
Fターム[5J083AE04]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 測定対象 (1,034) | 水中移動体 (180) | 魚 (117)
Fターム[5J083AE04]に分類される特許
41 - 60 / 117
スキャニングソナー装置および追尾方法
【課題】目標とする魚群が移動中と見なせる場合には、俯角を変えて能動的に探査して、目標とする魚群の仮定外の移動に対しても追尾を継続し、移動中でないと見なせる場合は、固定俯角で探査して魚群の位置、特徴、周囲の状況を読み取りやすくするスキャニングソナー装置および追尾方法を提供する。
【解決手段】
基準となる俯角で追尾対象を観測して得られた反射波の強度に応じたデータがその範囲の俯角で観測した追尾対象の反射波の強度に応じたデータより同等かそれ以上となる俯角を確定する第1の探査手順と、第1の探査手順で確定された俯角に固定して追尾対象の反射波の強度に応じたデータを観測する第2の探査手順と、現在の探査手順で得られた信号の変化に応じて、次の探査手順を第1または第2の探査手順に設定する探査制御手順と、を含む。
(もっと読む)
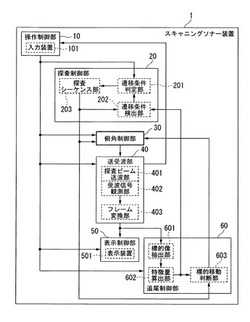
スキャニングソナー装置

【課題】外乱による反射波の強度の揺らぎによる影響を低減し標的の俯角方向に対する移動の向き検出の精度を改善したスキャニングソナー装置を提供する。
【解決手段】スキャニングソナー装置1は、標的像抽出部31と特徴量抽出部32と移動方向判定部33とを具備し、標的像抽出部31が、音波が標的で反射した反射波を受波して得られた反射波の強さを示す複数のサンプリング値から標的の形状を示す標的像を抽出し、特徴量抽出部32が、標的像抽出部が抽出した標的像に含まれるサンプリング値の空間的平均値から標的の特徴量を算出する。標的像抽出部31が、水面に対して複数の異なる俯角に送波された音波それぞれに対して複数の異なる俯角ごとの標的像を抽出し、特徴量抽出部32が、当該複数の標的像それぞれの特徴量を算出し、移動方向判定部33が、算出された複数の特徴量を比較することにより標的の俯角方向に対する移動の向きを判定する。
(もっと読む)
スキャニングソナー装置および追尾方法
【課題】指定した追尾対象の追尾を継続することができるスキャニングソナー装置および追尾方法を提供する。
【解決手段】前回の観測結果において追尾対象とした像の重心の座標の絶対位置を基準位置とし、その周囲に追尾対象が含まれるように設定した領域を第1の観測領域として設定する第1の領域設定手順と、第1の領域設定手順によって設定された第1の観測領域内の基準位置に今回の観測結果による追尾対象の候補が存在するか否かが最初の判断である判断方法により次に追尾対象とする当該候補を設定する追尾対象設定手順と、を含む。
(もっと読む)
探知装置およびその表示制御方法
【課題】記憶部に記憶された画像データの中から、利用者が表示部に表示させたい画像を容易に探すことが可能な探知装置を提供する。
【解決手段】表示部40の表示領域41の全体に、連続する複数の画像を右側から左側に送るように表示させる第1の表示モードと、表示部40の表示領域41を3段に分割して、分割された表示領域41a、41b、および41cに順に、連続する複数の画像を右側から左側に送るように表示させる第2の表示モードとを切り替えることが可能なように構成され、第2の表示モードにおいてカーソル46で選択された画像が、第1の表示モードにおいて拡大されて表示領域41の全体に表示される。
(もっと読む)
魚群探知機
【課題】必要な魚探画像を効率よく記憶して記憶手段の小容量化を図り、低コスト化を図ることができる魚群探知機を提供する。
【解決手段】イベントマークIM1〜IMnの設定時には、使用者が設定操作した任意の位置での自船位置情報とともに魚探画像表示領域14b相当分の魚探画像A2がメモリに記憶され、それを後の再表示時に表示可能な構成とした。これにより、例えば魚探画像A2に魚影Fが現れた自船位置にて使用者がイベントマークIM1〜IMnの設定操作を行うと、その位置情報のメモリへの記憶とともにその位置付近のみの魚探画像A2がメモリに記憶されるため、記憶される個々の魚探画像A2のデータ量は少なくて済む。
(もっと読む)
スキャニングソナーの表示装置、水深表示方法、及び水深表示プログラム
【課題】ユーザの監視負担を増やさずに、ユーザが直感的に探査範囲の水深を把握できるよう、水深を表示するスキャニングソナーの表示装置を提供する。
【解決手段】スキャニングソナーの表示装置が、探信音を受信するためのペンシルビームの軌跡である円錐体表面に沿った傘型の水平断面の探査データを取得し、前記探査データに基づいて画像フレームデータを作成するフレームデータ変換部4と、前記探信音の探査範囲の水深を算出する水深計算部6と、前記水深に応じて同心円で区別される領域を有する前記画像フレームデータの背景画面を作成する背景画面作成部7と、前記画像フレームデータと前記背景画面を重畳し、重畳された画像フレームデータを作成する表示画面作成部5と、前記重畳された画像フレームデータを表示する表示部8と、を備える。
(もっと読む)
超音波探知装置
【課題】振動子の数が少なくても、グレーティングローブによる偽像を除去して探知対象物の検出精度を向上させることが可能な超音波探知装置を提供する。
【解決手段】受信ビーム信号形成部9a,9bで形成された2つの受信ビーム信号の位相差を、位相差算出部11で走査角度ごとに算出し、メインローブ受信信号検出部12は、位相差算出部11で算出された位相差の変化態様に基づいて、各走査角度における受信ビーム信号がメインローブで受信された信号かグレーティングローブで受信された信号かを判定し、メインローブで受信された信号に基づく探知対象物の画像を表示し、グレーティングローブで受信された信号に基づく探知対象物の画像を表示しないように制御する。
(もっと読む)
魚群探知機
【課題】単体魚等の小さな物標からの有用なエコーを損なわずに、他の超音波装置からの干渉を除去できる魚群探知機を提供すること。
【解決手段】干渉除去対象とするデータの深度を含む第1深度範囲に属する今回のデータから求めた第1特徴値と、干渉除去対象とするデータの深度を含む第2深度範囲に属する前回のデータから求めた第2特徴値とを比較し、第1特徴値のほうが小さい場合は干渉除去対象とするデータをそのまま出力し、第2特徴値のほうが小さい場合は干渉除去対象とするデータと同じ深度の前回のデータを出力する干渉除去部を設ける。
(もっと読む)
超音波送受波器
【課題】グレーティングローブの発生を抑制して、より広いチルト角の範囲内で正確な角度情報を得ることが可能になると共に、振動子の数を増大させることなく、容易に製造することができる。
【解決手段】超音波送受波器10の送受波器本体12を逆円錐台形状とすることで、グレーティングローブの発生する角度範囲を水平方向から鉛直方向(中心軸19)側に移動させて、超音波(主ローブ)を送受波するためのチルト角の範囲を広げる。これにより、前記グレーティングローブの発生が抑制されて、より広いチルト角の範囲で正確な角度情報を得ることが可能となる。また、球状の超音波送受波器と比較して、振動子18の数を増大させることなく、超音波送受波器10を容易に製造することができる。
(もっと読む)
水中探知装置
【課題】魚群の分布態様に一定の特徴がある場合に、一回の送受信によって精度の高い魚量情報を算出することができる水中探知装置を提供すること。
【解決手段】円錐面状または平面状の探知領域の探知を行う際、一回の送受信によって形成される送受信ビームの垂直ビーム幅Δθの内部に計測対象魚群の全体が含まれるような場合に、得られたエコーデータに、各探知点における送受信ビームの厚みrΔθを乗じた上で、上記円錐面または平面に沿って面積積分することで当該魚群の魚量情報を算出する魚量情報算出部を設けた。
(もっと読む)
超音波送受波装置
【課題】船体の振動における送受波周波数成分を超音波送受波器の超音波振動子で受信しないようにして、S/N比の優れる超音波送受波装置を実現する。
【解決手段】超音波送受波器110は超音波振動子11とこれを覆うウレタン等の保護部材112とからなる。超音波送受波器110は船体タンク102を構成する壁部201に対して、取り付け板212、防音部材215、保持部材214からなる部材群により保持される。保持部材214は保護部材112と固有音響インピーダンスが異なる鉄を材質とし、取り付け板212も保持部材214と同じ材質からなる。防音部材215は保持部材214および取り付け部材212と異なる固有音響インピーダンスのクロロプレンゴムを材質とし所定の厚みdからなる。このように互いに接する部材同士の固有音響インピーダンスが異なり、中間の部材の厚みが適宜設定されることにより、境界面で送受波周波数成分を反射する。
(もっと読む)
魚群探知機
【課題】単体魚等の小さな物標や、深度方向に移動する物標からの有用なエコーを損なわずに、他の超音波装置からの干渉を除去する魚群探知機を提供すること。
【解決手段】干渉除去処理対象とする今回のエコーデータと、前回の送受信によって得られた当該エコーデータを含む深度範囲に属するエコーデータのうちで信号強度が最大のエコーデータと、を比較し、信号強度が小さいほうのエコーデータを、干渉除去処理対象とする今回のエコーデータに対する、干渉除去済みエコーデータとして出力するようにした。
(もっと読む)
水中探知装置
【課題】海底によるレンジサイドローブを抑圧して、海底付近の探知映像を鮮明に表示する水中探知装置を提供すること。
【解決手段】本発明の水中探知装置は、パルス圧縮信号に対してレンジサイドローブ抑圧処理を行う抑圧範囲を決定する抑圧範囲決定部と、パルス圧縮信号の各深度のデータがレンジサイドローブにあたるデータか否かを判定するエコー判定部と、パルス圧縮信号の各深度のデータに対する抑圧値を決定する抑圧値決定部と、パルス圧縮信号の抑圧範囲に属するデータのうち、エコー判定部においてレンジサイドローブにあたるデータと判定されたデータに対して、抑圧値に基づいてレンジサイドローブを抑圧する演算を実行する抑圧演算部と、抑圧演算部から出力される信号から表示用信号を生成して探知情報を表示する表示処理部とを備えることを特徴とする。
(もっと読む)
パルス信号の送受信装置
【課題】ハードウェアの複雑化とコストアップを招くことなく、またSN比、探知距離等の探知性能を劣化させることなく、レンジサイドローブを低減するパルス信号の送受信装置を提供すること。
【解決手段】送信パルス信号の波形に略等しい波形の試験信号を入力したときに出力される信号のフーリエ変換が、所定の窓関数となるような入出力特性を有するパルス圧縮フィルタ7により、受信信号をパルス圧縮処理する構成とした。パルス圧縮フィルタ7によるフィルタ処理によって出力信号の所望のレンジサイドローブレベルを実現できるため、送信信号にガウス窓のような尖鋭な形状の窓関数を掛ける必要もなく、SN比、探知距離等の探知性能を必要以上に劣化させることもない。
(もっと読む)
超音波プローブ装置及び超音波画像化装置
【課題】 開口長の大きさを制御可能とし、画像分解能及び観測対象距離を限定することなく、超音波による良好な画像化を実現することができる超音波プローブ装置等を提供すること。
【解決手段】 近距離を画像化する場合には開口長Hを小さくとり、遠距離を画像化する場合には開口長Hを大きくするように、開口長を伸張、収縮させる。また、開口長を伸張、収縮に連動して、画像化領域が各超音波プローブからの超音波指向角幅に含まれるように、各超音波プローブの姿勢を制御する。
(もっと読む)
魚群探知機
【課題】魚群の位置や移動方向を容易かつ迅速に理解できる魚群探知機を提供する。
【解決手段】画像表示器9の反響波表示領域27に、上下の基準線Lに対して左右対称の水深方向が設定され、且つ該基準線Lに沿って時間軸Tが設定された左右の区画表示域27a,27bを備え、船の左側に備えた送受波部20aから得た反響波情報を、左区画表示域27aに、船の右側に備えた送受波部20bから得た反響波情報を、右区画表示域27bに、時間軸Tに沿って時系列順に夫々表示するようにしたものであるから、船の左右いずれの方向に魚群がいるかを容易に理解できると共に、左右の反響波情報を容易かつ直感的に関係付けることでき得るため、釣果が向上し易い。
(もっと読む)
水中探知装置
【課題】TVG(Time Variable Gain)の機能を維持しつつ、ノイズレベルが増加した場合でも、画面上にノイズ映像が表示されないようにする。
【解決手段】ノイズレベルが上昇した場合に、TVGの利得が飽和状態となるTVGリミットをL1からL2へ自動的に変更する。TVGリミットをノイズレベルに応じて距離の短くなる側にシフトさせることで、利得の飽和する時点が近距離側にシフトし、利得が一定値となる領域が拡大する。これにより、ノイズレベルが表示レベルを超えないようにすることができ、ノイズが効果的に抑制される。
(もっと読む)
水中探知装置
【課題】
尾引き信号に影響されることなく水面近くの魚群を探知でき、かつ、海底からのエコーや、尾引き信号の影響を受けてない水面から離れた深度範囲に分布している魚群からのエコーを、本来の信号強度に対応した色で表示することができる水中探知装置を提供すること。
【解決手段】
尾引き信号除去処理を行う深度範囲を最適に制御する尾引き信号除去範囲制御部12を設け、尾引き信号除去部6における尾引き信号除去処理を、尾引き信号の影響を受ける深度範囲に限定して行うようにした。
(もっと読む)
GPS魚群探知装置
【課題】 従来の魚群探知装置では、自船の周囲に何も表示されていないために、現在の探知エリアをプロッタ上で把握することはできないという問題があった。
【解決手段】表示地図作成部12からの表示地図データは画像用メモリ15で記憶され、超音波振動子16が接続された受信回路17にエコー検出器18が接続され、エコー検出部18に水深検出部19が接続され、水深検出部19は探知範囲直径計算部20に接続され、探知範囲直径計算部20に指向角データ出力部21が接続され、探知範囲直径計算部20の出力は表示円直径計算部22に接続され、表示円直径計算部22に地図縮尺データ出力部14からの地図縮尺データが入力され、表示円直径計算部22の出力は表示円作成部23に入力され、表示円作成部23の出力は画像メモリ15で記憶され、画像用メモリ15の出力は画像表示回路24に入力され、画像表示回路24の出力は画像表示装置25に入力される。
(もっと読む)
水中探知装置
【課題】FET等の応答速度の限界等により水中探知装置から送信する超音波信号のエンベロープ制御の制御幅が小さく、スプリアスの発生を抑えたりレンジサイドローブのレベルを小さくしたりすることができなかった。
【解決手段】本発明の水中探知装置1は、所定の電圧を供給する電源HVと、制御信号Viにより前記電圧を制御する電圧制御回路40と、ゲート信号G1乃至ゲート信号G4を出力するゲート信号生成部50と、前記電圧制御回路40により制御された電圧および前記ゲート信号生成部50から出力されたゲート信号G1乃至ゲート信号G4に基づいて基準信号VTDを出力するスイッチング回路10と、前記基準信号VTDが印加されることで前記制御信号Viの波形に基づきエンベロープ制御された超音波信号Prを水中に送信する振動子30と、を備えることを特徴とする。
(もっと読む)
41 - 60 / 117
[ Back to top ]