
Fターム[5J070BF21]の内容
レーダ方式及びその細部 (42,132) | 衝突防止 (1,451) | レーダデータと他のデータとの結合 (112)
Fターム[5J070BF21]に分類される特許
1 - 20 / 112
車両用物体検知装置
【課題】自車両の外部に存在する物体の静止および移動の状態を精度良く検知する。
【解決手段】車両用物体検知装置10は、レーダ装置12から発信された電磁波の物体上における反射点の位置を算出する反射点算出部21と、自車両から物体までの距離を算出する距離算出部22と、反射点の位置に基づき物体の水平方向の両方の端点を検出する端点検出部23と、検知対象物の何れか一方の端点が自車両から見て比較対象物に重なっているか否かを判定する重なり判定部24と、重なり判定部24により重なっていると判定され、かつ、時間経過と共に検知対象物までの距離が比較対象物までの距離よりも近くなった場合に、検知対象物の前記比較対象物に重なっていない他方の端点の横移動量に基づいて検知対象物の横移動速度を算出する端点移動速度算出部25とにより、検知対象物の横移動速度の検出精度を向上させる。
(もっと読む)
レーダ装置

【課題】 従来のレーダ装置は、全方位に亘って同一PRIを使用しているため、見通し外となる範囲を含む方位に対しても同一PRIを使用し、時間的リソースを有効に使用できていない。
【解決手段】 この発明のレーダ装置は、自己位置を検出する自己位置検出部と、前記自己位置検出部で検出した自己位置周辺の地形データを記憶する地形データベースと、前記地形データを用い前記自己位置を中心とした方位毎の見通し距離を算出し、当該見通し距離に基き方位毎のPRI(Pulse Repetition Interval)を算出する算出部と、前記方位毎のPRIに基いて、各方位に向けて前記方位に関連付けされたPRIの電波を放射する送信制御部とを備えるようにした。
(もっと読む)
電波発射源検出センサ及び自動料金収受システム
【課題】所定のレーンに設置された路側器と、その隣接レーンに存在する車載器との間で確立された誤通信を中断し、車載器に対する誤課金を防止することが可能な電波発射源検出センサと、このセンサを用いた自動料金収受システムとを提供する。
【解決手段】第1及び第2のレーンに設置され、移動体に所持された応答器と通信を行う第1及び第2の路側器と接続する電波発射源検出センサは、アンテナ部、検波部、方向特定部、誤通信判定部を具備する。アンテナ部は、第1及び第2のレーンを含む受信ビームにより、応答器からの応答信号を受信する。検波部は、応答信号から必要信号を検波する。方向特定部は、検波結果に基づいて、電波強度、到来方向及び応答周波数を取得する。誤通信判定部は、電波強度、到来方向及び応答周波数に基づき、応答器との通信は誤りであるとの旨の誤通信通知を第1及び第2の路側器へ出力する。
(もっと読む)
レーダ装置及び質問送信方法
【課題】他局のレーダ装置と連携して確実に目標を検出できるようにする。
【解決手段】本実施形態に係るレーダ装置1Aは、自局覆域と一部の覆域が重なる他局のレーダ装置1Bと通信回線を介して接続され、アンテナ11から目標に質問信号を送信し、目標からの応答信号を受信する送受信部12と、他局から目標の位置情報を通信回線を介して取得する通信処理部14と、通信処理部14により取得された目標の位置情報に基づいて上記一部の覆域から一定幅の外側領域に目標が進入するタイミングで質問信号を送信させる質問制御部14とを具備する。
(もっと読む)
レーダ情報処理装置及びレーダ情報処理プログラム
【課題】管制対象とする航空機目標を速やかに自動追跡に移行できるようにする。
【解決手段】レーダ情報処理装置3は、ASR/SIF(SSR)装置1から第1の更新レートで更新される第1のレーダ情報を受信し、PAR装置2から上記第1の更新レートより高い第2の更新レートで更新される第2のレーダ情報を受信し、第1のレーダ情報と航空機の飛行計画情報とを対応付ける第1の相関処理部31と、第1のレーダ情報をもとに第1の更新レートより短い周期で航空機の位置を予測する追跡処理部32と、追跡処理部32により予測された位置をもとに第1のレーダ情報と第2のレーダ情報とを対応付ける第2の相関処理部とを備える。
(もっと読む)
物体検出装置
【課題】従来に比して物体を正確に検出可能とする物体検出装置を提供する。
【解決手段】自車両周辺の物体を検出する物体検出装置であって、自車両に搭載され、検知領域内に存在する物体を検出する物体検出手段と、少なくとも自車両が走行する道路の周辺に存在する障害物の位置情報を外部から取得する周辺情報取得手段と、物体検出手段の検知領域を周辺情報取得手段によって取得した障害物の位置情報に応じて変更する検知領域変更手段とを備える物体検出装置である。
(もっと読む)
角速度推定装置及びコンピュータプログラム及び角速度推定方法
【課題】移動体の角速度を精度よく推定する。
【解決手段】周辺物体観測装置811(レーダ)は、移動体の周辺に存在する物体について、移動体を基準とした物体の相対位置を繰り返し観測する。相対位置取得部211は、周辺物体観測装置811が観測した観測結果を取得する。静止物体判定部220(停止物識別部)は、周辺物体観測装置811が相対位置を観測した物体が静止しているか否かを判定する。物体相関部230(停止物用追尾部)は、周辺物体観測装置811が観測した複数の相対位置のなかから、同一の物体について周辺物体観測装置811が観測した複数の相対位置を判定する。角速度推定部(状態推定部240、軌道推定部)は、移動体の角速度を推定する。
(もっと読む)
車両の周辺監視装置
【課題】レーダデータと赤外線カメラデータの同期ずれを補正する。
【解決手段】車両の周辺の物体を検出するレーダと、車両の周辺の画像を撮像するカメラと、を備える車両周辺監視装置において、レーダが検出した物体の位置に対応する、カメラが撮像した対応画像上の所定領域を特定して当該所定領域内の前記物体を特定する手段とを備え、特定された対応画像上の所定領域の移動量の時間変化と、カメラが撮像した画像上での所定物体の移動量の時間変化との位相ずれ量を算出する手段と、位相ずれ量がゼロになるように、レーダまたはカメラの出力信号の位相補正をおこなう位相補正手段と、を有する。
(もっと読む)
車載レーダシステム
【課題】ノイズ環境に応じた適切なノイズ対応処理を実施し、物体の誤検出を防止しつつレーダ性能を確保する。
【解決手段】ノイズ源200を中心とする円形の領域を設定し、この円形の領域を、比較的マルチパスの少ない領域R1と、マルチパスの発生が多く、自車両100のレーダ性能に重度の影響が予想される領域R2とに区分する。そして、測位装置からの測位情報により、自車両100の現在位置が領域R1内にあるとき、車載レーダ装置の受信信号のサンプリング間隔と送信電力との少なくとも一方を自車両100の進行方向に応じて変更し、自車両100が領域R2内に進入したときには、ノイズ源の出力の規則性に基づいて受信信号を取得する処理を行う。これにより、ノイズ環境に応じた適切なノイズ対応処理を実施するので、ノイズ環境下においても物体の誤検出を防止しつつレーダ性能を確保することができる。
(もっと読む)
道路端検出装置
【課題】自車両が走行する道路の道路端を検出する道路端検出装置において、道路端を検出する際の精度を向上できるようにする。
【解決手段】認識システムでは、道路端位置認識処理にて、自車両の進行方向における道路端の候補となる複数の検出点、および自車両の挙動の検出結果を取得する(S110)。そして、自車両が各検出点の真横まで移動したと仮定したときにおける自車両の位置に対する各検出点の位置を表す通過位置を、自車両の挙動に基づいて検出点毎に演算し、演算された各通過位置を、自車両と各検出点との距離に応じて予め設定された単位距離毎に複数のグループに振り分けたヒストグラムを生成する(S120)。このヒストグラムにおいて最も多くの通過位置が振り分けられたグループの代表値を自車両に対する道路端の位置として設定する(S130)。
(もっと読む)
衝突被害軽減装置
【課題】山岳路走行等で衝突被害軽減装置によるブレーキ作動を禁止する。
【解決手段】操舵角θが車速VSPに応じて設定された所定値θ1より大きい所定レベル以上のカーブ走行が、所定値x1以上の頻度xで行われる所定走行状態が検出されたとき、衝突被害軽減装置によるブレーキ作動を禁止するモードを設定し、その後、所定時間内に所定走行状態が再検出されれば、さらに、その時点から所定時間継続して「ブレーキ作動禁止モード」を維持し、所定時間内に所定走行状態が再検出されなければ、「ブレーキ作動禁止モード」を終了する。
(もっと読む)
物体検出装置及び運転支援装置
【課題】警報対象とはならない物体に対して警報が行なわれることを抑制する。
【解決手段】レーダで自車両の後側方の車両を検出する物体検出装置において、自車両の進行方向に複数の車線を有する道路を走行するときに、自車両が走行している車線を取得する取得手段と、レーダにより検出される物標を車両として認識するときの条件を、取得手段により取得される車線に基づいて変更する認識条件変更手段と、を備える。
(もっと読む)
道路曲率見積もりシステムおよび自動車目標状態見積もりシステム
【課題】道路の曲率を見積もる。
【解決手段】第一のカルマンフィルター(52)は、ヨーレートおよび速さの測定値をホスト車両内のそれぞれのセンサー(16、18)の測定値から見積もり、第二のカルマンフィルター(54)はそれらから道路曲率のクロソイドモデルのパラメータを見積もる。レーダーシステム(14)からのレンジ、レンジレートおよびアジマス角の測定値は、目標車両36の状態の非束縛の見積もりを提供するために拡張されたカルマンフィルター(56)によって処理される。関連する道路に束縛された目標の状態の見積もりは一または二以上の道路のレーンについて発生され、独立でまたは組み合わせで非束縛の見積もりと比較される。もし束縛された目標の状態の見積もりが非束縛の見積もりに対応しているなら、目標車両の状態は非束縛及び束縛の見積もりの統合で発生され、そうでないならば、非束縛の見積もりのみで与えられる。
(もっと読む)
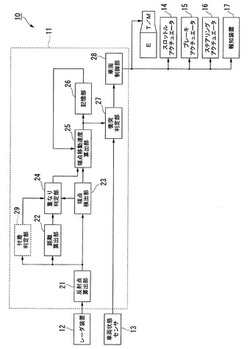
物体検出装置
【課題】路側物近傍を走行する車両の位置を正確に検出する。
【解決手段】物体検出装置1は、車両に搭載され、レーダセンサからなる第1センサ24とは相違するセンサである第2センサ21〜23を介して、該車両の周囲に存在する物体を検出する路側物検出部11と、路側物検出部11によって路側物が検出されているか否かを判定する判定部12と、判定部12によって路側物が検出されていると判定された場合に、第2センサ21〜23を介して、前記路側物の位置情報を取得する位置取得部13と、位置取得部13によって取得された前記路側物の位置情報に基づいて、第1センサ24を介して、前記路側物の近傍を走行する他の車両を検出する車両検出部14と、を備える。
(もっと読む)
車載表示装置
【課題】ヘッドライトの点灯が必要な走行時に、安全かつ快適に車間距離の確保を運転者に促すことが可能な車載表示装置を提供する。
【解決手段】車載表示装置1では、制御部10が、各センサ及びスイッチ類2〜6からの入力情報に基づいて各種処理を実行し、ピクセルライト7を介して、自車両に対する前方側の路面上に照明光を照射し、画像デバイス8を介して、ピクセルライト7の投射領域に、安全車間距離を表す指標画像を表示する。このため、安全車間距離を表す指標画像が車両前方の道路(実像)上に表示されるため、運転者の視線が車外前方から外れずに済むと共に、運転者の焦点が実像上の指標画像に合いやすくなり、例えば夜間や夕方におけるヘッドライト6の点灯が必要な走行時に、安全かつ快適に車間距離の確保を運転者に促すことができる。
(もっと読む)
車両の制御装置
【課題】車両の走行中において、先行車の検知と消費電力低減とを両立すること。
【解決手段】車両の前方の先行車を検知する先行車検知手段と、前記先行車検知手段の駆動及び駆動停止を制御する制御手段と、を備えた車両の制御装置において、前記制御手段は、前記車両が規定速度以上で走行中に、前記先行車検知手段が先行車を検知しない場合は前記先行車検知手段の駆動を停止し、その後、予め定めた復帰条件が成立した場合は前記先行車検知手段を再駆動することを特徴とする。
(もっと読む)
車載レーダ装置、及びターゲット認識方法
【課題】対向車からのレーダを直接受信するような強い干渉電波が生じる場合においても、干渉波の影響を最小限に抑えて、正確な測距や測角ができるレーダ装置を提供する。
【解決手段】レーダ装置の送受信部100は、アンテナ素子101と、アンテナ素子101に対する信号の位相又は振幅の少なくとも一方を調整するウエイト調整部102と、加算部103とを備え、制御部104は、アンテナ部におけるレーダの送信又は受信を切り替える送受信制御部104cと、アンテナ部が受信した干渉波を検出する干渉波検出部104aと、干渉波検出部104aにおいて干渉波が検出された場合には、ウエイト調整部102を制御してアンテナ部における指向性のヌル点の方向を調整するヌル方向制御部104bとを備える。
(もっと読む)
船舶搭載用航行支援システム
【課題】他船舶を検出する2つの装置の検出結果を、1つの表示装置に見易く表示することを目的とする。
【解決手段】船舶搭載用航行支援システム10は、他船舶から送信された情報に基づいて他船舶の情報を取得する船舶自動識別装置18と、物標の検出を行うレーダ装置12とを備える。相関判定部は、船舶自動識別装置18が検出した他船舶と、レーダ装置12が検出した物標とが同一物体であるか否かの相関判定を行う。表示制御部は、設定されたモードに応じて、相関条件を満足する他船舶および物標のいずれか一方を表示装置34に表示する。判定判定部26は、船舶自動識別装置18が検出した他船舶の大きさとレーダ装置12が検出した物標の大きさとの比較に基づく判定を行う。
(もっと読む)
車両制御システム
【課題】路面上にある小型の制御対象外目標物体からレベルの大きい受信信号が得られた場合であっても、車両制御システムの誤動作を回避する。
【解決手段】 車両の略水平方向の探索空間にレーダ信号を送信して目標物体による反射信号を受信し、受信信号に基づき前記目標物体の距離を検出するレーダ装置を搭載した車両の制御システムであって、前記探索空間の一部を含む撮影画像から目標物体画像を検出する目標物体画像検出手段と、前記受信信号のレベルが基準レベルを上回り、かつ前記目標物体画像が前記探索空間の下部領域以外の前記撮影画像から検出されたときに、前記検出された距離に基づいて前記車両のアクチュエータの動作を制御する制御信号を出力する制御手段とを有するので、制御対象外目標物体からレベルの大きい受信信号が得られた場合であっても、車両制御システムは誤動作を回避できる
(もっと読む)
物体検出装置および物体検出方法
【課題】レーダ装置が検出した物体を精度良くグループ化することのできる物体検出装置および物体検出方法を提供する。
【解決手段】物体検出装置は、車両周辺の物体を検出することによって得られた捕捉点を示す信号を用いて、当該捕捉点それぞれの移動方向を算出する移動方向算出手段と、予め検出対象となる物体の形状に応じた枠および当該物体で想定されている進行方向として当該枠に進行基準方向を設定し、上記捕捉点のうち、上記移動方向に当該進行基準方向を合わせた当該枠内に存在する捕捉点を同じ物体の捕捉点として判定する判定手段とを備える。
(もっと読む)
1 - 20 / 112
[ Back to top ]