に存在する対象物を検知する。
(もっと読む)
衝突回避装置、ヘリコプタ、及び衝突回避プログラム
【課題】ヘリコプタが障害物に近接した状態でも、ヘリコプタの障害物への衝突を回避する飛行を可能とする、ことを目的とする。
【解決手段】ヘリコプタ10は、GPS受信部34によって、受信したGPS信号に基づいて自機の位置を検知し、距離センサ18によって、自機と周囲の障害物との距離を測定する。そして、ヘリコプタ10は、詳細情報生成部40によって、地図情報記憶装置52に記憶されている地図情報から距離センサ18で検知した自機の位置を含む自機周囲情報を読み出し、読み出した自機周囲情報と距離センサ18による測定結果とから、自機の周囲の形状を示す自機周囲詳細情報を生成し、飛行制御部32によって、自機周囲詳細情報と自機の大きさとに基づいて、自機が障害物へ衝突することを抑制するための制御を行う。
(もっと読む)
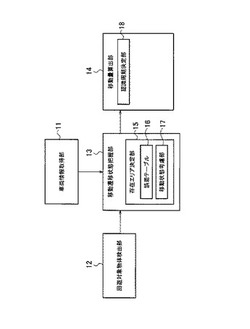
駐車空間検出装置
【課題】従来とは異なる新規な方法で、精度よく障害物間のスペースの長さを検出することを目的とする。
【解決手段】距離センサによって測定された距離およびその時点における距離センサの位置を繰り返し測定し、測定された距離およびセンサ位置をそれぞれ半径および中心とする検出円を算出し、各検出円上に駐車車両の輪郭点を算出するため、連続する2つの検出円C1、C2の共通外接線Tを算出し、検出円C2と共通外接線Tの接点を輪郭点とし、このように算出された各輪郭点に基づいて、駐車車両の端部を算出する。
(もっと読む)
障害物認識装置
【課題】車両の進行方向の速度変化と共に車両の進行方向と垂直な左右方向の速度変化も判断することで、障害物検出率の向上を図った障害物認識装置を提供する。
【解決手段】レーダを介して検出した物標について、物標の情報と車両の走行情報とに基づき、車両の進行方向に関する絶対速度及び車両の左右方向に関する絶対速度の両方を判断する。両方の絶対速度が所定の基準値以下であると判断された場合、すなわち物標が路面を移動していないと判断された場合に限り、レーダ検出によって得られる情報とカメラ等によって撮像される画像情報とをフュージョンした情報を用いて物標の立体物判断を行う。いずれかの絶対速度が所定の基準値を超える場合には、レーダ検出によって得られる情報のみによって物標の立体物判断を行う。
(もっと読む)
車両用対象物検出装置、およびその方法
【課題】自車両から見て同一方向に複数の対象物が存在する場合でも対象物の詳細な情報を正確に取得することを可能とする、車両用対象物検出装置、およびその方法を提供する。
【解決手段】車両用対象物検出装置であって、対象物のレーダ情報を取得するレーダ情報取得手段と、画像を撮像する画像撮像手段と、画像撮像手段によって撮像された画像から画像情報を取得する対象となる第1の画像処理領域を設定する第1の画像処理領域設定手段と、自車両から見て同一方向に複数の対象物のレーダ情報が取得された場合、第1の画像処理領域とは異なる第2の画像処理領域を設定する第2の画像処理領域設定手段と、第2の画像処理領域内の画像情報を取得する画像情報取得手段と、レーダ情報と画像情報とに基いて、第2の画像処理領域内の対象物についての詳細な情報を取得する詳細情報取得手段とを備える。
(もっと読む)
走行支援装置
【課題】車両の前方の検出領域において、車両の進路に向かって横方向から検出領域に進入した物体を極力速く検出して警報を指令するとともに、誤検出を考慮して不適切な衝突回避の実行を防止する走行支援装置を提供する。
【解決手段】走行支援装置は、検出領域の外部から検出領域に、車両の進路に向かって横方向から進入した物体の横移動速度が所定速度以上であり、かつ物体と車両との距離が所定距離以下である場合(S402:Yes)、検出領域の範囲内で通常警報領域の側方に通常警報領域よりも横方向に広がる拡張警報領域を設定する(S408)。車両支援装置は、通常警報領域の外部の拡張警報領域の範囲内であれば(S410:No)、運転者によりブレーキ操作およびステアリング操作がなされておらず、車両と物体との衝突予測時間が所定の警報時間以下の場合(S412:Yes)、運転者に対する警報だけを車両制御ECUに指令する(S414)。
(もっと読む)
先行車検出装置
【課題】従来に比して正確に先行車の位置を検出可能な先行車検出装置を提供する。
【解決手段】自車両の前方を走行する先行車の位置を検出する先行車検出装置であって、少なくとも先行車の左右方向の位置情報を検出する先行車位置検出手段と、現時点において検出した位置情報を補正するフィルタ補正手段と、先行車の走行状態を推定する先行車走行状態推定手段と、フィルタ補正手段による補正の度合いを、先行車走行状態推定手段によって推定された先行車の走行状態に応じて変更するフィルタ制御手段とを備える先行車検出装置である。
(もっと読む)
車載用レーダ装置及び車載用レーダシステム
【課題】多周波変調異常を検出する機能を有する車載用レーダ装置を提供する。
【解決手段】2周波CW変調処理部101のように、送受信信号のIF信号に位相差が発生するような変調処理方式と、FM変調処理部102のように、送受信信号から得られるドップラ周波数がターゲット距離に応じて変動するような特性を持つ変調方式を有し、前記位相差から算出されるターゲット距離と、前記ドップラ周波数の変動量から算出されるターゲット距離の差分が所定値以上になった場合、多周波変調処理が異常であると判断することができる。
(もっと読む)
前方環境認識装置、およびそれを備えた車両誘導システム
【課題】ゲート手前に車両が並んでいる場合であっても、自車両前方の物標情報を検出して、ゲートを認識することが可能な前方環境認識装置、およびそれを備えた車両誘導システムを提供する。
【解決手段】検出された物標Pの情報に基づいて、物標Pの平面分布形状Hを算出する。前方環境認識装置1は、平面分布形状Hから、自車両側へ突出する山型分布形状Y1〜Y3を判別し、判別された山型分布形状Y1〜Y3に対応する位置に障害物C1〜C3が存在するゲートG1〜G3が有ると認識する。これにより、ゲートG1〜G3の手前に他車両C1〜C3などの障害物が存在する場合であっても、自車両前方の物標Pの情報を検出して、ゲートG1〜G3を認識することができる。
(もっと読む)
車載レーダ装置
【課題】近距離の目標を検知でき、演算量を増やすことなく、遠距離の目標も検知できる車載レーダ装置を得る。
【解決手段】送信信号の周波数を三角波により周波数変調する周波数変調手段81と、周波数変調された送信信号をパルス化して送信パルスとして目標83に送信する送信手段82と、反射した信号を受信パルスとして受信し、周波数変調された送信信号の一部と受信パルスとの周波数差よりビート信号を生成する受信手段84と、送信パルスの送信タイミングを基にして、受信パルスのサンプリングタイミングを定めるレンジゲートを設定するレンジゲート設定手段88と、設定されたレンジゲート毎に、ビート信号をサンプリングするサンプリング手段85と、サンプリングされたビート信号に基づいて目標83までの距離と相対速度を算出する距離・相対速度算出手段86と、自車速に応じて送信パルス幅とレンジゲート幅を変更する制御手段87とを設けた。
(もっと読む)
車両制御装置
【課題】より確実に先先行車を検出してロストを防止する確率を高めることにより、他車両の位置に応じた処理における利便性を高めることができる車両制御装置を提供する。
【解決手段】車両制御装置10は、自車両Cの進行方向に照射したミリ波の先先行車両Bからの反射波を受信して得られる先先行車両Bの位置情報に基づいて自車両Cの速度制御を行なう車両制御装置において、先先行車両Bを検出できていないロスト状態が発生中であるか否かを検知するロスト検知部1と、ロスト検知部1によりロスト状態が発生中であると検知された場合に、自車両Cの周囲に反射物が存在するか否かを判定する反射判定部2と、反射判定部2により反射物が存在すると判定された場合に、自車両Cの走行軌道を反射物方向へ変更させる車両制御部3と、を備える。
(もっと読む)
物体検出装置、物体検出装置を備えた車両の安全システム
【課題】上下方向の分解能が所定レベルに満たないレーダによって検出された静止物体が車両の走行にとっての障害物であるか否かを精度良く判定可能な物体検出装置を提供する。
【解決手段】レーダ部10と、レーダ部10により自車両の前方に存在する絶対速度が所定値未満の物体を静止物体として検出する静止物体検出部20と、自車両の前方に存在する絶対速度が所定値以上の物体を移動物体として検出する移動物体検出部30と、静止物体の検出位置の周囲に、その範囲に存在する移動物体は該静止物体に衝突することを回避不可能又は該静止物体に既に衝突したと推定できるように定められる所定の探索範囲を設定する設定部40と、移動物体の検出結果のうちに検出位置が前記探索範囲に入る検出結果が存在する場合、前記検出された静止物体は自車両の走行にとって障害とならない非障害物であると判定する判定部50と、を備える。
(もっと読む)
衝突被害軽減装置
【課題】衝突被害軽減装置のブレーキ作動後、所定条件下でブレーキ作動状態を解除する。
【解決手段】ブレーキ作動後、障害物がレーダの死角に入ったか否かを判定する(S6、S7)。障害物が死角に入れば、少なくとも、死角に入ってから測定される車速Vm、並びに、死角に入ってからの経過時間tcに基づいて、障害物までの推定距離Xを演算する(S14、S15)。そして、衝突が検出されず、且つ、推定距離Xが0以下であるときに、死角に入った障害物との衝突を回避できたと判定して、ブレーキ作動状態を解除する(S16、S17、S11)。このため、車両を迅速に通常走行へと復帰させることができる。
(もっと読む)
信号処理装置、及びレーダ装置
【課題】FM−CW方式と位相モノパルス方式とを併用したレーダ装置において、同じ相対距離と相対速度を有する複数の物標が存在する場合であっても、個々の物標の方位角を正確に検出する。
【解決手段】
一対の物標に対応して一対の前記ビート信号が生成されたときに、第1の物標に対応する前記ビート信号の第1のレベルと第2の物標に対応する前記ビート信号の第2のレベルとを記憶するレベル記憶手段と、一対の物標に対応して単一のビート信号が生成されたときに、当該単一のビート信号のレベルから、前記第1のレベルに対応する第1の位相と、前記第2のレベルに対応する第2の位相を導出する位相導出手段を有し、前記一対のアンテナにおける前記第1、第2の位相の差に基づいて、第1、第2の物標の方位角をそれぞれ導出するので、個々の物標の方位角を正確に検出できる。
(もっと読む)
物体認識装置
【課題】車載レーダの反射の検出パターンから車両、自転車、人(歩行者)等を区別して精度よく認識する新規な物体認識装置を提供する。
【解決手段】特徴抽出部8、分類スコア算出部9により、フレーム毎のレーザレーダ2の反射の検出パターンを、物体毎に用意した複数の特徴パターンのいずれかに分類し、さらに、物体属性推定部10により、段の時系列の複数フレームのパターン認識の分類結果を累積することで、物体の移動の方向や姿勢等の時間変化を吸収し、それらの影響を排除して物体を正確に認識する。
(もっと読む)
少なくとも1つの平面アンテナ装置を備えたレーダセンサ装置
本発明は、間引きアレイ(15.2)として平面上に互いに所定間隔で並行に配置された複数の垂直面指向型の縦列アンテナ(15b、15c、15d)を有する少なくとも1つの平面アンテナ装置を備えたレーダセンサ装置であって、各縦列アンテナ(15b、15c、15d)は少なくとも2つのライン給電されるパッチ素子(23)を有する、上記レーダセンサ装置において、縦列アンテナ(15b、15c、15d)による間引きアレイ(15.2)は、当該間引きアレイ(15.2)内での縦列アンテナ(15b、15c、15d)の互いの所定間隔の量が、縦列アンテナの同一のアンテナ開口及び同一の特性を備えるアンテナ平面アンテナ装置の対応する非疎なアレイの、2つの任意の縦列アンテナ間の様々な間隔の総量を少なくとも一度、しかし可能な限り最小回数有するように、最小の冗長性を有して実現される。 (もっと読む)
信号処理装置、レーダ装置、車両制御システム、信号処理方法、および、プログラム
【課題】物体情報を正確に検出できるレーダ装置を提供する。
【解決手段】連続する複数回の物体検出処理において、同一の物体に係る物体情報が連続的に検出されるかを判定する。過去の物体検出処理において検出された物体情報に基づいて、この物体情報の略整数倍の物体情報を有する特定物体情報を検出し、特定物体情報が検出された場合には、特定物体情報の物体情報を整数で除算した物体情報を有する予測物体情報を仮想的に設定する。そして、物体情報の設定は直近の物体検出処理において検出される物体情報と、前記予測物体情報とのいずれも判定対象とする。これにより、物体情報を正確に検出できる。
(もっと読む)
物標情報推定装置
【課題】レーダ波を用いて検出される物標に関する情報(少なくとも路面からの高さ)を少ない処理負荷で検出する。
【解決手段】判定の対象となる選択物標との距離が100mより大きく(S410:YES)、且つ、中位物標のヌル距離ではない(S420:YES)場合、選択物標の受信電力がヌルポイント(外挿フラグGF=1又は前サイクルの受信電力との電力差ΔPが10dB以上)になっていれば(S430:YES or S460:YES)、その選択物標を高位物標と判定する(S440)。選択物標との距離が100m以下(S410:NO) の場合は、選択物標の受信電力がヌルポイントになっていれば(S470:YES or S500:YES)、その選択物標を中位物標と判定し(S480)、ヌルポイントになっていなければ、その選択物標を低位物標と判定する(S510)。
(もっと読む)
レーダ装置、信号処理装置
【課題】
指向角度を間引いてレーダ信号を送出しても物標の角度検出精度の低下を防止する。
【解決手段】
アンテナが第1の方向に回動するときには、前記アンテナにより間欠的な第1の指向角度群でレーダ信号を送受信し、前記送受信されたレーダ信号の周波数差を有する第1のビート信号群を生成し、前記第1の方向と反対の第2の方向に回動するときには、前記アンテナにより前記第1の指向角度群とは異なる間欠的な第2の指向角度群でレーダ信号を送受信し、前記送受信されたレーダ信号の周波数差を有する第2のビート信号群を生成する。そして、前記第1のビート信号群の第1のピークと、前記第2のビート信号群の第2のピークとを検出し、前記第1のピーク形状における極大値と前記第2のピーク形状における極大値とに基づき、物標の角度を検出するので、物標の角度検出精度の低下を防止することができる。
(もっと読む)
1 - 20 / 225
[ Back to top ]