
Fターム[5J070BG03]の内容
レーダ方式及びその細部 (42,132) | 表示 (572) | 表示媒体 (216) | その他の表示媒体 (41)
Fターム[5J070BG03]に分類される特許
1 - 20 / 41
情報表示装置、レーダ装置、ソナー装置、及び情報表示方法
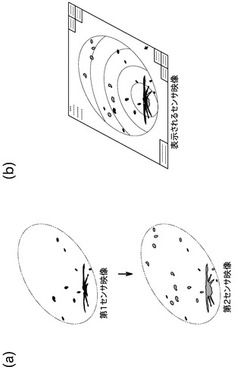
【課題】センサの検出内容に所定の処理を行って得られる情報を表示する情報表示装置において、検出対象が信号処理の影響で消えたのか検出対象自体が存在しないのかをユーザが把握できるように情報の表示を行う構成を提供する。
【解決手段】レーダ指示器(情報表示装置)は、センサ信号取得部と、信号処理部と、表示部と、を備える。センサ信号取得部は、レーダアンテナの検出内容を示す信号であるセンサ信号を取得する。信号処理部は、センサ信号取得部が取得したセンサ信号に対して、第1信号処理部による第1信号処理と、第2信号処理部による第2信号処理と、を行う。表示部は、第1信号処理部を行った第1情報を表示画面に表示するとともに、第2信号処理を行った第2情報のうち、前記第1情報と異なる情報を、当該第1情報と異なる表示形態(表示色等)で表示画面に表示する。
(もっと読む)
システム及びプログラム

【課題】 警報対象の存在を報知した場合に、ユーザがそれを見落とすことなく知ることができるシステムを提供すること
【解決手段】 警報報知する手段として、表示部5に加えてカラーLED22を光源とする発光部を設ける。制御部18は、条件を満たした場合に、LEDを光源とする発光部の発光状態を制御して警報報知をする。このとき、発光状態の制御は、警報条件を満たした警報対象に対応した発光色で発光する。
(もっと読む)
遠隔ロケーションにおけるRFIDベースの誘導
【課題】区域内でユーザを位置特定するため、および誘導するための誘導位置特定システム等を提供する。
【解決手段】クエリ信号40を送信し、応答信号42を受信するように構成されたRFID(無線周波数識別)読取りデバイス14と、区域内に配置されたRFIDタグ8を含む。RFIDタグは、その区域内のRFIDタグのロケーションに関連付けられた固有の情報を格納する。RFIDタグのそれぞれは、RFID読取りデバイスからクエリ信号を受信し、その固有の情報を伝送する応答信号をRFID読取りデバイスに送信するように構成される。RFID読取りデバイスは、応答信号を利用して、その区域内のそのRFID読取りデバイスの現在のロケーションを特定するように構成される。
(もっと読む)
目標物検出装置及びプログラム
【課題】自車の周囲に複数の目標物が存在している場合でも、各目標物と自車との位置関係を容易に認識することができる目標物検出装置を提供する。
【解決手段】自車の位置を検出するGPS受信機8と、目標物の位置情報を記憶するデータベース19と、GPS受信機で検出された位置情報と、データベースに格納された目標物の位置情報とに基づき、表示対象の目標物を抽出する制御部18と、その制御部により抽出された目標物の位置情報と、自車位置情報とを表示する表示部5と、を備える。表示部には、複数の目標物の位置と車両の現在位置とが、2次平面上に配置されるターゲットアイコンにより報知するように構成した。
(もっと読む)
物品探索装置、物品探索システム、物品探索方法および物品探索プログラム
【課題】室内のような比較的狭い範囲内で移動しながら特定の物品を簡易に探索可能な物品探索装置、システム、方法およびプログラムを得ること。
【解決手段】探索対象の物品から無線で応答信号を受信すると信号レベル検出手段13がその信号レベルを検出し、段階的表示手段14にそのまま表示するのが適切かを表示変化適否判別手段15で判別する。適切でないときは表示用信号レベル補正手段16で補正した信号レベルで表示を行う。
(もっと読む)
無線通信装置および制御プログラム
【課題】 物品の探索や存否の確認を容易かつ迅速に行うことを可能とする。
【解決手段】 一態様における携帯電話1は、送信手段、受信手段、検出手段、選択手段、登録手段、指定手段、報知手段を備える。送信手段はRFIDタグ2に問合せ信号を無線送信し、受信手段はRFIDタグ2から無線送信される応答信号を受信し、検出手段はこの応答信号の強度を検出する。選択手段は登録処理及び探索処理を選択する。登録手段は登録処理の選択時に受信手段で受信される応答信号で識別されるRFIDタグ2を記憶手段に登録する。指定手段は探索処理の選択時に記憶手段に登録されたRFIDタグ2の中から探索対象の指定を受け付け、報知手段は探索対象のRFIDタグ2からの応答信号の強度が検出手段で検出されると、その検出された強度等に応じて当該探索対象のRFIDタグ2までの距離を報知する。
(もっと読む)
画像処理装置及び画像処理方法及び画像処理プログラム
【課題】ScanSARモードで観測されたデータからレーダ画像を効率的に生成する。
【解決手段】画像処理装置100において、バーストデータ記憶部101は、ScanSARの各バーストに対する地上からの散乱波のデータをバーストデータとして記憶装置152に記憶する。スキャンデータ生成部102は、記憶装置152からバーストデータを、対応するスキャンごとに処理装置151により読み出して、スキャンごとに、読み出したバーストデータの隙間をゼロで埋めてスキャンデータを処理装置151により生成する。画像処理部103は、スキャンごとに、スキャンデータ生成部102により生成されたスキャンデータからレーダ画像を処理装置151により生成する。
(もっと読む)
自動車の安全装置および自動車
【課題】通行人や二輪車が、側後方の安全確認がなされずに開けられてしまった自動車の側部ドアと衝突する事故を未然に防止するとともに使い勝手のよい安全装置を提供すること。
【解決手段】自動車が停車中で側部ドアが閉状態であり、自動車の側後方の物体が自動車に到達するまでの到達予想時間が予め定められた所定の値以下の場合に音または表示により注意喚起を行う注意喚起モードと、注意喚起モード中に、すべての側部ドアが閉じられており、すべての側部ドアそれぞれのドアロックスイッチがロック側にある場合に移行するモードであって、物体側の側部ドアのドアロックスイッチがロック解除側へ操作されると操作されたドアロックスイッチをロック側へ戻す制御を行うドアロック制御モードとを有することを特徴とする自動車の安全装置などにより、この課題を解決する。
(もっと読む)
速度測定装置およびプログラム
【課題】 複数の異なるスポーツに関する速度を測定するのに適した速度測定装置を提供する。
【解決手段】マイクロ波ドップラーセンサ11と、そのマイクロ波ドップラーセンサ11から出力されるドップラー信号を増幅するアンプ12と、アンプ12から出力されるドップラー信号に基づいて表示用情報を生成して表示部14に表示させる制御部13とを備えるスポーツ用の速度測定装置であって、制御部13は、測定対象のスポーツにおける所定の一動作単位における表示用情報を生成する専用処理と、所定の時間間隔で繰り返し求めた瞬間速度を表示用情報として生成する汎用処理と、ユーザからの操作部14からの切替指示に基づいて前記専用処理と前記汎用処理とを切り替える切替処理とを行う。
(もっと読む)
二重偏波レーダ装置及び干渉判定方法
【課題】干渉波の混入を高精度に判定する。
【解決手段】 電力算出部172は、観測対象から反射された水平偏波受信波の電力値である水平偏波受信電力を算出し、電力算出部174は、観測対象から反射された垂直偏波受信波の電力値である垂直偏波受信電力を算出する。干渉判定部175は、垂直偏波受信電力に対する水平偏波受信電力の電力比を表す反射因子差を算出する。そして、干渉判定部175は、当該反射因子差が所定の閾値より大きい場合に、水平偏波受信波に干渉波が混入していると判定する。
(もっと読む)
駐車位置探索システム
【課題】車両方向を認識できる駐車位置探索システムを得ること。
【解決手段】本発明の駐車位置探索システムにおいて、携帯電子キー1は、探索開始ボタン11と、探索開始ボタン11がONの間、車両2との間で識別可能なIDを含む無線信号を送信する無線ID送信部12と、応答信号を受信する指向性超音波センサー13と、受信レベルを探索者へ通知する受信レベル通知部14とを備え、指向性超音波センサー13は、指向性を有し、車両2方向に向けて応答信号を受信した場合に応答信号を最大受信レベルで受信し、車両2は、無線信号を受信する無線受信部21と、受信した無線信号に携帯電子キー1との間で識別可能なIDが含まれているかを判定するID判定部22と、識別可能なIDが含まれていると判定された場合に応答信号を送信する超音波送信部23とを備える。
(もっと読む)
位置検出装置
【課題】 人や物、動物といった種々の対象に適用することができ、簡易なシステム構成で、容易に位置検出できる実用性の高い位置検出装置を得る。
【解決手段】 車載機1は、小電力データ通信可能な無線部11と、無指向性アンテナ部12と、識別情報を含む信号を生成しアンテナ部12を介して全方位に電波出力させる制御部13と、送信側制御部を駆動する操作部14を有し、移動機2は、車載機1の送信電波を受信可能な高指向性アンテナ部22と、受信電界強度を検出する無線部21と、識別情報から受信電波を判別し、受信電界強度から自動車Cとの距離およびアンテナ部22の向きに応じた位置信号を出力する制御部23と、位置信号を受けて自動車Cの遠近情報を表示する表示部25と、位置表示要求信号を出力する操作部24を設ける。
(もっと読む)
制御装置
【課題】駐車スペースの形状を算出するための処理負担を軽減できる制御装置を提供する。
【解決手段】制御装置は、車両1を基準として、所定角度毎(5度毎)に放射状に延びる線上に位置すると共に駐車スペース200を区画する各壁200b〜200dまでの距離を距離センサ26aにより検出し、その検出結果から駐車スペース200の形状を算出するので、カメラにより入力される画像を1画素ずつ解析して駐車スペース200の形状を算出する場合に比べて、制御装置のCPUの処理負担を軽減できる。
(もっと読む)
レーダシステム、及び移動体
【課題】 車体の傾きを検知する手段を特に設けなくても、レーダシステムにおけるレーダ装置の軸ずれを検出する。
【解決手段】 車両に搭載されるとともに地軸に対するアンテナの傾きを検出するセンサを有し、前記傾きが基準角度になるように調節される複数のレーダ装置と、前記レーダ装置相互で前記傾きの変化量が一致するか否かを判定し、前記変化量が一致しないときには警告出力を行う制御部とを有するので、移動体にその傾きを検知するセンサを設けなくても、レーダシステムに含まれるレーダ装置の軸ずれを検出することができる。
(もっと読む)
距離測定装置
【課題】無線信号の送受信によって対象物までの距離を求める距離測定装置において、距離測定精度を向上させることを目的とする。
【解決手段】距離測定装置10は、距離測定対象の無線タグとの間の予備的な無線信号送受信により、その無線タグから送信される直接波信号およびマルチパス信号の各到来方向を推定する。そして、直接波信号の到来方向にアレイアンテナの指向性最大方向が向けられ、マルチパス信号の到来方向にアレイアンテナの指向性ヌル方向が向けられるようアレイアンテナの指向特性を制御する。距離測定装置10は、指向特性制御されたアレイアンテナを介して無線信号の送受信を行い、無線タグまでの距離を測定する。
(もっと読む)
植生生育状況解析方法、プログラムおよび植生生育状況解析装置
【課題】人工衛星等の飛翔体から得られるレーダ画像を利用して、多時期の植生の生育状況を正確に解析できるようにする。
【解決手段】飛翔体に搭載されたレーダ装置で複数の時期に撮影された、同一対象エリアの地表面のレーダ画像を取得し、取得された複数のレーダ画像を地図データベースに保存する。次に、所定時期に撮影されたレーダ画像を基準画像として、他の時期に撮影されたレーダ画像の位置合わせを行った後、前記レーダ画像の特定領域の後方散乱係数を抽出する。さらに、前記地図データベースに保存された複数のレーダ画像のうち、前記基準画像の特定領域の後方散乱係数を基に、他のレーダ画像の後方散乱係数を較正する。そして、レーダ画像の後方散乱係数と植生の生育値の相関関係に基づいて、前記較正されたレーダ画像の後方散乱係数から当該レーダ画像に写っている植生の生育値を算出する。
(もっと読む)
レーダ判定装置、レーダ保全装置
【課題】レーダに付着した汚れの有無の誤判定を低減する、レーダ判定装置等を提供する。
【解決手段】車両1は、レーダ101、ACC(車間距離制御)制御ECU2を備える。ACC制御ECU2内に、その内部のマイクロコンピュータの機能部として構成する判定部20を備える。判定部20は、レーダ検知処理21、条件判定処理22、レーダ汚れ判定処理23を実行する。レーダ検知処理21では、レーダ101が所定時間、障害物を検知できないことを判定基準としてその汚れの存在を推定する。条件判定処理22では、ACC制御ECU2に接続された各種センサ類/各種ECU等3の情報を入力して、水分条件、地域条件を判定する。レーダ汚れ判定処理23では、レーダ検知処理21で汚れの存在を推定した場合でも、水分条件、地域条件が成立しない場合には、異常と判定せず、レーダ検知処理21の時間のカウントをリセットする。
(もっと読む)
レーダ装置制御方法、レーダ装置、移動体および送受信装置
【課題】他の移動体の相対向きを算出することができるレーダ装置制御方法、レーダ装置、移動体および送受信装置を提供すること。
【解決手段】移動体の所定の位置に設置された複数の送受信部が、移動体番号と設置位置番号とを含む信号を送信し、他の移動体に設置された複数の送受信部から送信される信号を受信した場合に、信号を受信した受信部、信号を送信した他の移動体、信号を送信した送信部が設置されている位置を特定することにより、他の移動体の相対向きを算出する。
(もっと読む)
速度測定装置
【課題】 小型で、安価で、消費電力が少なく、ヘッドスピードとボールスピードの双方の測定結果を安定的かつ比較的正確に得ることができる速度測定装置を提供すること
【解決手段】 ドップラー信号を出力するドップラーセンサ11と、ドップラーセンサによって出力されたドップラー信号を基準と比較して二値化するコンパレータ12と、コンパレータの出力に基づいてヘッドスピードを算出する第一マイクロコントローラ14と、ドップラー信号に基づきFFTによりボールスピードを求める第二マイクロコントローラ17と、を備える。さらに、第一マイクロコントローラは、ゴルフクラブのスイングの有無を判別する機能を備え、スイングがあったと判別された場合に、ドップラー信号の蓄積を開始し、FFT処理を行うようにした。
(もっと読む)
地雷探知装置及び地雷探知システム
【課題】誤検知及び見落としを防止し、迅速に地雷探知を実行することができる地雷探知システムを提供する。
【解決手段】地雷探知システム1は、地雷が埋設されている可能性のある地雷探知エリア30をA方向及びB方向に走査して探知する地雷探知装置10と、地雷探知装置10から送信される情報を受信して解析及び表示するパーソナルコンピュータ(PC)20とを有する。地雷探知装置10の地雷探知部100は、金属探知機と、地中レーダーと、匂いセンサと、赤外線カメラと、アンテナに接続されてPC20と無線通信する通信部と、各部の動作を制御する制御部と、制御部により制御されて車輪110を駆動する車輪駆動部と、制御部により制御されて駆動して地雷探知部100をガイド120上で移動させるガイド駆動部とを有する。
(もっと読む)
1 - 20 / 41
[ Back to top ]