
Fターム[5J083AG07]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 組合せ (299) | ソーナーと方探 (117) | ソーナーとジャイロ (43)
Fターム[5J083AG07]に分類される特許
1 - 20 / 43
海中ネットワーク管理システム、及び海中ネットワーク管理方法、移動体装置
ポインティングシステム
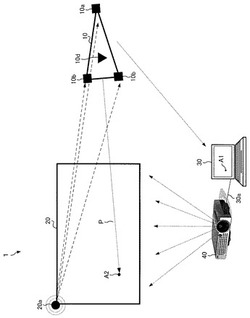
【課題】音波発信装置または音波受信装置のいずれか一方が単数であっても、ポインティングデバイスの指し示す方向を推定し、指示点の表示を行なう。
【解決手段】変調音波を発信する単一のスピーカ20aと、ポインティングデバイス10に設けられた複数のマイク10a〜10cと、ポインティングデバイス10の傾きを検出するジャイロセンサ10dと、スピーカ20aからマイク10a〜10cが受信した変調音波に相関処理を施して、マイク10a〜10cとスピーカ20aからの距離または距離差を算出し、距離または距離差に基づいて、マイク10a〜10cの空間上の位置を推定し、ポインティングデバイスの方向ベクトルを推定し、方向ベクトルと平行な直線と平面としてのスクリーン20との交点A2を推定するPC30と、を備える。
(もっと読む)
海底音響映像システム

【課題】合成開口技術とインターフェロメトリ技術を用い、海底面及び海底面上、及び海底面下の物体の三次元画像を高分解能で生成可能な海底音響映像システムを提供する。
【解決手段】海中を航行するプラットフォーム60に取り付けられ、航行する方向に垂直な向きで海底面に第1探査波を照射する送波器72と、航行する方向に垂直な方向、且つ前記第1探査波の照射方向に交差する方向に配列され、反射波をそれぞれ受波する受波アレイ74と、反射波から合成開口処理情報を生成する合成開口演算処理部と、前記プラットフォーム60の位置情報を生成する慣性航法装置と、合成開口処理済みの反射波同士の位相差に基づいて反射波の到来角を算出するとともに、前記到来角と、前記位置情報と、に基づいて反射波の反射源の三次元の位置を算出するインターフェロメトリ演算部と、を有する。
(もっと読む)
目標物探知システム、探知方法、及び探知情報処理プログラム
【課題】レーダ,ソナー,又はライダーから成る送受信機を備えた目標物探索システムにあって、S/N比が低く反射信号が雑音に埋設されそうな環境下にあっても、目標物を有効に捕捉することを可能とした目標物探知システムを提供すること。
【解決手段】方位設定が可能で異なる設置位置にそれぞれ配置された目標物探索用の少なくとも二個の送受信機1,2と、この各送受信機1,2により探索された目標物Mの方位にかかる反射情報に基づいて当該目標物Mの位置を特定する位置算出手段12を備えた主制御装置10とを設け、前記位置算出手段12が、前記二個の送受信機1,2によって得られた目標物Mの方位にかかる情報を、前記各送受信機1,2の位置情報を基準として重ね合わせ処理することにより前記目標物Mの位置を特定する機能を備えていることを特徴とする。
(もっと読む)
港湾構造物計測装置
【課題】水中部分と水上部分、及び両者の境界部分も連続的に測定できる港湾構造物計測装置を提供する。
【解決手段】陸上に設置されたGPS基準局11と、測定機器を搭載した曳航体12と、曳航体を測定水域に沿って曳航する曳航船13とから成り、GPS基準局は、衛星S1〜S3からの電波を受信するGPS受信機14とデータリンク装置15を備え、曳航体は、GPSアンテナと、モーションセンサーと、マルチビーム測探機ソナーヘッドと、レーザースキャナーとを搭載し、曳航船は、マルチビーム測探機プロセッサーと、データリンク装置との間で位置情報を授受するインターフェイスボックスと、インターフェイスボックス及びマルチビーム測探機プロセッサーと接続されたデータ収録装置と、レーザースキャナー及びインターフェイスボックスと接続された第2データ収録装置とを備え、水中部分と水上部分と共に、境界部分も連続的に測定する。
(もっと読む)
フェイズドアレイ合成開口ソナーシステム
【課題】ソナー画像の精度を上げつつ、処理速度を落とさないことを目的とする。
【解決手段】プラットフォーム12に複数設置されている受信素子31から入力された受信データを、同時に受信したデータ毎に複数のフェイズドアレイ処理装置9に分散するフェイズドアレイ振分装置8と、受信データに対するフェイズドアレイ処理を並列に行なう複数のフェイズドアレイ処理装置9と、複数のフェイズドアレイ処理装置9から出力されたフェイズドアレイ処理結果を、受信データの受信順に合成開口処理装置11へ送るデータシェーピングバッファ装置10と、送られた複数のフェイズドアレイ処理結果を用いて合成開口処理を行なう合成開口処理装置11と、を有することを特徴とする。
(もっと読む)
水中航走体の航走制御方法及び装置
【課題】 複数の水中航走体に装備する音響スキャンソナーの数を低減させる。
【解決手段】 音響スキャンソナー6を備え、位置表示装置2を搭載して航走できるようにした位置特定用水中航走体1と、位置表示装置2に対する相対位置を検出するための相対位置検出装置8を有する被誘導用水中航走体3を形成する。先ず、位置特定用水中航走体1を航走させて音響スキャンソナー6により海底4の特定位置4aを正確に検出させて、そこに位置表示装置2を設置させる。その後、被誘導用水中航走体3を航走させるときに、相対位置検出装置8により位置表示装置2との相対位置を検出させ、検出された位置表示装置2に向けて航走させることで、被誘導用水中航走体3を海底4の特定位置4aまで正確に到達させる。
(もっと読む)
水中航走体の位置較正方法
【課題】 慣性航法位置の較正に要する音響測位回数及び水中航走体のエネルギー消費を低減させ、音響測位精度を向上させる。
【解決手段】 水中航走体6を、定点保持又は着底により海底21に対する相対位置変化を停止させる。この状態で、支援船7側からの音響測位を複数回行い、各計測結果における緯度方向の平均と経度方向の平均を求めて、水中航走体6の統計的に正しい緯度と経度を備えた音響測位位置を求める。又、水中航走体6自身による慣性航法に基づく測位を行い、その緯度及び経度について、音響測位位置の緯度及び経度と比較して、緯度方向と経度方向の偏差をそれぞれ求め、求められた緯度方向及び経度方向の偏差により、水中航走体6自身による慣性航法に基づく緯度と経度のデータを較正させる。更に、音響測位時に支援船7を水底付近に停止させた水中航走体6の鉛直線上付近に保持することで音響測位精度を向上させる。
(もっと読む)
水中航走体の位置較正方法
【課題】 音響測位可能な領域が小さくても精度よく位置較正できるようにする。
【解決手段】 音響測位実施可能領域23に、円周状位置検出用経路24を設定する。水中航走体6を、自身で計測する慣性航法位置25に基づいて円周状位置検出用経路24に沿って航走させながら、支援船側より音響測位を行う。次いで、水中航走体6が最も東寄りに位置するときの音響測位位置26の経度成分の代表値27と、慣性航法位置25の経度成分の代表値29から経度方向に関する偏差δxを求め、水中航走体6が最も南寄りに位置するときの音響測位位置26の緯度成分の代表値28と、慣性航法位置25の緯度成分の代表値30から緯度方向の偏差δyを求める。その後、各偏差δx,δyにより水中航走体6が自身で測位する慣性航法位置25を較正させる。
(もっと読む)
水中航走体の位置較正方法
【課題】狭い領域で運用する水中航走体についても、精度よく較正できるようにする。
【解決手段】水槽22内で運用される水中航走体について、水槽22の短辺22aと長辺22bに平行に沿わせて位置検出用経路23aと23bを長く設定する。水中航走体を自身で検出する慣性航法位置を基に各位置検出用経路23aと23bに沿って航走させるときに、支援船側より音響測位を複数回行う。上記各位置検出用経路23aと23bごとに、得られる音響測位位置D4と、慣性航法位置について、それぞれ直交する方向の代表値を求め、求められた両代表値の差として、各位置検出用経路23a,23bに直交する方向に関する慣性航法位置の偏差δxとδyをそれぞれ求め、この偏差δx,δyにより水中航走体が自身で測位する慣性航法位置を較正させる。
(もっと読む)
水中航走体の位置較正方法
【課題】 音響通信が不安定でも位置較正を実施できるようにする。
【解決手段】 水中航走体を、慣性航法位置に累積誤差がなくて精度が高い状態のときに、緯度方向と経度方向の各アップデート用経路22,23に沿って航走させながら、支援船側より音響測位を行い、得られた音響測位位置24aの緯度成分の代表値を緯度方向基準値25、音響測位位置24bの経度成分の代表値を経度方向基準値26とする。その後、慣性航法位置に誤差が累積した水中航走体を、緯度方向と経度方向の各位置アップデート用経路22,23に沿って再び航走させ、この際、支援船側からの音響測位で得られる音響測位位置27aの緯度方向の代表値28、及び、音響測位位置27bの経度方向の代表値29を、緯度方向と経度方向の各基準値25,26と比較して緯度方向と経度方向の偏差δx、δyを求める。この偏差δx,δyにより水中航走体の慣性航法位置を較正させる。
(もっと読む)
水中航走体の位置較正方法及び装置
【課題】 音響通信の速度が限られていても精度よく較正できるようにする。
【解決手段】 水中航走体6を、緯度方向位置検出用経路22と経度方向位置検出用経路23に沿って航走させながら、支援船7側より音響測位を行う。得られた音響測位位置D4の緯度成分と経度成分の代表値D5x,D5yのみを、音響通信を介して水中航走体6の水中航走体制御装置15へ与える。水中航走体制御装置15では、緯度方向と経度方向の各位置検出用経路22,23を航走したときに水中航走体6が自身で計測していた慣性航法位置d4の緯度成分と経度成分の代表値d5x、d5yを求め、これを支援船7側より与えられた音響測位位置D4の緯度成分と経度成分の代表値D5x,D5yより減算して緯度方向と経度方向の偏差δx,δyを求め、この緯度方向と経度方向の偏差δx,δyにより水中航走体6が自身で計測していた慣性航法位置d4を較正させる。
(もっと読む)
整相システム、整相装置及び整相プログラム
【課題】変形したえい航型ラインアレイの形状を推定することができ、推定したえい航型ラインアレイの形状から指向性を補償した整相処理を行なうことができるようにする。
【解決手段】本発明の整相システムは、複数の受波器及びセンサを備えるラインアレイと、整相装置とを備え、整相装置が、センサからのセンサ情報及びえい航体の方位情報に基づいて、ラインアレイ上の複数の疑似的な位置から出力されたとみなす複数の疑似センサ出力情報を生成する疑似出力生成手段と、複数の疑似センサ出力情報及び複数の疑似的な位置に基づきラインアレイの形状を推定し、この推定したラインアレイ上での複数の受波器の位置を求めるラインアレイ形状推定手段と、複数の受波器からの受波信号に対して、ラインアレイ形状推定手段により求められた対応する受波器の位置で音波を受波したときの遅延時間を付与して受波信号の位相を整相する整相処理手段とを有する。
(もっと読む)
水中画像全方位表示処理装置及び方法
【課題】送受波器自体が回転してしまう可能性があるソーナーの場合にも、適切な回転補正を行うことによって、全方位において正確な水中画像を表示する。
【解決手段】開示される水中画像全方位表示処理装置は、送波部S001〜S004において複数の送波アレイから順次送波したタイミングで、受波部において受波アレイR001を構成する複数個の受波素子で目標からの反射音を受信して取得したそれぞれの送波アレイからの放射音に対応する反射音の受波データに基づいて得られた画像処理後の位置データに対して、受波アレイで受信した三方向の回転行列による演算を行って、送受波器の向きをメモリ210のジャイロデータによってヨウ,ピッチ,ロールの三方位のデータとして随時取得する位置補正処理回路200と、取得したデータを用いて演算結果を送受波器固定座標から地球を基準とした絶対座標に座標変換を行って合成画像を得る画像合成処理回路220とを備えている。
(もっと読む)
位置決定システム
本発明は、オブジェクト(2)の位置を決定するための位置決定システム(201)に関する。第一位置検出ユニット(205)が、送受信ユニット(203、214、216、217)によってオブジェクト(2)と基準位置に対して知られている転送位置との間で転送される放射に基づいて、オブジェクト(2)の第一の位置を検出する。第二位置検出ユニット(35)が、オブジェクト(2)の加速度および決定された前記第一の位置に基づいて第二の位置を検出する。出力ユニット(12)が、第一の位置および第二の位置の少なくとも一つを出力する。放射の転送が遮られても、第二の位置が出力ユニットによって出力されることができる。さらに、第一の位置が、第二の位置を決定するまたは第二の位置を更新するための初期値として使用されることができる。これはオブジェクトの位置決定の品質を改善する。 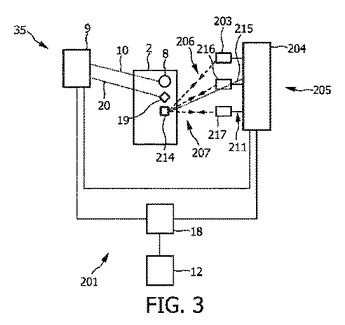 (もっと読む)
(もっと読む)
ソナー・システム
【課題】船舶の移動中の操作を容易にし、船舶上の動く歩道からの高解像度画像を提供する船舶搭載可能ソナー・システムを提供すること。
【解決手段】船舶搭載可能な一体化ソナー・システムが提供される。船舶搭載可能な一体化システムは、少なくとも1つの画像ソナー・データ収集装置と、少なくとも1つの画像ソナー・データ収集装置に電気的、かつ取り外し可能に接続された少なくとも1つの処理システムとを含む。ソナー・データ収集装置は、好ましくは、処理システムに音響データを提供し、音響データを利用してソナー画像を生成する。また、システムは、関心のある標的の場所を突き止めるべく、データの正確な地理的に参照のためのデジタルのチルト及びアジマス方向を提供する。
(もっと読む)
移動プラットフォームから波の特性を判定するためのシステム及び方法
移動プラットフォームから1つ又は複数の波の特性を判定するシステム及び方法が開示される。超音波ドップラー式多層流向流速計のようなソナー・システムは、プラットフォームに対する水の動きをプロファイルすることができ、地球基準は、固定された地球基準に対するプラットフォームの動きの測度を求めることができる。水のプロファイルと地球基準測度との両方は、プラットフォームの動きを補償するために協働的に採用することができる。方向波スペクトルと非方向波スペクトルは、線形波理論により水面高さスペクトルに翻訳し、且つ有意な波の高さ、ピーク周期、及びピーク方向のような特性を計算するのに用いることができる。 (もっと読む)
標的像追尾装置、標的像追尾方法、および標的像追尾プログラム
【課題】標的像の認識率を向上させるとともに、標的追尾のための計算処理量が必要以上に増大することを防ぎ、標的追尾の成功率を向上させた標的像追尾装置を提供する。
【解決手段】標的像追尾装置が、探信波を送受信する送受波部3と、送受波部3が受信した反射波を画像フレームデータに変換するフレームデータ変換部4と、前記画像フレームデータを表示する表示部9と、標的像の抽出領域の位置を、前回の前記画像フレームデータにおいて抽出した最尤の標的像の絶対位置とし、前記抽出領域の寸法を、前記標的の最大速度と、前記探信波が送受信される周期と、に応じて設定する抽出領域設定部6と、前記抽出領域の前記標的像から最尤の標的像を抽出する標的像抽出部7と、前記最尤の標的像の相対位置を検出し、前記最尤の標的像の絶対位置を算出し、抽出領域設定部6に通知する標的像位置算出部8と、を備える。
(もっと読む)
水中航走体及び水中航走体の編隊航行方法
【課題】水深データベースが用意されていない領域についても航行効率を低下させずに、航跡検出精度を向上させること。
【解決手段】水深データベースが用意されていない領域においては、慣性航法装置及び対地速度計の計測値に基づいて現在位置を特定し、この現在位置を用いて航跡を生成し、水深データベースを有しない領域から水深データベースを有する領域に進入した場合に、水深データベースに基づいて検出された現在位置に基づいて、慣性航法装置及び対地速度計の計測値に基づいて現在位置を補正する。
(もっと読む)
合成開口ソーナー
【課題】送受波器の動揺を補正し、合成開口処理への影響を軽減した合成開口ソーナーを提供する。
【解決手段】基準位置情報20により、1台の送波器と1台の受波器からなる単一配列の基準位置間の伝搬距離を計算する理想単一配列伝搬距離計算器230と、1台の送波器と複数台の受波器からなる配列と基準位置間の伝搬距離を計算するDPCA配列伝搬距離計算器240と、理想単一配列伝搬距離計算器230とDPCA配列伝搬距離計算器240の出力の伝搬距離差から補正量を計算する補正量計算器220と、補正量に基づき受信信号に補正を施す動揺補正器210と、合成開口処理部300と表示制御部400を組み合わせ、動揺検出処理部500からくる動揺情報に基づきDPCA配列伝搬距離計算器240の出力に反映させて動揺補正を行う。
(もっと読む)
1 - 20 / 43
[ Back to top ]