
Fターム[5J083AE03]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 測定対象 (1,034) | 水中移動体 (180)
Fターム[5J083AE03]の下位に属するFターム
魚 (117)
Fターム[5J083AE03]に分類される特許
1 - 20 / 63
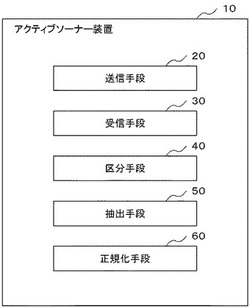
アクティブソーナー装置、アクティブソーナー装置における信号正規化方法およびそのプログラム
【課題】
強い海底反射波などが入ってきた場合においても、エコー信号のS/Nの低下を抑制することができる、アクティブソーナー装置、アクティブソーナー装置における信号正規化方法およびそのプログラムを提供する。
【解決手段】
本発明のアクティブソーナー装置10は、所定時間長さを有するエコー信号を生成し、音波として送信する送信手段20と、目標物から反射されたエコー信号を含む反射波を受信信号として受信する受信手段30と、受信信号を所定方向に切り出し、切り出した区間内に含まれる信号を複数セルに分割する区分手段40と、区間内においてセル内に含まれる信号のレベル順にセルを並びかえ、エコー信号の長さに対応する範囲に位置するセル内の信号を抽出する抽出手段50と、抽出した信号を用いて正規化する正規化手段60と、を備える。
(もっと読む)
音響画像生成システム、音響画像生成方法、および音響画像生成プログラム

【課題】検知した水中音波に基づき水中目標物の正確な位置を示す音響画像を生成するシステムを提供する。
【解決手段】水中の反射音を捕捉する音響センサ部5とこの反射音に基づき水中の物体の位置を示す音響画像を生成する画像データ生成部とを備え、反響音の水平方向の指向性を示すビームを合成する指向性合成部10と、反射音を捕捉した受信時刻と各反響音ビームの指向性に基づき船舶からの方位および距離として特定される各地点における反響音のレベルを導出する信号強度導出部11と、各位置情報に対応して導出した異なる反響音のレベルを積分して得た値に色情報を割り当てて表示する表示器14を備えた。
(もっと読む)
周波数検出方法及び装置
【課題】所望の周波数分解能力を維持しながらフーリエ変換におけるサンプリング周波数を低くしてサンプル数を少なくし、複素乗算回数を減らす。
【解決手段】周波数fcを含む所定の周波数帯域幅Δfp内で受信信号の周波数解析を行う装置は、受信信号の周波数変換を行う変調器3と、変調器3の出力に接続したアナログフィルタ4と、アナログフィルタ4の出力をオーバーサンプリングでデジタル信号に変換するA/D変換器6と、A/D変換器6の出力から周波数帯域幅Δfpに相当する成分を抽出するデジタルBPF(バンドパスフィルタ)7と、周波数ゼロからΔfpに相当する帯域幅内に配置されるように、デジタルBPF7から出力される信号をダウンサンプリングするダウンサンプリング部8と、ダウンサンプリング部8の出力に対して高速フーリエ変換を行うFFT処理部9とを備える。
(もっと読む)
アクティブソーナー装置及びその信号処理方法
【課題】アクティブソーナー装置において、目標をより確実に検出できるようにする。
【解決手段】アクティブソーナー装置における信号処理方法は、第1の時間幅を有する音波信号を媒質に送波することと、媒質を伝播してきた音波信号を受波音波信号として受波することと、受波音波信号の時間軸を第1の時間幅よりも短い第2の時間幅で区切ったものをそれぞれ時間セルとして、各時間セルごとに、受波音波信号の到来方位と強度とを求めることと、各時間セルごとに、その時間セルを含む複数の連続する時間セル内での到来方位の方位集中度を算出し、その時間セルでの強度に方位集中度を重み付けしたものを検出値とすることと、を有する。
(もっと読む)
アクティブソーナー装置及びその信号検出方法
【課題】アクティブソーナー装置において、移動速度が小さな目標物であっても残響等から分離して確実に検出できるようにする。
【解決手段】音響信号を受波信号として受波することと、受波信号に対して周波数解析を行うことと、検出における単位周波数幅及び単位時間幅の領域をセルとして、周波数解析の結果に基づきセルごとに受波信号の到来方位と強度とを求めることと、強度が第1のしきい値を超えているセルが周波数方向または時間方向に隣接する場合に、その隣接するセルにおける到来方位の差が第2のしきい値以内かどうかを判定し、第2のしきい値以内である場合に、隣接するセルを1つの検出として連結することと、実行する。
(もっと読む)
物体検出支援システム、制御方法、及びプログラム
【課題】送信器から発せられる検出波による物体の検出を支援すること。
【解決手段】設定部110と、送信レベル取得部120と、設定部110に保持されている送信器510及び受信器の各位置情報に基づいて、伝播損失を受信器から見た方位と距離の関数で表す伝播損失関数として算出する伝播損失関数推定部130と、設定部110に保持されている物体情報の物体について、外部のデータベース600から当該物体のターゲットストレングスを抽出するターゲットストレングス取得部140と、送信レベル取得部120が取得した送信レベル情報と、伝播損失関数推定部130が算出した伝播損失関数と、ターゲットストレングス取得部140が抽出したターゲットストレングスとに基づいて、信号レベルを受信器からの方位と距離の関数で表す検出信号レベル関数を求め、外部の表示手段700に表示させる検出信号レベル関数推定部150とを備える。
(もっと読む)
残響フィルタ、アクティブソーナー装置、残響除去方法及び残響除去プログラム
【課題】 反射波から残響を高精度に除去できる残響フィルタ等を提供する。
【解決手段】 残響フィルタ10は、反射波のレベルLがレベル閾値Lthを越えたか否かを検出する反射波検出手段101と、反射波のレベルLがレベル閾値Lthを越えたことを反射波検出手段101が検出した場合に、反射波のレベルLがレベル閾値Lthを越え続ける継続時間Tを計測する継続時間計測手段102と、継続時間計測手段102で計測された継続時間Tが継続時間閾値Tthを越えたか否かを検出し、継続時間Tが継続時間閾値Tthを越えた反射波を残響であると判定し、継続時間Tが継続時間閾値Tthを越えない反射波を目標エコーであると判定する目標エコー判定手段103と、を備えたことを特徴とする。
(もっと読む)
ソーナーシステム、送信装置、受信装置、ソーナー用目標物特定方法、及びそのプログラム
【課題】目標物からの反射音がドップラー付でも目標物の正確な位置を特定すること。
【解決手段】扇状の送波ファンビーム音を目標物に向けて送受信信する送波器20及び受波器30と、反射音の受信方位を受波器30に設定する受信方位設定部34と、反射音から目標物を特定する受信信号処理手段37とを有する。送波器20及び受波器30は相互に90°ずらして設置。又各送波素子用の励振信号を生成する生成回路部22を備え、この励振信号を一定周期のバルク波とし、このバルク波を異なった周波数の二以上の単位励振信号が並んだ周波数ホッピング信号dで構成、目標物からの反射受信信号を方位毎に特定するサンプルホールド回路39と、このサンプルホールドされた反射受信信号を成す複数の単位励振信号を対象としてドップラーシフトされた複数のレプリカ信号で相関をとるレプリカ相関部40と、その結果を画像表示用として記憶する記憶部とを備えたこと。
(もっと読む)
水中物体捜索計画立案支援方法およびその装置
【課題】水中物体がとり得るあらゆる回避行動パターンを想定した上で、水中物体を効率良く捜索する捜索計画を立案すること。
【解決手段】本発明は、海洋内に潜在する水中物体を捜索する捜索計画の立案を支援する、水中物体捜索計画立案支援装置が行う水中物体捜索計画立案支援方法に適用される。本方法は、前記水中物体の複数の回避行動パターンと、前記複数の回避行動パターンの各々の発生確率と、を記憶部に設定する設定ステップと、捜索領域内に前記水中物体が一様に分布する状態を初期状態として、前記発生確率に応じた回避行動パターンに従って前記水中物体を回避行動させるシミュレーションを開始するシミュレーションステップと、シミュレーション後における前記捜索領域内の前記水中物体の存在分布を表示部に表示する表示ステップと、を有する。
(もっと読む)
船舶用ソナードームおよび船舶用ソナー装置
【課題】効率よく製造でき、また、剥がれる可能性もなく、送受波器の性能を確保する上で有利なソナードームを提供すること。
【解決手段】ソナードーム16は、音響透過領域22と遮音領域24とを有している。ソナードーム16は、内側部材30と、外側部材32と、それらで挟まれたコア材34とを含んで一体成形されている。内側部材30は、音響の透過を可能とした材料で形成されコア材34を支持するフレームとして機能する。外側部材32は、音響の透過を可能とした材料で形成されコア材34の剥がれを阻止するカバーとして機能する。音響透過領域22を構成するソナードーム16の箇所は、コア材34が、音響の透過を可能とした粘弾性体34Aで構成されている。遮音領域24を構成するソナードーム16の箇所は、コア材34が音響を遮音する(振動雑音の低減を含む)遮音材34Bで構成されている。
(もっと読む)
水中航走体誘導システム、個別航走体水中走行制御方法、及びその制御プログラム
【課題】本発明は、予め設定された目標物に向けて、水中航走行体を有効に音響ホーミングさせるようにした水中航走体誘導システムを提供することにある。
【解決手段】周波数の異なる二つの誘導超音波信号S1,S2に順次案内されて目標物Mに向けて水中航走する一の個別航走体2と、第1,第2の誘導超音波信号S1,S2を発信する主航走体1とを設ける。一方の誘導信号S1は周波数の低い無指向性の超音波が使用され、他方の誘導信号S2は目標物Mに向けて周波数の高い超音波が発信される。そして、前述した一の個別航走体2は、一方の誘導信号S1を受信し且つ受信音圧が高くなる方向に航走する第1の水中航走実行機能と、この誘導信号S1の受信音圧のレベルが基準値以上となった場合に目標物Mからの反射である他方の誘導信号S2に向けてその航走方向を切換えてその方向に水中航走を実行する第2の水中航走実行機能とを備えている。
(もっと読む)
合成開口ソナーのための方法及びシステム
【課題】ソナーアレイの水中での動きに応じて、ソナーアレイの位置及び向きの推定値を与える能力を改善する方法、及びシステムを提供する。
【解決手段】複数のビームフォーム信号間の相関をとることにより、動いているソナーアレイの複数の高精度高度差、及び複数の高精度水平変位を与えるようにしたソナーアレイの位置推定値を改善する方法、及びシステム。
(もっと読む)
水中航走体の航走制御方法及び装置
【課題】 複数の水中航走体に装備する音響スキャンソナーの数を低減させる。
【解決手段】 音響スキャンソナー6を備え、位置表示装置2を搭載して航走できるようにした位置特定用水中航走体1と、位置表示装置2に対する相対位置を検出するための相対位置検出装置8を有する被誘導用水中航走体3を形成する。先ず、位置特定用水中航走体1を航走させて音響スキャンソナー6により海底4の特定位置4aを正確に検出させて、そこに位置表示装置2を設置させる。その後、被誘導用水中航走体3を航走させるときに、相対位置検出装置8により位置表示装置2との相対位置を検出させ、検出された位置表示装置2に向けて航走させることで、被誘導用水中航走体3を海底4の特定位置4aまで正確に到達させる。
(もっと読む)
水中航走体の位置較正方法
【課題】 音響通信が不安定でも位置較正を実施できるようにする。
【解決手段】 水中航走体を、慣性航法位置に累積誤差がなくて精度が高い状態のときに、緯度方向と経度方向の各アップデート用経路22,23に沿って航走させながら、支援船側より音響測位を行い、得られた音響測位位置24aの緯度成分の代表値を緯度方向基準値25、音響測位位置24bの経度成分の代表値を経度方向基準値26とする。その後、慣性航法位置に誤差が累積した水中航走体を、緯度方向と経度方向の各位置アップデート用経路22,23に沿って再び航走させ、この際、支援船側からの音響測位で得られる音響測位位置27aの緯度方向の代表値28、及び、音響測位位置27bの経度方向の代表値29を、緯度方向と経度方向の各基準値25,26と比較して緯度方向と経度方向の偏差δx、δyを求める。この偏差δx,δyにより水中航走体の慣性航法位置を較正させる。
(もっと読む)
水中航走体の位置較正方法及び装置
【課題】 音響通信の速度が限られていても精度よく較正できるようにする。
【解決手段】 水中航走体6を、緯度方向位置検出用経路22と経度方向位置検出用経路23に沿って航走させながら、支援船7側より音響測位を行う。得られた音響測位位置D4の緯度成分と経度成分の代表値D5x,D5yのみを、音響通信を介して水中航走体6の水中航走体制御装置15へ与える。水中航走体制御装置15では、緯度方向と経度方向の各位置検出用経路22,23を航走したときに水中航走体6が自身で計測していた慣性航法位置d4の緯度成分と経度成分の代表値d5x、d5yを求め、これを支援船7側より与えられた音響測位位置D4の緯度成分と経度成分の代表値D5x,D5yより減算して緯度方向と経度方向の偏差δx,δyを求め、この緯度方向と経度方向の偏差δx,δyにより水中航走体6が自身で計測していた慣性航法位置d4を較正させる。
(もっと読む)
水中航走体の位置較正方法
【課題】 慣性航法位置の較正に要する音響測位回数及び水中航走体のエネルギー消費を低減させ、音響測位精度を向上させる。
【解決手段】 水中航走体6を、定点保持又は着底により海底21に対する相対位置変化を停止させる。この状態で、支援船7側からの音響測位を複数回行い、各計測結果における緯度方向の平均と経度方向の平均を求めて、水中航走体6の統計的に正しい緯度と経度を備えた音響測位位置を求める。又、水中航走体6自身による慣性航法に基づく測位を行い、その緯度及び経度について、音響測位位置の緯度及び経度と比較して、緯度方向と経度方向の偏差をそれぞれ求め、求められた緯度方向及び経度方向の偏差により、水中航走体6自身による慣性航法に基づく緯度と経度のデータを較正させる。更に、音響測位時に支援船7を水底付近に停止させた水中航走体6の鉛直線上付近に保持することで音響測位精度を向上させる。
(もっと読む)
水中航走体の位置較正方法
【課題】 音響測位可能な領域が小さくても精度よく位置較正できるようにする。
【解決手段】 音響測位実施可能領域23に、円周状位置検出用経路24を設定する。水中航走体6を、自身で計測する慣性航法位置25に基づいて円周状位置検出用経路24に沿って航走させながら、支援船側より音響測位を行う。次いで、水中航走体6が最も東寄りに位置するときの音響測位位置26の経度成分の代表値27と、慣性航法位置25の経度成分の代表値29から経度方向に関する偏差δxを求め、水中航走体6が最も南寄りに位置するときの音響測位位置26の緯度成分の代表値28と、慣性航法位置25の緯度成分の代表値30から緯度方向の偏差δyを求める。その後、各偏差δx,δyにより水中航走体6が自身で測位する慣性航法位置25を較正させる。
(もっと読む)
水中航走体の位置較正方法
【課題】狭い領域で運用する水中航走体についても、精度よく較正できるようにする。
【解決手段】水槽22内で運用される水中航走体について、水槽22の短辺22aと長辺22bに平行に沿わせて位置検出用経路23aと23bを長く設定する。水中航走体を自身で検出する慣性航法位置を基に各位置検出用経路23aと23bに沿って航走させるときに、支援船側より音響測位を複数回行う。上記各位置検出用経路23aと23bごとに、得られる音響測位位置D4と、慣性航法位置について、それぞれ直交する方向の代表値を求め、求められた両代表値の差として、各位置検出用経路23a,23bに直交する方向に関する慣性航法位置の偏差δxとδyをそれぞれ求め、この偏差δx,δyにより水中航走体が自身で測位する慣性航法位置を較正させる。
(もっと読む)
整相システム、整相装置及び整相プログラム
【課題】変形したえい航型ラインアレイの形状を推定することができ、推定したえい航型ラインアレイの形状から指向性を補償した整相処理を行なうことができるようにする。
【解決手段】本発明の整相システムは、複数の受波器及びセンサを備えるラインアレイと、整相装置とを備え、整相装置が、センサからのセンサ情報及びえい航体の方位情報に基づいて、ラインアレイ上の複数の疑似的な位置から出力されたとみなす複数の疑似センサ出力情報を生成する疑似出力生成手段と、複数の疑似センサ出力情報及び複数の疑似的な位置に基づきラインアレイの形状を推定し、この推定したラインアレイ上での複数の受波器の位置を求めるラインアレイ形状推定手段と、複数の受波器からの受波信号に対して、ラインアレイ形状推定手段により求められた対応する受波器の位置で音波を受波したときの遅延時間を付与して受波信号の位相を整相する整相処理手段とを有する。
(もっと読む)
音波測定センサ
【課題】サイドローブが低減されるクロスファンビーム方式の音波測定センサを提供する。
【解決手段】音波測定センサは、送波器1,1と、受波器2,2とを有し、これらが互いに直交するように配置されたクロスファンビーム方式で構成されている。送波器1,1と受波器2,2との交差箇所は、送波受波複合器3Bとして構成されている。送波受波複合器3Bは、各送波用振動子1sが送波器1,1の長手方向に不欠落となるように配列され、かつ、各受波用振動子2rが受波器2,2の長手方向に不欠落となるように配列されて構成されている。
(もっと読む)
1 - 20 / 63
[ Back to top ]