
Fターム[5J070BG30]の内容
レーダ方式及びその細部 (42,132) | 表示 (572) | 補助情報表示 (155) | 航跡 (49)
Fターム[5J070BG30]に分類される特許
21 - 40 / 49
管制塔用表示装置、該管制塔用表示装置に用いられる航空機表示方法及び表示制御プログラム
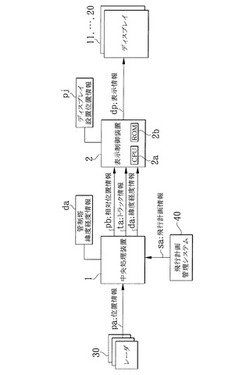
【課題】管制官が表示画面を注視しているときでも、周辺空域に対して目視による監視を行うことができる管制塔用表示装置を提供する。
【解決手段】レーダ30から管制塔の周辺空域を飛行する航空機の位置情報paが取得され、位置情報paに基づいて、航空機の位置から管制塔の中心に向う直線と同管制塔の壁面又は窓面とが交わる交差位置がディスプレイに表示される。この場合、位置情報pa及び管制塔の緯度経度情報daに基づいて、管制塔の中心に対する航空機の相対位置情報pbが算出される。緯度経度情報da及び各ディスプレイの設置位置情報pjに基づいて、同各ディスプレイで表示可能な周辺空域の領域を表すウインドウ情報が算出され、かつ、相対位置情報pbが示す航空機の位置する領域を含むウインドウ情報に対応するディスプレイに、上記交差位置が所定のシンボルマークで表示される。
(もっと読む)
同一航跡判定装置

【課題】仮説生成前に同一性を判定できる見込みを推定し、見込みのあるものに対してのみ計算を実行することにより、計算機資源を有効利用し、単位時間に多くの相関結果を出力することができる同一航跡判定装置を得る。
【解決手段】従来の同一航跡判定装置の尤度算出部9に仮説生成判定部10を取りつけ、仮説生成判定部10が、仮説生成を行う前に信頼度の大きな仮説を2つ事前に抽出し、仮説が絞り込めないときに抽出した仮説の比が一定値以上となることを利用して仮説生成の有無を判定し、仮説が絞り込める可能性のある場合には、仮説生成部11に仮説の生成を行わせ、仮説が絞り込める可能性がない場合には、仮説生成部11に仮説の生成を行わせない。
(もっと読む)
聴覚的な表示のための装置及び方法
複数のスピーカー(220)が、該スピーカー(220)をさまざまに駆動することによって異なる空間的位置を聴覚によって示すことができるように空間的に異なる位置に配置されている再現空間(210)において、物体(200)の位置を聴覚的に表示するための装置(100)が、信号関連付け手段(110)と、スピーカー駆動手段(120)とを備えている。信号関連付け手段(110)は物体(200)に聴覚信号を関連付けるように構成されている。スピーカー駆動手段(120)は複数のスピーカー(220)のための1又は2以上のスピーカー信号(LS)を生成するように構成されており、物体(200)の位置を表示するための1又は2以上のスピーカー信号(LS)は、信号関連付け手段(110)によって物体(200)へと関連付けられた聴覚信号にもとづく。1又は2以上のスピーカー信号(LS)を再生したときに再現空間(210)内に物体(200)の位置が聴覚的に表示されるように1又は2以上のスピーカー信号(LS)を生成することができる。 (もっと読む)
追尾装置
【課題】追尾の初期段階から予測誤差を少なくして、安定した目標の追尾を行う。
【解決手段】新たに観測された目標に対して使用するフィルタゲインの初期値を設定する初期化ゲイン設定部6と、観測値に基づく目標の追尾が初期段階である場合に、観測値に基づき目標が到達すると予測される位置を示す第1予測値を算出するとともに、観測値に基づき第1平滑値を算出し、第1平滑値を含む相関のある目標に対する航跡情報を生成する初期化処理部4aと、観測値に基づく目標の追尾が初期段階でない場合に、目標の過去の航跡情報に基づき目標が到達すると予測される位置を示す第2予測値を算出するとともに、第1予測値又は第2予測値と観測値とに基づき第2平滑値を算出し、第2平滑値を含む相関のある目標に対する航跡情報を生成するフィルタリング処理部3と、第1予測値又は第2予測値と観測値とに基づき目標の相関を判断する相関処理部1とを備える。
(もっと読む)
目標観測レーダ装置及び目標追尾方法
【課題】平行移動による観測予報値の補正に代わる補正方式を提供する。
【解決手段】観測した目標物の軌道データに基づいて観測予報値を作成する観測計画作成処理部と、前記観測計画作成処理部からの前記観測予報値に基づいて、目標物を観測した軌道データに含まれるデータ誤差と、目標物固有の軌道の不安定要素とを含んだ誤差値を考慮した2以上の軌道モデルを求め、前記目標物を初期捕捉した観測データに近似した軌道データを前記軌道データから抽出し、前記抽出した軌道データの観測予報値を目標物の追尾観測データとして出力する観測実行計画処理部と、を有する。
(もっと読む)
航跡統合装置及びプログラム及び航跡統合方法
【課題】センサが目標を観測した観測データに基づいて推定した目標の航跡を表わす複数のセンサ航跡データを統合して、精度の高い統合航跡データを生成する。
【解決手段】航跡入力部210は、複数のセンサ航跡データ510を入力する。航跡精度算出部260は、航跡入力部210が入力したセンサ航跡データ510に基づいて、航跡精度評価値を算出する。航跡精度評価値は、センサ航跡データの精度を表わす。重み付け算出部270は、航跡精度算出部260が算出した航跡精度評価値に基づいて、航跡調整係数を算出する。航跡調整係数は、センサ航跡データの重み付けを表わす。統合航跡生成部280は、重み付け算出部270が算出した航跡調整係数に基づいて、センサ航跡データを統合し、統合航跡データ580を生成する。
(もっと読む)
目標追尾装置、目標追尾プログラム及び目標追尾方法
【課題】高分解能センサにより同一目標から複数の検出位置を得るセンサシステムにおいて、検出位置の重心位置精度劣化の低減を図るとともに、目標の航跡の高精度化を目的とする。
【解決手段】検出情報決定部120は、複数の検出装置から取得した検出情報の内、1つの検出装置から取得した検出情報に基づき目標の追尾を行うか、あるいは2つ以上の検出装置から取得した検出情報に基づき目標の追尾を行うかを所定の条件に基づき選択する。また、検出情報決定部120は、選択した結果に基づき、目標の追尾に使用する検出情報を決定する。追尾処理部140は、決定された検出情報に基づき目標を追尾する。
(もっと読む)
レーダ情報表示装置
【課題】航空機等の目標の3次元位置を、その動態を含めて定量性を維持しつつ視覚的に認識することのできるレーダ情報表示装置を得る。
【解決手段】走査毎に取得される目標の3次元の位置情報を時間経過とともに更新しながら順次蓄積記憶する。一方、これら目標の位置情報を3次元表示するための表示画面として、2種の画面、すなわちPPI表示画面と、距離軸をこのPPI表示画面の所定の直径方向に対応付けた距離対高度の表示画面とを用いるとともに、対応付けたPPI直径の方向に関連づけてこれら2種の表示画面を隣接させて配置したレーダ情報表示画面を生成する。そして、このレーダ情報表示画面に目標を表示するにあたっては、蓄積記憶された位置情報の中から最新の走査までの所定の複数走査回数分の位置情報対象に、これら位置情報をシンボル化して上記のレーダ情報表示画面内に一括表示し、目標のトレイルを描く。
(もっと読む)
レーダ装置および類似装置
【課題】この発明の目的は、自船近傍であっても航跡記憶・表示の禁止を必要な領域でのみ行い、それ以外の領域では、レーダ映像と航跡とを同時に記憶・表示することができるレーダ装置および類似装置を提供することにある。
【解決手段】スイープ毎に受信データXのレベルに基づいて物標の有無を示す航跡用データWを生成する航跡用データ生成手段と、前記受信データXのレベルに基づいて航跡記憶禁止領域を設定する航跡記憶禁止領域設定手段と、前記航跡記憶禁止領域外で且つ物標有りの航跡用データWを検出した場合にのみ所定レベルからなる航跡記憶用データYを生成する航跡記憶用データ生成手段と、前記航跡記憶用データYを前記スイープの少なくとも一回転毎に更新記憶した航跡画像データを生成する航跡画像データ生成手段と、前記航跡画像データを読み出して表示する表示手段と、を備えることを特徴とする。
(もっと読む)
レーダ装置および類似装置
【課題】指定した領域の航跡映像のみを消去し、追尾対象や検出対象の航跡映像はそのまま残して、目標の追尾や検出を効率よく行う。
【解決手段】消去領域の大きさが書き込まれた小容量のメモリを、消去動作時に消去タイミング発生部のXカウント値とYカウント値をアドレスとして読み出し、消去領域のテンプレートとして使用する。高速消去を可能とすることで小さなテンプレートでも消去指定位置を移動することにより、大きな領域を消去することが可能である。
(もっと読む)
多目標追尾装置
【課題】従来の多目標追尾装置は、レーダから得た目標の位置情報のみに基づいて目標航跡の相関仮説を生成して行うために、複数の目標の航跡が接近する等複雑な航跡を有する場合には、誤った相関結果を導く可能性が高く、誤追尾が生じやすいという課題があった。本発明は、より信頼度が高い目標追尾が可能な多目標追尾装置を得ることを目的とする。
【解決手段】仮説照合部18は、位置情報追尾処理部4が目標の位置情報から生成した目標航跡を含む仮説群と、目標識別追尾処理部13が目標の位置情報と目標の識別情報から生成した角度航跡との類似度を計算することにより、前記仮説群に含まれる仮説の取捨選択を行う。これにより、誤った相関結果を導く可能性を低くし、より信頼度が高く、正確な相関決定ができる。
(もっと読む)
追尾装置
【課題】高い追尾性能を得ることができ、しかも、多目標を追尾する場合であっても処理負荷を低減することができる追尾装置。
【解決手段】座標系を指定する座標系制御部6と、入力された観測値の座標系を、座標系制御部から指定された座標系に座標変換する観測値用座標変換部1aと、座標系制御部から指定された座標系において、観測値用座標変換部で座標変換することにより得られた観測値と追尾している目標の航跡との相関をとる相関処理部2aと、相関処理部で相関がとられた結果に対して、座標系制御部によって指定された座標系において、フィルタリング処理を実施するフィルタリング処理部4aとを備え、座標系制御部6は、観測値用座標変換部に入力される観測値に応じて、観測値用座標変換部、相関処理部およびフィルタリング処理部で使用する座標系を該追尾装置の運用中に切り換え制御する。
(もっと読む)
航跡表示機能付レーダ装置
【課題】監視対象の目標の航跡上を監視対象でない他の目標の航跡が横切る場合であっても、監視対象の航跡を正確に表示する。
【解決手段】航跡表示機能付レーダ装置10では、目標のレーダエコー中、他の目標である船舶Bを航跡非表示目標指定部40によって指定し、航跡マスクデータ作成部42によって、船舶Bのレーダエコーに基づいて船舶Bの位置及び大きさを算出し、船舶Bの航跡描画をマスクする航跡マスクデータMを作成し、航跡描画処理部44で前記目標のレーダエコーと航跡マスクデータMの論理積を行い、船舶Sの航跡Wbのみを航跡用メモリ26に描画する。その結果、監視対象の目標である船舶Sの航跡Wbを監視対象でない船舶Bが横切る場合であっても、船舶Sの航跡Wsを正確に表示することができる。
(もっと読む)
システム航跡測定装置および航跡割当・航跡誤差補正処理方法
【課題】複数のセンサから得られる複数のセンサ航跡を用いて、正確な、センサ航跡の航跡誤差推定、航跡割当およびシステム航跡を生成する。
【解決手段】ローカル航跡とリモート航跡のペアで航跡の組合せを作成し、各組合せの航跡ペアの差分を取って、組合せごとに算出したペアの差分の2乗和の最小値を1つ選択し、その最小値に対応する組合せを航跡割当とし、またペアの差分の2乗の頻度分布の最頻値の中から航跡バイアス誤差分散を算出する航跡割当処理部と、ローカル航跡とリモート航跡の航跡ランダム誤差分散と、航跡バイアス誤差分散に基づいて航跡バイアス誤差を算出する航跡誤差推定処理部と、航跡バイアス誤差分に基づいて補正した補正したリモート航跡とローカル航跡を重み付け統合してシステム航跡を生成する航跡統合処理部を備える。
(もっと読む)
無線ローカリゼイション装置および方法
デバイスのロケーションは、別のデバイスに対して決定されることができる。例えば、ロケーティングデバイス(102)は、それがターゲットデバイス(104)に対して少なくとも1つの距離を測定するとき、動くことができる。ロケーティングデバイスは、そのあと、測定された単数の距離あるいは複数の距離に関連する1以上のインジケーションを生成することができる。ロケーティングデバイスは、さらに、ターゲットデバイスに対する1以上の決定された方向を関連づける1以上のインジケーションを生成することができる。ターゲットデバイスは、ターゲットデバイスのロケーションを決定するために、あらかじめ決定された方法で、動くことができる。デバイスの各々は、ロケーション決定オペレーションのために、単一のトランシーバ(208、212)および単一のアンテナ(210、214)を使用することができる。 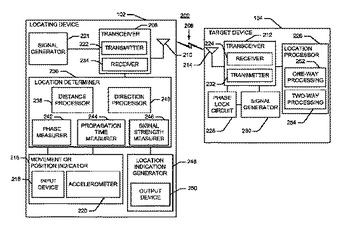 (もっと読む)
(もっと読む)
相手船動静監視装置
【課題】 Bスコープ座標で示される相手船妨害ゾーンの映像と平面座標で示されるレーダ映像との関係が容易に理解できるようにする。
【解決手段】
相手船妨害ゾーンを示す船舶航行支援装置の表示画面1とレーダ装置の表示画面9とは近接して配置される。それらの画面1,9は、VRMとEBLとにより相互に連動するようにされている。
(もっと読む)
ミリ波レーダによる道路交通監視装置
【課題】ミリ波レーダにより走行車両を計測し車線数、各車線幅、中央分離帯幅などを自動的に判断しながら車両交通量を監視する道路交通監視装置を提供する。
【解決手段】ミリ波レーダ2によりミリ波ビーム7を照射し反射波受信により複数の走行車両の検出を行う。照射角、反射までの時間、ドップラーシフトの関係から、ミリ波レーダ2からの距離、方向角度、速度等を算出し、車両の走行軌跡を求め、走行車両数と車線幅方向の関係をグラフ化してグループ分けを行い、グラフの山から車線数を抽出し、グラフの山と両脇の谷から車線幅を抽出する。走行軌跡の速度成分方向が正から負に切り替わる境界部分の中央分離帯の幅を求める。以上で得られた道路配置に基づき車両交通量の計測と監視を行う。
(もっと読む)
多目標追尾装置
【課題】従来の多目標追尾装置は、N次元の相関を毎サンプリング毎に求めるため演算負荷が大きく、また許容可能な時間で解導出を繰り返しても閾値条件を満たす準最適解を得ることができず、尤度の低い相関解しか得られないことがある。
【解決手段】センサの観測回数が設定値の整数倍か否か判別し、整数倍以外のときは、2次元相関算出部で観測値と既追尾航跡の相関を取り、新たな航跡を生成・出力し、整数倍のときは、コスト行列更新部で観測値からコスト行列を1サンプリング毎に更新しながら算出し、Lagrange乗数設定部でコスト行列に基づきLagrange緩和法により求められたLagrange乗数によってLagrange緩和解算出部で緩和された制約条件下で相関解を計算し、実現可能解算出部でこの緩和解を修正して全ての制約条件を満たす解を求め、新たな航跡を生成・出力する。
(もっと読む)
移動航跡表示装置
【課題】移動航跡表示装置において、レーダ航跡を物標の大きさに関わらず且つ所要の時点で細線化して表示する。また、細線化された航跡表示を、所定の条件に従って、直線化して表示及びデータ蓄積を可能とすること。
【解決手段】原航跡情報を、細線化航跡情報に変換して表示することにより、同じ領域(海域)で複数の船舶等が漁を行っている場合などにも、表示画面の該当エリアがレーダ航跡での塗りつぶしを無くす。また、細線化航跡情報を、さらに直線化航跡情報に変換することにより、表示画面上の航跡表示をよりシンプルに表現できる。また、直線化航跡情報は、抽出化直線をその始点と終点の位置を表す数値データに変換して、保存する。
(もっと読む)
目標追尾装置
【課題】予め設けられた目標の運動に即した運動モデルの複数の追尾フィルタを並列に処理する多重運動モデル方式において、状況に応じて使用する追尾フィルタ数を変化させて高精度追尾を可能にする。
【解決手段】追尾フィルタから得られる目標の運動の状況を表す値に基づいて、当該値に対応する追尾フィルタを切り離すか、組み込むかを判断し、判断結果に基づいた制御信号を生成するファイル選択制御手段と、生成された制御信号に基づいて、対応する追尾フィルタの切り離しまたは組み込みを行うスイッチ手段とを備える。
(もっと読む)
21 - 40 / 49
[ Back to top ]