
Fターム[5J083AF18]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 送受波器(センサ、ソーナー)の設置 (1,005) | 移動体設置 (814) | 水中航走体(潜水艦) (40)
Fターム[5J083AF18]に分類される特許
1 - 20 / 40
海中ネットワーク管理システム、及び海中ネットワーク管理方法、移動体装置
水中映像取得装置

【課題】 超音波を用いた水中映像取得装置において、自立型無人潜水器に搭載するためには装置の小型化が必須である。また、運用時間延長のために低消費電力化、移動物体観察のために高フレームレート化、小型反射体観察のための高分解能化が、実用化への障壁となる。
【解決手段】 球状の音響レンズ、あるいは球状の音響レンズと同等な効果を発揮する音響レンズを設けることで、音響レンズのみで到来波の垂直および水平方向に分解することを可能とする。音響レンズ通過後の超音波を検出することにより、反射波の到来方向を知りイメージングが可能となる。また、小型で高分解能、広視野角な音響レンズを提供する。さらに、低消費電力かつ、高フレームレートな水中映像取得装置を提供する。
(もっと読む)
アクティブソーナー装置及びその信号処理方法

【課題】アクティブソーナー装置において、目標をより確実に検出できるようにする。
【解決手段】アクティブソーナー装置における信号処理方法は、第1の時間幅を有する音波信号を媒質に送波することと、媒質を伝播してきた音波信号を受波音波信号として受波することと、受波音波信号の時間軸を第1の時間幅よりも短い第2の時間幅で区切ったものをそれぞれ時間セルとして、各時間セルごとに、受波音波信号の到来方位と強度とを求めることと、各時間セルごとに、その時間セルを含む複数の連続する時間セル内での到来方位の方位集中度を算出し、その時間セルでの強度に方位集中度を重み付けしたものを検出値とすることと、を有する。
(もっと読む)
水中物体捜索計画立案支援方法およびその装置
【課題】水中物体がとり得るあらゆる回避行動パターンを想定した上で、水中物体を効率良く捜索する捜索計画を立案すること。
【解決手段】本発明は、海洋内に潜在する水中物体を捜索する捜索計画の立案を支援する、水中物体捜索計画立案支援装置が行う水中物体捜索計画立案支援方法に適用される。本方法は、前記水中物体の複数の回避行動パターンと、前記複数の回避行動パターンの各々の発生確率と、を記憶部に設定する設定ステップと、捜索領域内に前記水中物体が一様に分布する状態を初期状態として、前記発生確率に応じた回避行動パターンに従って前記水中物体を回避行動させるシミュレーションを開始するシミュレーションステップと、シミュレーション後における前記捜索領域内の前記水中物体の存在分布を表示部に表示する表示ステップと、を有する。
(もっと読む)
合成開口探査装置および水中航走体
【課題】沈底物と埋設物とを同時に、かつ、効率的に探査すること。
【解決手段】水中航走体に搭載されるとともに、第1の周波数の音波ビームを送受信して画像信号を得る高周波合成開口ソナー2と、水中航走体に搭載されるとともに、第1の周波数よりも低い第2周波数の音波ビームを送受信して画像信号を得る低周波合成開口ソナー3とを備え、高周波合成開口ソナー2と低周波合成開口ソナー3とを略同期送信させるとともに、高周波合成開口ソナー2のフェーズセンタおよび低周波合成開口ソナー3のフェーズセンタがそれぞれ等間隔になるように、高周波合成開口ソナー2と低周波合成開口ソナー3のチャネル数、物理開口長、及び送信周期並びに水中航走体の速度が調整されている合成開口探査装置1を提供する。
(もっと読む)
水中航走体誘導システム、個別航走体水中走行制御方法、及びその制御プログラム
【課題】本発明は、予め設定された目標物に向けて、水中航走行体を有効に音響ホーミングさせるようにした水中航走体誘導システムを提供することにある。
【解決手段】周波数の異なる二つの誘導超音波信号S1,S2に順次案内されて目標物Mに向けて水中航走する一の個別航走体2と、第1,第2の誘導超音波信号S1,S2を発信する主航走体1とを設ける。一方の誘導信号S1は周波数の低い無指向性の超音波が使用され、他方の誘導信号S2は目標物Mに向けて周波数の高い超音波が発信される。そして、前述した一の個別航走体2は、一方の誘導信号S1を受信し且つ受信音圧が高くなる方向に航走する第1の水中航走実行機能と、この誘導信号S1の受信音圧のレベルが基準値以上となった場合に目標物Mからの反射である他方の誘導信号S2に向けてその航走方向を切換えてその方向に水中航走を実行する第2の水中航走実行機能とを備えている。
(もっと読む)
水底下物体の探査類別方法
【課題】探査と類別の計測時間を短縮可能な水底下物体の探査類別方法を提供する。
【解決手段】予め、形状や材質の異なる複数の既知の水底下物体21を用い、水中航走体2を既知の水底下物体21の周りで直線状あるいは曲線状に航行させたときの散乱波のレベルパターンを作成してデータベースとして蓄積しておき、水中航走体2を、測定対象の水域で直線状あるいは曲線状に航行させつつ、送波器3から音波を送波して散乱波の計測を行うと共に、水中航走体2を、測定対象の水域で格子状に縦横に航行させて、測定対象の水域中の任意の測定点に対して散乱波の計測を行うようにし、計測した散乱波の強度から水底下物体21を検知すると共に、計測した散乱波の強度を基に散乱波のレベルパターンを作成し、当該散乱波のレベルパターンをデータベースと照合することで、水底下物体21の類別を行う。
(もっと読む)
海底音響映像システム
【課題】合成開口技術とインターフェロメトリ技術を用い、海底面及び海底面上、及び海底面下の物体の三次元画像を高分解能で生成可能な海底音響映像システムを提供する。
【解決手段】海中を航行するプラットフォーム60に取り付けられ、航行する方向に垂直な向きで海底面に第1探査波を照射する送波器72と、航行する方向に垂直な方向、且つ前記第1探査波の照射方向に交差する方向に配列され、反射波をそれぞれ受波する受波アレイ74と、反射波から合成開口処理情報を生成する合成開口演算処理部と、前記プラットフォーム60の位置情報を生成する慣性航法装置と、合成開口処理済みの反射波同士の位相差に基づいて反射波の到来角を算出するとともに、前記到来角と、前記位置情報と、に基づいて反射波の反射源の三次元の位置を算出するインターフェロメトリ演算部と、を有する。
(もっと読む)
水中目標物検出装置、該検出装置に用いられる目標物検出方法及び目標物検出プログラム
【課題】水中目標物検出装置での目標物のアスペクト及び方位、全長の推定精度を向上させる。
【解決手段】発振器31から送波器32に駆動信号adが与えられ、音波パルスapが送波される。受波器33により、音波パルスapが目標物20に到達したときの反射波の直接波df,de及びマルチパス波mf,meが合わせて受波されて受信信号wrが出力される。受波指向性合成部34により、受信信号wrが入力され、目標物20を指向するように受波ビームが指向性合成されて合成受信信号trが出力される。マルチパス補正部35により、合成受信信号trから、予め保持されているマルチパス波受信信号の時間幅を特定する情報を基にマルチパス波受信信号が除去され、直接波df,deに対応する直接波受信信号drが出力される。相関処理部36により、直接波受信信号drに基づいて、位相の相異なる直接波受信信号dr同士の相関値が算出されて目標物20が検出される。
(もっと読む)
機雷掃海システム
【課題】 機雷探知機において、目標物が含まれた信号から目標物信号成分を自動で検出するための信号処理装置と、目標物が含まれた信号を送信する水中音響通信装置を提供する。
【解決手段】 エコー信号に対してウェーブレットパケット変換を適用し周波数分解を行うことによって、目標物からのエコー信号成分が多く含まれていると予測されるものと、そうでないものとに分類する。そうでないものとされた信号成分はすべて0に置換し、また、予測された信号の主要な成分のみをさらに抽出し、その信号成分のみを用いて逆ウェーブレットパケット変換を行い、再構成を行う。これにより、予測信号の中に目標信号があればその成分だけ抽出することができる。さらに、前記手段で発見された目標物の付近の情報のみを音波を用いて転送する。目標物探知を精度良く行い、その結果のみを転送することにより、帯域に多大な制限を受ける水中音響通信においても、そのリアルタイムでの運用が現実的になる。
(もっと読む)
無人の水中航走体および無人の水中航走体を運転するための方法
【課題】水中の対象物の構造および輪郭を可能な限り迅速にかつ正確に検出することができるようにする。
【解決手段】無人の水中航走体1であって、少なくとも1つのセンサユニット7が設けられており、該センサユニット7によって、水中航走体1の周辺における対象物のセンサ情報8が獲得可能である。少なくとも1つのセンサユニット7が、水中航走体1の長手方向軸線14に対して接線方向の水中航走体1の接線方向12に可動に配置されているかまたは長手方向軸線14に対して平行に延びる軸線に対して接線方向の水中航走体1の接線方向12に可動に配置されていて、センサ情報8が設定可能である位置決め装置13によって接線方向12において位置決め可能である。
(もっと読む)
合成開口ソナーのための方法及びシステム
【課題】ソナーアレイの水中での動きに応じて、ソナーアレイの位置及び向きの推定値を与える能力を改善する方法、及びシステムを提供する。
【解決手段】複数のビームフォーム信号間の相関をとることにより、動いているソナーアレイの複数の高精度高度差、及び複数の高精度水平変位を与えるようにしたソナーアレイの位置推定値を改善する方法、及びシステム。
(もっと読む)
フェイズドアレイ合成開口ソナーシステム
【課題】ソナー画像の精度を上げつつ、処理速度を落とさないことを目的とする。
【解決手段】プラットフォーム12に複数設置されている受信素子31から入力された受信データを、同時に受信したデータ毎に複数のフェイズドアレイ処理装置9に分散するフェイズドアレイ振分装置8と、受信データに対するフェイズドアレイ処理を並列に行なう複数のフェイズドアレイ処理装置9と、複数のフェイズドアレイ処理装置9から出力されたフェイズドアレイ処理結果を、受信データの受信順に合成開口処理装置11へ送るデータシェーピングバッファ装置10と、送られた複数のフェイズドアレイ処理結果を用いて合成開口処理を行なう合成開口処理装置11と、を有することを特徴とする。
(もっと読む)
水中航走体の航走制御方法及び装置
【課題】 複数の水中航走体に装備する音響スキャンソナーの数を低減させる。
【解決手段】 音響スキャンソナー6を備え、位置表示装置2を搭載して航走できるようにした位置特定用水中航走体1と、位置表示装置2に対する相対位置を検出するための相対位置検出装置8を有する被誘導用水中航走体3を形成する。先ず、位置特定用水中航走体1を航走させて音響スキャンソナー6により海底4の特定位置4aを正確に検出させて、そこに位置表示装置2を設置させる。その後、被誘導用水中航走体3を航走させるときに、相対位置検出装置8により位置表示装置2との相対位置を検出させ、検出された位置表示装置2に向けて航走させることで、被誘導用水中航走体3を海底4の特定位置4aまで正確に到達させる。
(もっと読む)
弾性非線形フィルタリングを介した同時的な位置特定およびマッピング用の方法
本発明による方法は、海底の所与のゾーン上を移動する水中機によって、海底に存在する起伏要素および物体の位置を推定する基礎となる観測を実行することに存する。これらの観測は、架空物体に関連付けられ、架空の弾性リンクによって一緒に連結されて架空の弾性ネットワークを構成する。ネットワークは、ネットワークを構成する架空物体の一方または他方に作用が及ぼされない限り、平衡状態にある。次に、物体は、固定位置、すなわち、対応する観測に割り当てられた位置を占める。他方において、同一の物体に対応すると仮定された2つの観測が、単一の観測に融合された場合に、2つの対応する架空物体は、近づけられる。このように近づけられることによって、架空の弾性ネットワークにおける応力の出現が誘発される。架空の弾性リンクによって伝達されるこれらの応力は、ネットワークにおける架空物体の位置の修正によって解消され、修正された位置が、対応する観測に割り当てられる。このように、2つの融合された観測の対象を形成した物体の推定位置が補正された場合に、架空の弾性ネットワークにおいて表された観測を生じさせた物体それぞれの推定位置の測定は、この補正から有利に利益を得る。 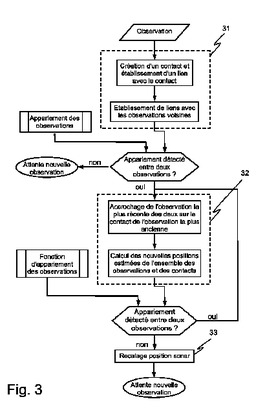 (もっと読む)
(もっと読む)
合成開口ソーナー
【課題】送受波器の動揺を補正し、合成開口処理への影響を軽減した合成開口ソーナーを提供する。
【解決手段】仮想の単一配列に動揺を加えず基準位置との間の伝搬距離を計算する第1伝搬距離計算器と、複数配列に動揺検出処理部からの動揺量を擬似的に加えて基準位置との間の伝搬距離を計算する第2伝搬距離計算器と、それらの出力の伝搬距離差から動揺量を計算する補正量計算器と、この動揺量に基づいて受信信号に動揺補正を行なう動揺補正器と、i回目の送波とi+1回目の送波に対応する送波器と受波器の中間位置の一部が、一致するように送信タイミングを制御するPRF制御器と、i回目の送波とi+1回目の送波に対応する受信信号を出力する動揺補正器と、受信信号の目標との間の伝搬距離差から動揺量を検出する自己補正量計算器と、この動揺量に基づき受信信号にさらなる動揺補正を行なう自己動揺補正器とを組み合わせ、動揺補正を行なう。
(もっと読む)
音響反射体
本発明による音響反射体は、コアを取り囲むシェルを含み、このシェルは、シェルの表面に入射した音波をコア内に伝達して集束させ、入射領域の反対側に位置するシェルの領域で反射させて、反射体から反射音響信号を出力することができる。また、シェルはコアを有し、シェルのコアに対する寸法は、シェル壁に入射した音波の一部がシェルに結合し、シェルの円周に沿って誘導され、次に再放射され、反射体から出力された反射音響信号と合わさって強い反射音響信号が出力されるように設定される。コアにおける音波伝達平均速度に対するシェルにおける音波伝達速度の比は、好ましくは2.74〜3.4であり、より好ましくは2.74〜2.86である。水中のパイプラインへの応用や、洗掘の測定及び反射体のアレイにも適用できる。 (もっと読む)
水底下物体の探査類別方法及び装置
【課題】散乱波のレベルが高く類別に適した周波数を簡易に選定でき、水底下物体を精度よく類別可能な水底下物体の探査類別方法及び装置を提供する。
【解決手段】周回中に送波器3から所定の帯域で周波数を変化させた音波を送波すると共に、受波器4でその散乱波を受波して、水底下物体に対する方位角度を縦軸、周波数を横軸とした周波数散乱レベルの分布を作成し、作成した周波数散乱レベルの分布を基に、散乱波の強度が高く類別に適した周波数を選定すると共に、選定した周波数における散乱波の方向レベルパターンを抽出し、その散乱波の方向レベルパターンを予め蓄積したデータベースと照合することで、水底下物体の類別を行う。
(もっと読む)
水中情報収集システム
【課題】水中航走体の移動領域の制約を低減すること。
【解決手段】水中航走体1は、自己の有する動力で水中を移動可能であり、水中情報を収集するサイドスキャンソーナ10C等と、サイドスキャンソーナ10C等が集めた水中の情報を送信可能な水中側第1音響モデム12Hとを有している。水上移動体2は、水中側第1音響モデム12Hと通信可能であり、水中側第1音響モデム12Hから送信された水中情報を受信する水面側第1音響モデム22Hと、水中航走体1の位置を検出する水中位置計測装置21とを有する。そして、水上移動体2は、水中航走体1の位置を検出しながら、水中航走体1の移動に合わせて水面Hを移動する。
(もっと読む)
音波撮像装置
【課題】海中での音波撮像装置において、海底堆積層が存在することによって生じる音波画像の位置のズレ・低いコントラスト(ぼやけ)・輪郭の歪み解消し、高精細・高解像度の音波画像を得る。
【解決手段】ソーナー送受信部300で受信した信号から底質計算部302で海底堆積層の物理パラメータを推定し、推定された物理パラメータから画像補償計算部304で堆積層の補正用データを生成する。補償画像処理部306は、この補正用データとソーナー受信信号307を用いて、堆積層の音波伝搬に起因する受信信号もしくは音波画像のズレや歪みが補正されたソーナー画像を生成する。さらに、対照情報生成部において、補正された音波画像と基準画像310を比較し、その残渣分をさらなる補正にフィードバックして補正の高精度化を行う。
(もっと読む)
1 - 20 / 40
[ Back to top ]