
Fターム[5J083AB13]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 用途 (922) | 衝突防止 (295)
Fターム[5J083AB13]に分類される特許
1 - 20 / 295
超音波センサ及びその製造方法
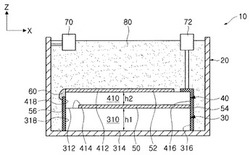
【課題】温度による超音波センサの性能偏差を減少させると共に、簡単に製作できる超音波センサ及びその製造方法を提供する
【解決手段】超音波センサ10は、温度補償のためのキャパシタが一体化された超音波センサ10であり、圧電振動素子30と、上記圧電振動素子30に一体形成されるキャパシタ40と、を含む。
(もっと読む)
車両用障害物検知装置

【課題】地面による反射波の影響を受けにくい車両用障害物検知装置を提供する。
【解決手段】車両用障害物検知装置は、超音波を送受波するセンサ1と、センサ1に超音波を送波させるとともに、センサ1が受波した反射波の振幅と閾値とを比較することにより障害物の有無を判断するコントローラ2とを備える。コントローラ2は、センサ1による送波からの時間を計時するタイマ26と、タイマ26が計時する時間に応じて閾値を設定する閾値設定部27とを備える。閾値設定部27は、地面9からの反射波を考慮しない場合の閾値に、検知期間を開始する時刻における地面9からの反射波の影響を除去するための補正値を加えた閾値を設定し、障害物の有無を判断する検知期間内においてタイマ26の計時する時間が経過するにつれて段階的に閾値を小さく設定する。
(もっと読む)
超音波送受信器
【課題】従来のシリコーンクッションの代わりに、底面をもつ多重筒形状の樹脂成形品にシリコーンを充填した振動吸収体を使用する場合、樹脂成形品が肉薄であるために飛び石によって振動吸収体が破壊され、意匠性を悪化させる可能性がある。飛び石による振動吸収体の破壊を防止する。
【解決手段】バンパーカバー7と超音波送受信器に振動吸収体4を取り付けた状態で、振動吸収体4の意匠面の高さがバンパーカバー7と超音波送受信器の意匠面1aの高さよりも低くし、さらにバンパーカバー7の意匠面側の開口部をしぼり形状にすることでバンパーカバー7と超音波送受信器の間の幅Lを調整し、振動吸収体4の意匠面にあたる飛び石の大きさを振動吸収体4が破壊されないレベルまで小さくする。
(もっと読む)
車両用障害物検知装置
【課題】電源からセンサに供給される電圧が変動する場合であっても、障害物を検知する距離を比較的大きくとることを可能にする。
【解決手段】車両用障害物検知装置は、超音波を送受波するセンサ1と、センサ1に超音波を送波させるとともに、センサ1が受波した反射波の振幅と閾値とを比較することにより障害物の有無を判断するコントローラ2とを備える。コントローラ2は、電源電圧を検出する電圧監視部26を備え、電圧監視部26が検出した電源電圧が低いほど閾値を小さく設定する。
(もっと読む)
超音波センサ
【課題】 断線の発生箇所の特定が容易な超音波センサを提供する。
【解決手段】 圧電素子11と、圧電素子11に並列に接続された共振回路122とを備える。圧電素子11は、制御部24に制御された送信部21から共振回路122を介して入力される駆動信号により駆動される。まず、駆動信号の周波数を所定の第1駆動周波数とするとともに共振回路122側からの入力に基いて断線の有無を判定する第1判定動作が行われる。この第1判定動作において断線があると判定された場合には、駆動信号の周波数を第1駆動周波数よりも共振回路122単体の共振周波数に近い第2駆動周波数とするとともに、共振回路122側からの入力に基いて、断線が共振回路122の前段側と後段側とのいずれにあるかを判定する第2判定動作が行われる。第2判定動作により、断線の発生箇所の特定が容易となるから、修理が比較的に容易となる。
(もっと読む)
超音波センサ
【課題】超音波センサにおいて、自装置の異常を判別して、障害物に関する正確な情報を得る。
【解決手段】送波駆動回路が、振動子の共振周波数とは異なる周波数f1で振動子を駆動する(S11)。この結果、検知ゲート時間内に、受波増幅回路から受波信号が入力されたときに(S12でYES)、この受波信号の周波数が、共振周波数f0と同じである場合に限り(S13でYES)、超音波センサが異常と判定される(S14)。ここで、周波数f1で振動子を駆動したときに、検知ゲート時間内に共振周波数f0の受波信号が入力された場合、その受波信号は、残響信号とみなせる。そして、検知ゲート時間内に残響信号が入力されたということは、超音波センサに、振動子に寄生する振動部が生じていることに起因する異常が発生していることを意味する。従って、S11〜S14のような処理を行うことにより、超音波センサが異常であるか否かを正確に判別できる。
(もっと読む)
メッシュ型空間解析技法を利用した駐車空間探知方法及びそのシステム
【課題】空間認知過程で発生する情報歪曲現象を解消できるメッシュ型空間解析技法を利用した駐車空間探知方法及びそのシステムを提供する。
【解決手段】本発明は、所定の制御信号に応じて超音波信号を発信する送信部と、前記送信部から発信された信号が物体に突き当たって戻る反響信号を受信する受信部と、前記送信部により超音波が走査される駐車予定空間に対して仮想の領域を設定し、当該領域を所定間隔のセル(cell)で分割したメッシュ型空間イメージをデータに格納するメッシュ型空間設定部と、前記反響信号を解析して前記メッシュ型空間設定部により設定されたメッシュ型分割領域に対して非障害物領域を確定する非障害物領域判定部と、前記非障害物領域判定部により確定された非障害物領域を除外させ、最終的な空間分析結果を算出するコントローラとを含んでなることを特徴とする。
(もっと読む)
障害物検知装置
【課題】障害物検知装置において、障害物までの距離を正確に検知できるようにする。
【解決手段】障害物検知装置1は、超音波を送受信する複数の超音波センサ2と、複数の超音波センサから2の超音波の送信を制御する制御部5と、複数の超音波センサ2の受信信号に基いて、障害物を検知し、障害物までの距離を計測する距離演算部4とを備える。制御部5は、距離演算部4により計測された障害物までの距離が所定の距離より遠い場合、又は、距離演算部4により障害物が検知されない場合に、複数の超音波センサから同じタイミングで超音波を送信する動作を繰り返す同時送信動作を行わせる制御を行う。これにより、全ての超音波センサ2は、他の超音波センサ2からの直接波の受信完了後に、障害物からの反射波を受信することになる。従って、超音波センサ2からの直接波の影響を受けることなく、障害物を検知することができる。
(もっと読む)
物体検知装置
【課題】応答性が低下することを抑制できる物体検知装置を提供する。
【解決手段】通信線53を介して通信可能に設けられたマスタ装置10とスレーブ装置20,30,40とを備えた物体検知装置である。スレーブ装置20,30,40は、マスタ装置10からの指示に応じて、車両の周辺に検知波を送波し、この検知波が物体によって反射してきた反射波を受波するとともに、反射波に基づいて物体を識別するための複数の情報を測定する。そして、スレーブ装置20,30,40は、測定された複数の情報のうち、マスタ装置10から指示された情報のみを物体を識別するための情報として含む測定結果を送信する。マスタ装置10は、スレーブ装置20,30,40に対して、検知波の送波を指示するとともに、送信させる情報を指示する。
(もっと読む)
音源検出装置
【課題】誤検出を低減させ、検出性能を向上させることが可能な接近車両検出装置を提供する。
【解決手段】集音器13,14,15,16により集音された音に基づいて所定の音源を検出する音源検出装置であって、集音された音信号から雑音を抽出する雑音抽出部21と、集音された音信号から雑音抽出部21により抽出された雑音の信号成分を抑制する雑音抑制部22とを備え、音源検出部24が雑音抑制後の音の情報を用いて接近車両等、所定の音源の位置を検出する。このように、音源検出装置は、雑音の信号成分を抑制した音を基に必要な所定の音源の位置を検出するため、雑音の影響を予め排除し、必要な音源のみを検出することができる。
(もっと読む)
車両用障害物検出システム
【課題】路面の凹凸を障害物として誤検知してしまうことを抑制できる車両用障害物検出システムを提供することを目的とする。
【解決手段】車両の前方側面部に設置された第一側面部センサと、前記車両の後方側面部であって、車両の左右の側面のうち前記第一側面部センサと同じ側面に設置された第二側面部センサと、障害物検出手段とを有し、第二側面部センサにより障害物を検出するための閾値を、第一側面部センサの反射波に基づいて設定することによって、自車の後側方の検出範囲に存在する障害物を精度よくユーザーに報知することが可能となる。
(もっと読む)
障害物検知装置
【課題】超音波ソナーの音圧を測定することなく、超音波ソナーの感度の補正を行うことが可能な障害物検知装置を提供する。
【解決手段】2つの超音波ソナー2a、2bは、受信モードが設定されたときに、送受信モードが設定された超音波ソナーの記憶媒体14に記憶された受信ゲインを取得し、当該受信ゲインと自分自身の記憶媒体14に記憶された受信ゲインとから補正値を求める。そして、この補正値に基づいて自分自身の受信ゲインを調整することにより、受信モードが設定された超音波ソナーの感度と送受信モードが設定された超音波ソナーの感度とを等しくする。こうして、超音波ソナーの音圧を測定する工程を追加することなく、超音波ソナーの感度の補正を行うことができる。
(もっと読む)
車両用物体形状認識装置
【課題】一つの超音波発信器と二つの超音波受信器を用いて、システムの低コスト化を図りつつ、精度よく物体の形状を推定する。
【解決手段】車両用物体形状認識装置1は、超音波を発信する発信部2と超音波を受信する二つの受信部3,4とを有し、超音波照射範囲を横断した扇状の水平面の中心線近辺の中心対象線上と、扇状の水平面の自車両進行方向の左側臨界線近辺の左側対象線および右側臨界線近辺の右側対象線のうち、いずれか一方の対象線上とに、超音波センサによる自車両からの検出距離に基づき、超音波センサによる自車両から物体までの距離を示す距離点を設定する設定手段と、自車両の移動に伴って、設定手段により繰り返し設定された距離点を繋ぎ合わせて物体の形状を認識する認識手段とを備えることにより精度よく物体の形状を認識する。
(もっと読む)
超音波センサ
【課題】一部の部品の交換のみで、マイクロフォン突出長さを変更可能にする。
【解決手段】マイクロフォン1とケース3とを連結する連結部材5は、マイクロフォン1を保持する保持筒部51と、ケース3と嵌合される嵌合筒部52と、保持筒部51と嵌合筒部52との間に形成された中間筒部53とを備える。これによると、連結部材5における中間筒部53の長さL1を変えるのみで、すなわち、連結部材5の交換のみで、マイクロフォン突出長さL2を変更することができる。
(もっと読む)
車両用物体認識装置
【課題】指向性の低い超音波センサを用いても、複雑な形状を有する物体の形状認識の精度を高めることができる車両用物体形状認識装置を提供する。
【解決手段】車両用物体形状認識装置1の物体形状推定部8により、物体の位置を示す距離点を超音波センサ2,3による検出距離で、照射範囲を横断した扇状の水平面の自車両の前方側臨界線近辺の対象線上の検出点および後方側臨界線近辺の対象線上の検出点のうち少なくともいずれかに設定し、自車両の移動に伴い繰り返し検出される検出距離のうち、超音波センサ2,3による自車両からの距離を検出する時刻およびその所定時間だけ前後の時刻における検出距離に基づき、各時刻の検出距離が自車両に近づくときは距離点を前方側の検出点に設定し、遠ざかるときは後方側の検出点に設定し、設定された距離点を繋ぎ合わせた形状を物体の形状と認識する。
(もっと読む)
絶対速度推定装置
【課題】速度出力のためのデータを所得した時間にずれが存在しても、検出対象物の絶対速度を正確に推定することができる絶対速度推定装置を提供する。
【解決手段】取得したデータから対象物Tの相対速度Ttを出力する相対速度出力手段104と、センサ13〜15から出力されるデータから自車両1の絶対速度Vmを出力する自車速度出力手段105と、手段104,105が同期して出力した相対速度Vt及び自車速度Vmを求めるためにそれぞれ利用したデータを取得した時間の推定ずれ量Dを取得するずれ量取得手段106と、推定ずれ量Dだけ時間をずらせて相対速度Vsに自車速度Vmを加算して求めた対象物Tの推定絶対速度Vを出力する絶対速度推定手段107とを備える。ずれ量取得手段106は、複数の対象物Tiのうち、各対象物Tiの相対速度Vtiと自車速度Vmとの差が0となる対象物Tiの数が最大となるずれ量dを、推定ずれ量Dとして取得する。
(もっと読む)
スイングドア自動開扉装置
【課題】従来のレーザセンサだけで障害物を検出していた発明では、表面に鏡面を有する障害物に対して、距離算出誤差が生じる可能性があった。これに対し本発明は、表面が鏡面である障害物に対しても、障害物までの距離検出精度の向上が可能なドア自動開扉装置を提供することを目的とする。
【解決手段】レーザとソナーの二つのセンサを組み合わせて用いて検出することで、高精度に、表面が鏡面となっている障害物にスイングドアが接触してしまうことを回避することができる。また、ソナーによる障害物検出結果を優先してスイングドアの開扉を決定することで、鏡面を有した障害物を障害物として検出した結果を必ず反映できるため、障害物への接触を避けることができる。
(もっと読む)
車両用物体認識装置
【課題】超音波センサの照射範囲内の複数方向に検出点を設定し、それらの点から正確に位置が検出された点を抽出することで、超音波センサを用いた物体形状認識の精度を向上させるとともに、これに伴うコストの低減を図る。
【解決手段】超音波センサを用いて物体の形状を認識する車両用物体認識装置1において、物体形状推定部8により、円錐状に広がる所定の照射範囲を横断した扇状の水平面の少なくとも一方側および他方側臨界線近辺の対象線のうち、超音波センサ2,3による自車両からの検出距離で、一方側および他方側対象線上それぞれに検出点を設定し、自車両の移動に伴って繰り返し設定された各検出点それぞれを繋ぎ合わせて物体上の検出点軌跡を生成し、生成された検出点軌跡それぞれに基づいて検出範囲を形成し、形成した各検出範囲の重複部分を物体の形状と認識する。
(もっと読む)
物体検出装置
【課題】複数の超音波物体検出部により障害物検出を行う場合の、検出タイミングのばらつきを抑制する。
【解決手段】バンパ部11の長手方向の全域をカバーするように互いの間隔が略均等に配置された4つの超音波物体検出部CRL,CNL,CNR,CRRを駆動する際、左右何れか一端、例えば、左端の超音波物体検出部から中央に向かって順に駆動する。次に右端の超音波物体検出部から中央に向かって順に駆動する。つまり、超音波物体検出部CRL,CNL,CRR,CNRの順に駆動する。超音波物体検出部CNLおよびCNRはそれぞれ左端側から駆動した場合および右端側から駆動した場合の最後、つまり2番目に駆動されるため、走行車線の中央部付近の障害物検出は、超音波物体検出部CNLとCNRとにより、定周期で行われることになる。
(もっと読む)
障害物検出装置
【課題】従来の障害物の位置を求める開口合成法は距離画像の画像処理で濃度勾配を求め勾配方向から障害物の大まかな傾き角度を推定できるが距離画像はボケが大きいため、求めた傾き角度には大きな誤差が含まれる。
【解決手段】複数個の超音波センサの中の1個から信号発信部で生成された超音波信号を発信し、障害物から反射され、複数個の超音波センサが得た超音波信号を信号受信部で受信・記憶し、この受信超音波信号から障害物位置検出部で障害物位置を特定し、各超音波センサの受信信号中から障害物からの反射波を特定して、超音波センサ間での反射波の信号強度の比率を求め、障害物と超音波センサと障害物の角度をパラメータとして、各超音波センサで得られる障害物からの反射波の信号強度比が格納された信号強度比角度算出テーブルを参照して障害物の角度を求める信号強度比角度推定部を備える。
(もっと読む)
1 - 20 / 295
[ Back to top ]