
Fターム[5J083AD04]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 測定量 (1,723) | 距離 (553)
Fターム[5J083AD04]の下位に属するFターム
Fターム[5J083AD04]に分類される特許
1 - 20 / 474
超音波センサ
海中ネットワーク管理システム、及び海中ネットワーク管理方法、移動体装置
超音波センサ及びその製造方法
【課題】温度による超音波センサの性能偏差を減少させると共に、簡単に製作できる超音波センサ及びその製造方法を提供する
【解決手段】超音波センサ10は、温度補償のためのキャパシタが一体化された超音波センサ10であり、圧電振動素子30と、上記圧電振動素子30に一体形成されるキャパシタ40と、を含む。
(もっと読む)
超音波センサシステム

【課題】コストを抑えつつ検知エリア内における対象物の位置を検出することのできる超音波センサシステムを提供する。
【解決手段】対象物に向けて所定の周期で超音波を送波し且つ反射波を受波するマイクロホン10と、マイクロホン10で送受波する超音波を電気信号に変換する信号処理部11とを有する超音波センサ1と、超音波センサ1で得られた電気信号に基づいて対象物の位置を検出する制御装置2とを備え、制御装置2は、超音波センサ1での超音波の送受波に基づいて対象物との間の距離である検出距離を所定の周期で演算する演算部20と、少なくとも1周期前の検出距離の情報を記憶する記憶部21とを有し、演算部20は、対象物と並行に移動している状態において、現在の超音波センサ1と対象物との間の現在の検出距離X2の情報と、1周期前の超音波センサ1と対象物との間の過去の検出距離X1の情報とから対象物の位置を検出する。
(もっと読む)
車両位置検出装置
【課題】本発明は、簡単な構成で精度良く車両の位置を検出する車両位置検出装置の提供を目的とする。
【解決手段】本発明の車両位置検出装置は、GPS電波による自車位置の測定を補助するための車両位置検出装置であって、車両に設置され、当該車両の上方における地物を感知する突起物センサー12と、道路上方の地物についての予めの調査結果に基づく情報を位置情報と紐付けた突起物位置情報を取得する突起物位置情報取得手段16と、突起物センサー12の感知結果と突起物位置情報との比較に基づき、車両の位置を検出する車両位置検出手段17と、を備える。
(もっと読む)
キーレスシステム
【課題】多数の車内アンテナや車外アンテナを必要とせず、より低コストにより近傍領域判定および車内外領域判定を実施することが可能なキーレスシステムを提供する。
【解決手段】車載機は電波を放射する第1のアンテナと、音波を放射するスピーカと、車とユーザの距離を算出する制御部とを備え、携帯機は第1のアンテナにより放射された電波を受信する第2のアンテナと、スピーカにより放射された音波を受信するマイクとを備え、車載機の制御部は第2のアンテナが第1のアンテナにより放射された電波を受信した電波受信時間およびマイクがスピーカにより放射された音波を受信した音波受信時間とに基づき車とユーザの距離を算出し、算出した車とユーザの距離に基づき携帯機が車内領域、車外近傍領域または車から離れた領域のいずれにあるかを判定するように構成したので、必要な部品数を減らすことが可能となる。
(もっと読む)
超音波発生デバイスおよび超音波発生装置
【課題】 残響特性に優れた超音波発生デバイスを提供する。
【解決手段】 超音波発生デバイス100は、駆動信号が印加されることにより、振動して超音波を発生させる圧電振動子1を備え、圧電振動子1に印加される駆動信号は、圧電振動子1の共振周波数をfr、駆動パルス数をnp、駆動パルスの周波数をfpで表したとき、次の式を満たす。
0.98・fr/(1+1/np)≦fp≦1.02・fr/(1+1/np)
(もっと読む)
ナビゲーション端末及びその位置の取得方法
【課題】設備コストを抑え且つ所定精度を確保して端末の位置を取得できるようにする。
【解決手段】ランドマーク距離決定部3はランドマークLMkからの測位信号で端末1との間の距離を決定し、代表位置設定部4はマップ情報より、ランドマークを中心とし決定距離に等しい円上にあり、且つ端末1が移動可能な通路区画上にある位置から、端末1の候補位置としての代表位置を設定する。自律航法位置推定部6は自律航法によりランドマークから移動してきた端末1の位置を推定する。端末位置補正部7は、推定位置と代表位置とに基づく補正処理により、端末1の位置を取得する。
(もっと読む)
障害物検知装置
【課題】障害物検知装置において、障害物までの距離を正確に検知できるようにする。
【解決手段】障害物検知装置1は、超音波を送受信する複数の超音波センサ2と、複数の超音波センサから2の超音波の送信を制御する制御部5と、複数の超音波センサ2の受信信号に基いて、障害物を検知し、障害物までの距離を計測する距離演算部4とを備える。制御部5は、距離演算部4により計測された障害物までの距離が所定の距離より遠い場合、又は、距離演算部4により障害物が検知されない場合に、複数の超音波センサから同じタイミングで超音波を送信する動作を繰り返す同時送信動作を行わせる制御を行う。これにより、全ての超音波センサ2は、他の超音波センサ2からの直接波の受信完了後に、障害物からの反射波を受信することになる。従って、超音波センサ2からの直接波の影響を受けることなく、障害物を検知することができる。
(もっと読む)
超音波センサ
【課題】送信用と受信用の両ホーンを離間させずに回折波の影響による検出精度の低下を抑制することができる超音波センサを提供する。
【解決手段】超音波センサの送信素子3や受信素子9に取り付ける送信用ホーン5や受信用ホーン7として、超音波Uや反射波Rの伝播方向Xに、超音波Uの波長λの4分の1(λ/4)の寸法差ΔLhがある2つの音響ホーン体41,43を有するホーン筐体40を用いた。そして、送信側と受信側との間で逆位相の回折波A1の振幅と回折波A2の振幅とを一致させて、両回折波A1,A2を、受信素子9の手前の、スクリーン45で音響ホーン体41,43毎に仕切られていないホーン筐体40の共有音響空間47において相殺させる構成とした。
(もっと読む)
超音波距離画像生成装置
【課題】従来は、1.異なるセンサ位置で対象物からの反射波を受信、又はセンサ数を増し対象物からの反射波だけを同期加算して信号強度を強め、相対的に虚像を小さくする。2.伝搬距離や指向性に応じて、重みを切り替える。1は測定点数の増加、又は装置規模が大きくなり、2は未知の物体には有効でない可能性がある。
【解決手段】夫々異なる位置で受信した対象物からの複数の反射波から対象物までの距離と受信強度を夫々の反射波毎に複数の距離・強度算出手段で算出し、複数の反射波の受信強度比を用いて別途定められた基準値との類似度を判定し類似性の低い、距離・強度算出手段で算出された距離に応じた点の受信強度にセンサ強度制御手段で修正を加え、開口合成手段で距離と修正受信強度から開口合成した距離画像からさらに虚像を削減する。
(もっと読む)
多重検知装置及びその方法
【課題】多数の超音波センサーが互いに異なる送信周波数を使用するようにして単一の分析集積回路を使用できるようにした多重検知装置及びその方法を提供する。
【解決手段】該当送信周波数の超音波信号を発信する送波部110と、送波部110から発信した超音波信号を受信して出力する受波部130を備えた多数の超音波センサー100と、多数の超音波センサー100の各送波部110に対して該当送信周波数の超音波信号を発信するように制御し、各受波部130から出力した超音波反射信号を受信して発信時間と受信時間との時間差を利用して超音波センサー100が検知した物体の距離を計算して出力する分析集積回路200と、を含む。
(もっと読む)
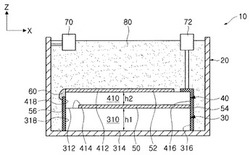
超音波センサ及びその製造方法
【課題】半田付け作業による工程を減らし、量産化及び自動化が可能な超音波センサ及びその製造方法を提供する。
【解決手段】底面を有する筒状のケース12と、ケース12の底面に形成される圧電素子16と、ケース12の開口部に圧入固定され、溝を備えている吸音材18と、前記溝に挿入固定される温度補償用キャパシタ20と、吸音材18の溝を貫通し、温度補償用キャパシタ20の一電極と圧電素子16の露出された電極に接続される第1のピン端子22aと、吸音材18の溝に挿入固定され、温度補償用キャパシタ20の他電極に接続される第2のピン端子22bと、吸音材18の溝に挿入固定され、一端子は第2のピン端子22bと接続され、他端子はケース12の内壁に接続されるリード線24と、を含む。
(もっと読む)
距離検出システム
【課題】測定側機器からの発呼信号とこれに対応する応答機器からの応答信号とにそれぞれ特徴を持たせることによって、応答機器までの距離の算出を可能とする。
【解決手段】測定側機器1Aは、測定側特徴量が連続的に変化する発呼信号を送信する測定側送信部11と、応答側機器から送信されてくる応答信号を受信する測定側受信部12と、受信した応答信号の応答側特徴量を解析する特徴量解析部13と、発呼信号を送信したタイミングから一定時間を計測するタイマー部14と、応答側機器から受信した応答信号の応答側特徴量の解析結果に基づいて、一定時間経過後に測定側機器1Aと応答側機器との間の距離を算出する距離算出部15と、応答側機器の応答側特徴量記憶部に記憶されている応答側特徴量を記憶する測定側特徴量記憶部16と、を備えている。
(もっと読む)
被検体情報取得装置、被検体情報取得方法、及びプログラム
【課題】 FDI法及び適応型信号処理を用いて処理した場合、反射波形と参照信号との間で波形のずれが生じると画像が劣化する可能性がある。
【解決手段】 本発明の被検体情報取得装置は、弾性波を受信して複数の受信信号に変換するための複数の変換素子と、被検体内の対象物の形状に対応する複数の参照信号を記憶する記憶手段と、前記複数の受信信号と、前記複数の参照信号のうち少なくとも2つ以上の参照信号と、を用いて、周波数領域干渉計法及び適応型信号処理を行い、前記2つ以上の参照信号毎の電力強度分布を取得するFDI適応処理手段と、を有することを特徴とする。
(もっと読む)
車両用距離センサ
【課題】取付けが容易で、かつ車両のバンパに取り付けられた状態で確実に保持される車両用距離センサを提供することである。
【解決手段】センサ本体42、ケース体46、ベゼル43及びリテーナ44を備える超音波センサ3(距離センサ)において、リテーナ44の爪部55を構成する一対の爪部単体57にストッパ部62を設ける。ケース体46のコネクタ部65の側からバンパ2,4の取付孔54に挿入された超音波センサ3は、リテーナ44の部分が取付孔54を通過するときに一対の爪部単体57を弾性変形させる。そして、取付孔54を通過した状態で一対の爪部単体57が弾性復元するとともに、ストッパ部62が取付孔54の出口側の内周縁54bに引っ掛かる。
(もっと読む)
被検体情報取得装置、被検体情報取得方法、及びプログラム
【課題】 FDI法ならびに適応型信号処理を用いて処理した場合、走査線の隣接間で連続性が乏しい部分が生じる可能性がある。
【解決手段】 本発明の被検体情報取得装置は、被検体からの弾性波を受信し複数の受信信号に変換するための複数の変換素子と、前記複数の受信信号を用いて整相加算処理を行い、複数の走査線信号を出力する整相加算手段と、前記複数の走査線信号を隣接する走査線間で加算して複数の合成走査線信号を出力する走査線信号合成手段と、前記複数の合成走査線信号を用いて周波数領域干渉計法及び適応型信号処理を行い、電力強度分布を取得するFDI適応処理手段と、を有する。
(もっと読む)
位置計測装置及びその方法
【課題】環境ノイズが大きなレベルの調査環境下であっても、遮蔽物内の被計測対象の特定位置を前記遮蔽物外から探査する装置を提供する。
【解決手段】遮蔽物内の被計測対象100の特定位置を遮蔽物外から計測する場合に、被計測対象100の特定位置に電磁波及び音響波を定期的に同時に発信する発信装置200を装着し、遮蔽物外に配置される探査装置300にて、発信装置200からの電磁波を受信すると共に互い異なる複数の位置で音響波を受信してそれぞれの受信結果から被計測対象100の特定位置を探査する。探査装置300は、電磁波が受信されてから複数の位置でそれぞれ音響波が受信されるまでの時間を計測し、時間計測結果から電磁波と音響波との速度差に基づいて複数の音響波受信位置における発信装置200との相対距離を求め、複数の音響波受信位置における発信装置200との相対距離に基づいて発信装置200の相対位置を特定する。
(もっと読む)
車載用物体判別装置
【課題】安価な超音波センサを用いて、自車両周辺の物体が移動物体か静止物体かを判別することができる車載用物体判別装置を提供する。
【解決手段】自車両の左、右側面の前後に配列された第1、第2、第3、第4超音波センサ2,3,4,5のうちいずれかを基準超音波センサとして、自車両の移動に伴って繰り返し得られる基準超音波センサの検出結果を、基準超音波センサから基準超音波センサを除く他の対象超音波センサまでの距離と自車両の車速とに基づき算出される所定時間分だけ移動させたものと、自車両の移動に伴って繰り返し得られる対象超音波センサの検出結果とを車載用物体判別装置1の移動物体除去部10により照合し、この照合結果におけるずれの有無に基づいて物体が移動物体か静止物体かを判別する。
(もっと読む)
車両用物体認識装置
【課題】指向性の低い超音波センサを用いても、複雑な形状を有する物体の形状認識の精度を高めることができる車両用物体形状認識装置を提供する。
【解決手段】車両用物体形状認識装置1の物体形状推定部8により、物体の位置を示す距離点を超音波センサ2,3による検出距離で、照射範囲を横断した扇状の水平面の自車両の前方側臨界線近辺の対象線上の検出点および後方側臨界線近辺の対象線上の検出点のうち少なくともいずれかに設定し、自車両の移動に伴い繰り返し検出される検出距離のうち、超音波センサ2,3による自車両からの距離を検出する時刻およびその所定時間だけ前後の時刻における検出距離に基づき、各時刻の検出距離が自車両に近づくときは距離点を前方側の検出点に設定し、遠ざかるときは後方側の検出点に設定し、設定された距離点を繋ぎ合わせた形状を物体の形状と認識する。
(もっと読む)
1 - 20 / 474
[ Back to top ]