
Fターム[5J083AD13]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 測定量 (1,723) | 物体の形状 (137)
Fターム[5J083AD13]の下位に属するFターム
路面の状況 (4)
Fターム[5J083AD13]に分類される特許
1 - 20 / 133
車両位置検出装置
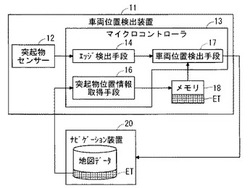
【課題】本発明は、簡単な構成で精度良く車両の位置を検出する車両位置検出装置の提供を目的とする。
【解決手段】本発明の車両位置検出装置は、GPS電波による自車位置の測定を補助するための車両位置検出装置であって、車両に設置され、当該車両の上方における地物を感知する突起物センサー12と、道路上方の地物についての予めの調査結果に基づく情報を位置情報と紐付けた突起物位置情報を取得する突起物位置情報取得手段16と、突起物センサー12の感知結果と突起物位置情報との比較に基づき、車両の位置を検出する車両位置検出手段17と、を備える。
(もっと読む)
超音波格子化3次元電子化撮像装置

【課題】周波数ごとに異なる方向に超音波を掃引照射する1次元配列の送波器による3次元撮像方式は知られている。しかし、この方法によると、2次元収束音響レンズが必要となり、2次元収束音響レンズは重量物となるため、装置の簡易化に困難を感じている。
【解決手段】本発明は、周波数により一次元方向を走査する構成において、単一位相板あるいは反転位相板を使用することにより、1次元配列の送波器と1次元配列の受波器による、重量物となる2次元収束音響レンズを必要としない簡便な3次元撮像方式を提供する。
(もっと読む)
被検体情報取得装置、被検体情報取得方法、及びプログラム
【課題】 FDI法及び適応型信号処理を用いて処理した場合、反射波形と参照信号との間で波形のずれが生じると画像が劣化する可能性がある。
【解決手段】 本発明の被検体情報取得装置は、弾性波を受信して複数の受信信号に変換するための複数の変換素子と、被検体内の対象物の形状に対応する複数の参照信号を記憶する記憶手段と、前記複数の受信信号と、前記複数の参照信号のうち少なくとも2つ以上の参照信号と、を用いて、周波数領域干渉計法及び適応型信号処理を行い、前記2つ以上の参照信号毎の電力強度分布を取得するFDI適応処理手段と、を有することを特徴とする。
(もっと読む)
車両用物体形状認識装置
【課題】一つの超音波発信器と二つの超音波受信器を用いて、システムの低コスト化を図りつつ、精度よく物体の形状を推定する。
【解決手段】車両用物体形状認識装置1は、超音波を発信する発信部2と超音波を受信する二つの受信部3,4とを有し、超音波照射範囲を横断した扇状の水平面の中心線近辺の中心対象線上と、扇状の水平面の自車両進行方向の左側臨界線近辺の左側対象線および右側臨界線近辺の右側対象線のうち、いずれか一方の対象線上とに、超音波センサによる自車両からの検出距離に基づき、超音波センサによる自車両から物体までの距離を示す距離点を設定する設定手段と、自車両の移動に伴って、設定手段により繰り返し設定された距離点を繋ぎ合わせて物体の形状を認識する認識手段とを備えることにより精度よく物体の形状を認識する。
(もっと読む)
映像取得装置
【課題】焦点位置以外であっても方位分解能が優れ、水の濁度や照度に関わらず広い視野の映像を取得することができる映像取得装置を提供する。
【解決手段】方位方向に周波数の異なる超音波を送波する送波器と、前記送波器から送波された超音波の対象物からの反射波を受波する受波器と、を備える映像取得装置において、前記送波器と前記対象物の間に、前記反射波を収束させる可動音響レンズを備える。
(もっと読む)
車両用物体認識装置
【課題】指向性の低い超音波センサを用いても、複雑な形状を有する物体の形状認識の精度を高めることができる車両用物体形状認識装置を提供する。
【解決手段】車両用物体形状認識装置1の物体形状推定部8により、物体の位置を示す距離点を超音波センサ2,3による検出距離で、照射範囲を横断した扇状の水平面の自車両の前方側臨界線近辺の対象線上の検出点および後方側臨界線近辺の対象線上の検出点のうち少なくともいずれかに設定し、自車両の移動に伴い繰り返し検出される検出距離のうち、超音波センサ2,3による自車両からの距離を検出する時刻およびその所定時間だけ前後の時刻における検出距離に基づき、各時刻の検出距離が自車両に近づくときは距離点を前方側の検出点に設定し、遠ざかるときは後方側の検出点に設定し、設定された距離点を繋ぎ合わせた形状を物体の形状と認識する。
(もっと読む)
車両用物体認識装置
【課題】超音波センサの照射範囲内の複数方向に検出点を設定し、それらの点から正確に位置が検出された点を抽出することで、超音波センサを用いた物体形状認識の精度を向上させるとともに、これに伴うコストの低減を図る。
【解決手段】超音波センサを用いて物体の形状を認識する車両用物体認識装置1において、物体形状推定部8により、円錐状に広がる所定の照射範囲を横断した扇状の水平面の少なくとも一方側および他方側臨界線近辺の対象線のうち、超音波センサ2,3による自車両からの検出距離で、一方側および他方側対象線上それぞれに検出点を設定し、自車両の移動に伴って繰り返し設定された各検出点それぞれを繋ぎ合わせて物体上の検出点軌跡を生成し、生成された検出点軌跡それぞれに基づいて検出範囲を形成し、形成した各検出範囲の重複部分を物体の形状と認識する。
(もっと読む)
障害物検出装置
【課題】従来の障害物の位置を求める開口合成法は距離画像の画像処理で濃度勾配を求め勾配方向から障害物の大まかな傾き角度を推定できるが距離画像はボケが大きいため、求めた傾き角度には大きな誤差が含まれる。
【解決手段】複数個の超音波センサの中の1個から信号発信部で生成された超音波信号を発信し、障害物から反射され、複数個の超音波センサが得た超音波信号を信号受信部で受信・記憶し、この受信超音波信号から障害物位置検出部で障害物位置を特定し、各超音波センサの受信信号中から障害物からの反射波を特定して、超音波センサ間での反射波の信号強度の比率を求め、障害物と超音波センサと障害物の角度をパラメータとして、各超音波センサで得られる障害物からの反射波の信号強度比が格納された信号強度比角度算出テーブルを参照して障害物の角度を求める信号強度比角度推定部を備える。
(もっと読む)
駐車空間検出装置
【課題】従来とは異なる新規な方法で、精度よく障害物間のスペースの長さを検出することを目的とする。
【解決手段】距離センサによって測定された距離およびその時点における距離センサの位置を繰り返し測定し、測定された距離およびセンサ位置をそれぞれ半径および中心とする検出円を算出し、各検出円上に駐車車両の輪郭点を算出するため、連続する2つの検出円C1、C2の共通外接線Tを算出し、検出円C2と共通外接線Tの接点を輪郭点とし、このように算出された各輪郭点に基づいて、駐車車両の端部を算出する。
(もっと読む)
薄膜トランジスタバックプレーンを用いた超音波撮像
【課題】撮像に必要な高分解能を提供するために、コヒーレント超音波二次元(2D)アレイの開口寸法が大きくなってきている。焦点調節のために個々の画素間で複雑な時間的調節を必要で、高速かつ高精度なエレクトロニクスを必要とするため、この技術を大面積アレイに拡張するのは困難であったが、TFT技術により受信回路を含んだ大口径アレイを提供する。
【解決手段】受信器アレイが、送信信号に対応する受信信号の同相成分および直交成分を検出するために基板上に複数の受信器要素を有している。受信器要素のそれぞれは受信器トランスデューサと薄膜トランジスタ(TFT)受信回路とを含んでいる。TFT受信回路は受信信号と複数の受信器要素全体にわたって分散された合成バイアス信号内の基準信号とを混合するための混合器を有する直交検出器を含んでいる。送信器は複数の受信器要素に音響的に接続され、撮像媒体を通じて送信信号を生成する。
(もっと読む)
水底下物体の探査類別方法
【課題】探査と類別の計測時間を短縮可能な水底下物体の探査類別方法を提供する。
【解決手段】予め、形状や材質の異なる複数の既知の水底下物体21を用い、水中航走体2を既知の水底下物体21の周りで直線状あるいは曲線状に航行させたときの散乱波のレベルパターンを作成してデータベースとして蓄積しておき、水中航走体2を、測定対象の水域で直線状あるいは曲線状に航行させつつ、送波器3から音波を送波して散乱波の計測を行うと共に、水中航走体2を、測定対象の水域で格子状に縦横に航行させて、測定対象の水域中の任意の測定点に対して散乱波の計測を行うようにし、計測した散乱波の強度から水底下物体21を検知すると共に、計測した散乱波の強度を基に散乱波のレベルパターンを作成し、当該散乱波のレベルパターンをデータベースと照合することで、水底下物体21の類別を行う。
(もっと読む)
水中目標物検出装置、該検出装置に用いられる目標物検出方法及び目標物検出プログラム
【課題】水中目標物検出装置での目標物のアスペクト及び方位、全長の推定精度を向上させる。
【解決手段】発振器31から送波器32に駆動信号adが与えられ、音波パルスapが送波される。受波器33により、音波パルスapが目標物20に到達したときの反射波の直接波df,de及びマルチパス波mf,meが合わせて受波されて受信信号wrが出力される。受波指向性合成部34により、受信信号wrが入力され、目標物20を指向するように受波ビームが指向性合成されて合成受信信号trが出力される。マルチパス補正部35により、合成受信信号trから、予め保持されているマルチパス波受信信号の時間幅を特定する情報を基にマルチパス波受信信号が除去され、直接波df,deに対応する直接波受信信号drが出力される。相関処理部36により、直接波受信信号drに基づいて、位相の相異なる直接波受信信号dr同士の相関値が算出されて目標物20が検出される。
(もっと読む)
超音波映像の画質を改善させる超音波システムおよび方法
【課題】超音波映像の画質を改善させる超音波システムおよび方法を提供すること。
【解決手段】本発明における超音波システムは、少なくとも1つの超音波映像に対応する超音波データを取得する超音波データ取得部と、少なくとも1つの集束点を基準に深さによる超音波ビームの拡散程度を示す少なくとも1つのビームプロファイルを格納するための格納部と、前記少なくとも1つのビームプロファイルに基づいて前記深さによる前記超音波ビームの拡散に対応するブラーリング量を設定し、前記超音波データおよび前記ブラーリング量に基づいて前記超音波ビームの拡散によるブラーリングを補正するためのフィルタリング処理を行って前記少なくとも1つの超音波映像の画質を改善させるプロセッサとを備える。
(もっと読む)
無人の水中航走体および無人の水中航走体を運転するための方法
【課題】水中の対象物の構造および輪郭を可能な限り迅速にかつ正確に検出することができるようにする。
【解決手段】無人の水中航走体1であって、少なくとも1つのセンサユニット7が設けられており、該センサユニット7によって、水中航走体1の周辺における対象物のセンサ情報8が獲得可能である。少なくとも1つのセンサユニット7が、水中航走体1の長手方向軸線14に対して接線方向の水中航走体1の接線方向12に可動に配置されているかまたは長手方向軸線14に対して平行に延びる軸線に対して接線方向の水中航走体1の接線方向12に可動に配置されていて、センサ情報8が設定可能である位置決め装置13によって接線方向12において位置決め可能である。
(もっと読む)
水中構造物点検システム及び画像処理装置
【課題】水中構造物の点検の作業効率を向上し、コストを抑制できる水中構造物点検システム及び画像処理装置を提供する。
【解決手段】造影された映像において船舶が移動することで生じる歪みを補正するため、当該海域で予め測定された音速と、映像に生じている歪みの大きさとに基づいて船舶の移動速度を推定し、当該推定した移動速度を用いて映像の歪みを補正し、当該補正された映像を出力する。
(もっと読む)
物体の判別方法及び物体の判別装置
【課題】処理が複雑になることなく、被写体の領域を正確に判別することが可能な物体の判別方法及び物体の判別装置を提供する。
【解決手段】所定空間中に、幅を有する第1領域1と第2領域2とを備えた被写体3の第1領域1と第2領域2とを判別する物体の判別方法である。空間のイメージ画像17を取得する画像取得工程と、イメージ画像17を第1領域対応部11と第2領域対応部12とを有する2値化画像15を生成する2値化画像生成工程と、2値化画像15の収縮処理を行って、2値化画像15から第2領域対応部12を消滅させる収縮工程と、収縮処理を行った後に第1領域対応部11の膨張処理を行って処理画像16を作成する膨張工程とを備える。膨張処理を行った後に抽出された領域を第1領域1とするとともに、膨張処理を行った後の処理画像と収縮処理を行う前の2値化画像15との差分を第2領域2とする。
(もっと読む)
超音波探傷試験体の表面形状の同定方法並びに同定プログラム、開口合成処理プログラム及びフェーズドアレイ探傷プログラム
【課題】超音波を試験体に入射させたときの表面からの反射波を利用して試験体の表面形状を把握可能とする。
【解決手段】表面形状が変化した形状変化部を有する試験体の表面に、前記試験体の表面形状に沿って形態を変化させうる媒質を介してフェーズドアレイを配置し、前記フェーズドアレイの各振動子毎に超音波を試験体に向けて射出させて表面エコーを受信し、各振動子毎に取得された前記試験体の表面からの反射波を検出して各振動子から前記試験体の表面までのビーム路程を求めると共に、各振動子を中心とし各振動子毎に求まるビーム路程を半径とする円を想定し、隣り合う振動子を中心とする前記円の共通外接線を求め、前記共通外接線が求まる区間では前記共通外接線上の点を二次補間したものを試験体表面と同定し、前記共通外接線が求まらない区間ではそれら振動子間を形状変化の境界と判断して、各区間で得られた共通外接線上の点を二次補間し、これを外挿して前記境界における表面形状として同定し、試験体表面形状を求めるようにしている。
(もっと読む)
フェイズドアレイ合成開口ソナーシステム
【課題】ソナー画像の精度を上げつつ、処理速度を落とさないことを目的とする。
【解決手段】プラットフォーム12に複数設置されている受信素子31から入力された受信データを、同時に受信したデータ毎に複数のフェイズドアレイ処理装置9に分散するフェイズドアレイ振分装置8と、受信データに対するフェイズドアレイ処理を並列に行なう複数のフェイズドアレイ処理装置9と、複数のフェイズドアレイ処理装置9から出力されたフェイズドアレイ処理結果を、受信データの受信順に合成開口処理装置11へ送るデータシェーピングバッファ装置10と、送られた複数のフェイズドアレイ処理結果を用いて合成開口処理を行なう合成開口処理装置11と、を有することを特徴とする。
(もっと読む)
障害物検出装置
【課題】外部からの情報の取得を不要とすることで簡易な構成としながらも、障害物の形状及び移動体と障害物との相対位置を適切に特定する。
【解決手段】障害物検出装置1は、方位が零でないと判定し、距離変化量の絶対値が第1の所定値以上であり且つ方位変化量の絶対値が第2の所定値以下であると判定すると、障害物が平面形状物体であり、車両と障害物の平面とが斜めの相対位置であると特定し、一方、距離変化量の絶対値が第1の所定値以上でない又は方位変化量の絶対値が第2の所定値以下でないと判定すると、障害物が非平面形状物体であり、その障害物の方位が零でないと特定する。
(もっと読む)
音波測定センサ
【課題】サイドローブが低減されるクロスファンビーム方式の音波測定センサを提供する。
【解決手段】音波測定センサは、送波器1,1と、受波器2,2とを有し、これらが互いに直交するように配置されたクロスファンビーム方式で構成されている。送波器1,1と受波器2,2との交差箇所は、送波受波複合器3Bとして構成されている。送波受波複合器3Bは、各送波用振動子1sが送波器1,1の長手方向に不欠落となるように配列され、かつ、各受波用振動子2rが受波器2,2の長手方向に不欠落となるように配列されて構成されている。
(もっと読む)
1 - 20 / 133
[ Back to top ]