
Fターム[5J083AG06]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 組合せ (299) | ソーナーと方探 (117)
Fターム[5J083AG06]の下位に属するFターム
Fターム[5J083AG06]に分類される特許
1 - 2 / 2
潮流測定装置
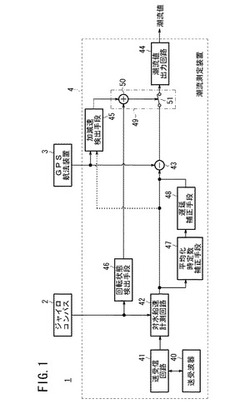
【課題】絶対船速と対水船速との差から潮流を演算する際に、船舶の加減速及び回頭等があっても、常に安定した潮流を得ることができる潮流測定装置を提供する。
【解決手段】加減速検出手段45は、航法装置3から出力された絶対船速又は対水船速計測回路42から出力された対水船速に基づいて、船舶1が加速状態又は減速状態にあることを検出し、検出結果を加算器50に出力する。回頭状態検出手段46は、ジャイロコンパス2から出力された船首方位に基づいて、船舶1が回頭状態にあることを検出し、検出結果を加算器50に出力する。演算停止手段49の加算器50は、検出結果が入力されたときに、スイッチ51における潮流演算回路43と潮流値出力回路44との接続状態をオン状態からオフ状態に切り替えるように該スイッチ51を制御する。
(もっと読む)
ソーナー探知情報処理装置

【課題】ソーナーを曳航する回転翼航空機で海底の目標を探知した際に、機上にてその深度情報を含む目標の位置情報を取得することのできるソーナー探知情報処理装置を得る。
【解決手段】深度情報を含む海底地図データベースを機上に有し、航法データや曳航情報等に基づき航空機から曳航されるソーナーの実座標での位置情報を算出・更新しながら、このソーナーで受信したソーナービデオ信号をその実捜索幅及び実捜索長を直交2軸とした2次元画面に表示する。そして、目標を探知した際は、この表示画面上で指定される目標位置を表示座標系から実座標系に変換し、実座標系の目標位置としての緯度・経度を算出するとともに、機上に搭載した海底地図データベースを検索してこの目標位置の海底深度を取得する。
(もっと読む)
1 - 2 / 2
[ Back to top ]