
Fターム[5J083AG09]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 組合せ (299) | ソーナーと方探 (117) | ソーナーとGPS (72)
Fターム[5J083AG09]に分類される特許
1 - 20 / 72
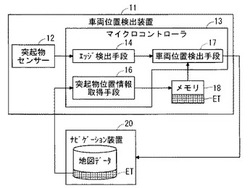
車両位置検出装置
【課題】本発明は、簡単な構成で精度良く車両の位置を検出する車両位置検出装置の提供を目的とする。
【解決手段】本発明の車両位置検出装置は、GPS電波による自車位置の測定を補助するための車両位置検出装置であって、車両に設置され、当該車両の上方における地物を感知する突起物センサー12と、道路上方の地物についての予めの調査結果に基づく情報を位置情報と紐付けた突起物位置情報を取得する突起物位置情報取得手段16と、突起物センサー12の感知結果と突起物位置情報との比較に基づき、車両の位置を検出する車両位置検出手段17と、を備える。
(もっと読む)
魚探映像表示装置、魚群探知装置、目的地指定プログラム、及び目的地指定方法

【課題】魚探映像を表示するとともに、過去に取得した魚探映像が示す位置を目的地とする自動操舵を簡単な操作で行わせることができる魚探映像表示装置を提供する。
【解決手段】タッチパネル装置(魚探映像表示装置)11は、記憶部23と、表示部21と、制御部25と、を備える。記憶部23は、魚群探知機14が水中を探知して得られる探知データと、当該探知データを取得した位置と、を対応付けて記憶する。表示部21は、探知データで構成される魚探映像を表示する。制御部25は、表示部が表示する映像に対する指定操作が行われた場合に、指定された部分を構成する探知データに対応する位置を求め、当該位置を目的地とする自動操舵を自動操舵装置16に行わせる。
(もっと読む)
魚群予測位置表示システム、水中探知装置、記憶装置、魚群予測装置、魚群予測位置表示プログラム、及び魚群予測位置表示方法
【課題】魚群の位置について精度の高い予測を行って表示する魚群予測位置表示システムを提供する。
【解決手段】魚群予測位置表示システムは、取得部81と、出力制御部82と、記憶部71と、魚群予測部74と、表示部と、を備える。取得部81は、魚群状況情報を取得する。出力制御部82は、取得部81が取得した魚群状況情報を記憶部71へ出力する。記憶部71は、出力制御部82が過去に出力した複数の魚群状況情報で構成されるデータベースを有する。魚群予測部74は、前記データベースに基づいて魚群予測位置を出力する。表示部は、魚群予測部が出力した魚群予測位置に基づく映像を表示する。出力制御部82が出力する魚群状況情報には、魚群を検出したときの情報と、魚群が検出できなかったときの情報と、が含まれる。魚群予測部84は、これらの情報の対比に基づいて魚群予測位置を出力する。
(もっと読む)
音響画像生成システム、音響画像生成方法、および音響画像生成プログラム
【課題】検知した水中音波に基づき水中目標物の正確な位置を示す音響画像を生成するシステムを提供する。
【解決手段】水中の反射音を捕捉する音響センサ部5とこの反射音に基づき水中の物体の位置を示す音響画像を生成する画像データ生成部とを備え、反響音の水平方向の指向性を示すビームを合成する指向性合成部10と、反射音を捕捉した受信時刻と各反響音ビームの指向性に基づき船舶からの方位および距離として特定される各地点における反響音のレベルを導出する信号強度導出部11と、各位置情報に対応して導出した異なる反響音のレベルを積分して得た値に色情報を割り当てて表示する表示器14を備えた。
(もっと読む)
水中探知装置、水中探知方法及びプログラム
【課題】所定レベル以上のエコー信号を取得できない場合でも、信頼性のある水深を取得することができる水中探知装置、水中探知方法及びプログラムを提供する。
【解決手段】送信された信号が水中で反射してなるエコー信号に基づいて、水深を検出する水中探知装置であって、自装置の位置を取得する。位置の水深を示す水深データを取得する。取得した位置及び取得した水深データに基づいて、検出すべき水深を推定する。エコー信号に基づく画像と、推定した水深とを表示する。
(もっと読む)
水中物体までの水平距離を算出するための水平距離算出システム及び水平距離算出方法
【課題】距離方向に音速プロファイルが変化しても、水中物体までの水平距離の算出誤差を低く抑え、かつ音波伝搬経路の観測誤差や音波伝搬中のゆらぎの影響を極力小さくする。
【解決手段】音速プロファイルに基づいて水中物体までの音波伝搬経路を算出する音波伝搬経路算出手段21と、水中物体までの音波伝搬時間を算出する音波伝搬時間算出手段22と、送信物体と受信物体の位置をそれぞれ測定する位置測定手段23と、送信物体及び受信物体の位置と音波伝搬時間算出手段22が算出した音波伝搬時間とに基づいて送信物体と受信物体との間の計測水平距離を算出する計測水平距離算出手段24と、計測水平距離に基づいて音波伝搬経路算出手段21が算出した音波伝搬経路を補正して補正後音波伝搬経路を生成する音波伝搬経路補正手段25とを備え、音波伝搬経路補正手段25が補正した補正後音波伝搬経路に基づいて水中物体までの水平距離を算出する。
(もっと読む)
残響フィルタ、アクティブソーナー装置、残響除去方法及び残響除去プログラム
【課題】 反射波から残響を高精度に除去できる残響フィルタ等を提供する。
【解決手段】 残響フィルタ10は、反射波のレベルLがレベル閾値Lthを越えたか否かを検出する反射波検出手段101と、反射波のレベルLがレベル閾値Lthを越えたことを反射波検出手段101が検出した場合に、反射波のレベルLがレベル閾値Lthを越え続ける継続時間Tを計測する継続時間計測手段102と、継続時間計測手段102で計測された継続時間Tが継続時間閾値Tthを越えたか否かを検出し、継続時間Tが継続時間閾値Tthを越えた反射波を残響であると判定し、継続時間Tが継続時間閾値Tthを越えない反射波を目標エコーであると判定する目標エコー判定手段103と、を備えたことを特徴とする。
(もっと読む)
水中位置探知システム、水中位置探知システムに用いられる超音波発信手段および船側受信手段、ならびに水中位置探知方法
【課題】母船から見たダイバーの3次元的な位置を正確に把握することを可能とする水中位置探知手段を提供する。
【解決手段】水中位置探知システム11は、ダイバーA側に取り付けられる超音波発信装置12から発信される超音波20を、船S側に設けられる船側受信装置13によって受信し、水中におけるダイバーAの位置を探知するためのシステムである。ここで、船側受信装置13は、複数の超音波マイクロフォン18を有する超音波受信装置21と、発信同期信号22Sと超音波信号との間の時間差τを出力する比較装置23と、比較装置23によって出力された時間差τに基づいて、ダイバーAと超音波マイクロフォン18との間の距離Lを計算する距離演算装置24と、距離Lに基づいてダイバーAの3次元座標を計算する座標演算装置25と、ダイバーAの座標を画像に表示する画像表示装置26とを有する。
(もっと読む)
底質判別装置、超音波探知機、パラメータ設定方法及びパラメータ設定プログラム
【課題】ニューラルネットワークを用いて、正解率の高い底質判別結果を得ることができる底質判別装置、超音波探知機、パラメータ設定方法及びパラメータ設定プログラムを提供する。
【解決手段】水中に出力された超音波に係るエコー信号を入力し、ニューラルネットワークを用いて底質判別処理部172で海底の底質判別を行う超音波探知機において、結合荷重記憶部174に、ニューラルネットワークで用いる結合荷重を、位置情報に対応付けて複数記憶する。結合荷重設定部173は、位置情報を受け付け、受け付けた位置情報に対応する結合荷重を、結合荷重記憶部174から取得し、取得した結合荷重を、底質判別処理部172のニューラルネットワークに設定する。
(もっと読む)
水中探知装置及び水中探知システム
【課題】他船の航跡からの反射信号に関わらず、魚群信号を識別容易に表示する。
【解決手段】スキャニングソナー10は、レーダ装置10から他船の位置の情報を継続して取得する。表示画像処理部134は、この他船の位置情報に所定の加工、すなわち輝点を表す画像信号に変換する処理を施す。変換された輝点画像は、航跡情報に沿って線状となり、探知画像に重畳されて表示部に導かれる。
(もっと読む)
海底音響映像システム
【課題】合成開口技術とインターフェロメトリ技術を用い、海底面及び海底面上、及び海底面下の物体の三次元画像を高分解能で生成可能な海底音響映像システムを提供する。
【解決手段】海中を航行するプラットフォーム60に取り付けられ、航行する方向に垂直な向きで海底面に第1探査波を照射する送波器72と、航行する方向に垂直な方向、且つ前記第1探査波の照射方向に交差する方向に配列され、反射波をそれぞれ受波する受波アレイ74と、反射波から合成開口処理情報を生成する合成開口演算処理部と、前記プラットフォーム60の位置情報を生成する慣性航法装置と、合成開口処理済みの反射波同士の位相差に基づいて反射波の到来角を算出するとともに、前記到来角と、前記位置情報と、に基づいて反射波の反射源の三次元の位置を算出するインターフェロメトリ演算部と、を有する。
(もっと読む)
機雷掃海システム
【課題】 機雷探知機において、目標物が含まれた信号から目標物信号成分を自動で検出するための信号処理装置と、目標物が含まれた信号を送信する水中音響通信装置を提供する。
【解決手段】 エコー信号に対してウェーブレットパケット変換を適用し周波数分解を行うことによって、目標物からのエコー信号成分が多く含まれていると予測されるものと、そうでないものとに分類する。そうでないものとされた信号成分はすべて0に置換し、また、予測された信号の主要な成分のみをさらに抽出し、その信号成分のみを用いて逆ウェーブレットパケット変換を行い、再構成を行う。これにより、予測信号の中に目標信号があればその成分だけ抽出することができる。さらに、前記手段で発見された目標物の付近の情報のみを音波を用いて転送する。目標物探知を精度良く行い、その結果のみを転送することにより、帯域に多大な制限を受ける水中音響通信においても、そのリアルタイムでの運用が現実的になる。
(もっと読む)
目標物探知システム、探知方法、及び探知情報処理プログラム
【課題】レーダ,ソナー,又はライダーから成る送受信機を備えた目標物探索システムにあって、S/N比が低く反射信号が雑音に埋設されそうな環境下にあっても、目標物を有効に捕捉することを可能とした目標物探知システムを提供すること。
【解決手段】方位設定が可能で異なる設置位置にそれぞれ配置された目標物探索用の少なくとも二個の送受信機1,2と、この各送受信機1,2により探索された目標物Mの方位にかかる反射情報に基づいて当該目標物Mの位置を特定する位置算出手段12を備えた主制御装置10とを設け、前記位置算出手段12が、前記二個の送受信機1,2によって得られた目標物Mの方位にかかる情報を、前記各送受信機1,2の位置情報を基準として重ね合わせ処理することにより前記目標物Mの位置を特定する機能を備えていることを特徴とする。
(もっと読む)
港湾構造物計測装置
【課題】水中部分と水上部分、及び両者の境界部分も連続的に測定できる港湾構造物計測装置を提供する。
【解決手段】陸上に設置されたGPS基準局11と、測定機器を搭載した曳航体12と、曳航体を測定水域に沿って曳航する曳航船13とから成り、GPS基準局は、衛星S1〜S3からの電波を受信するGPS受信機14とデータリンク装置15を備え、曳航体は、GPSアンテナと、モーションセンサーと、マルチビーム測探機ソナーヘッドと、レーザースキャナーとを搭載し、曳航船は、マルチビーム測探機プロセッサーと、データリンク装置との間で位置情報を授受するインターフェイスボックスと、インターフェイスボックス及びマルチビーム測探機プロセッサーと接続されたデータ収録装置と、レーザースキャナー及びインターフェイスボックスと接続された第2データ収録装置とを備え、水中部分と水上部分と共に、境界部分も連続的に測定する。
(もっと読む)
水中構造物点検システム及び画像処理装置
【課題】水中構造物の点検の作業効率を向上し、コストを抑制できる水中構造物点検システム及び画像処理装置を提供する。
【解決手段】造影された映像において船舶が移動することで生じる歪みを補正するため、当該海域で予め測定された音速と、映像に生じている歪みの大きさとに基づいて船舶の移動速度を推定し、当該推定した移動速度を用いて映像の歪みを補正し、当該補正された映像を出力する。
(もっと読む)
魚群探知装置
【課題】 従来の魚群探知機の表示では、縦方向スケールと横方向スケールの比率が一定ではなく、感覚的に表示画面が見にくいという点である。
【解決手段】 第1のメモリ10から読み出された反射波信号によって深度レンジデータ出力部17で深度レンジデータを作成し、第1のメモリ10から読み出された船速データ付き反射波信号は横尺計算部18に入力され、深度に応じた横尺が計算され、この計算値に応じて横尺の伸縮度が横尺伸縮部19で、表示装置16で表示される画像の横幅の伸縮度が計算され、第1のメモリ10から読み出された反射波信号は計算された伸縮度に応じて伸縮され、この伸縮された反射波信号は第2のメモリ20に入力され、第2のメモリ20から読み出された伸縮された反射波信号は伸縮画像作成部21に入力されて画像信号に変換され、表示装置16で図2のBで示された画面の水底Cは、図2の深度に応じて横尺度が一致され、図3の水底Dで示すように、深度と一致した横尺度に伸縮されるので、実際の地形に近い表示になる。
(もっと読む)
3次元探査装置
【課題】スキャニングソナーと同等の送信強度で探信波を送信しても、遠方の標的の位置及び量(魚量等)を、精度よく算出することができる3次元探査装置を提供する。
【解決手段】探信波を送信して当該探信波の反射波を受信する送受波部200から当該反射波の強度に応じた信号を取得し、探信波により探査される探査範囲における強度分布を含むボリュームデータを生成する3次元探査装置100において、3次元探査装置100が、設定された探査距離と、送受波部200が検出可能な反射波の最小値と、によって定まる値を超えないように、送受波部200が送信する探信波の立体角を制御する送受波制御部103を備える。
(もっと読む)
波動源位置演算方法及び波動源位置演算装置
【課題】外乱による影響を取り除き、波動源位置の演算精度を高めることができる波動源位置演算方法を提供する。
【解決手段】観測点において、波動源が放射する波動信号を検出し、当該波動源の位置を演算する波動源位置演算方法であって、波動信号を時間周波数の離散信号に変換する工程と、離散信号を用い、波動信号の振幅成分、波動信号の振幅の微分成分、または、波動信号の空間的な勾配の少なくとも一つのパラメータを含む式により、時間周波数毎に、波動源の位置を表す位置推定値を演算する位置推定値演算工程と、当該式を用いて表される評価関数に位置推定値を代入して、評価関数の値に応じて、時間周波数の帯域を制限するマスキング関数を設定するマスキング関数設定工程と、マスキング関数により時間周波数の帯域に制限をかけるマスキング工程と、位置推定値から波動源の位置を演算する波動源位置演算工程とを含む。
(もっと読む)
水中航走体の位置較正方法及び装置
【課題】 音響通信の速度が限られていても精度よく較正できるようにする。
【解決手段】 水中航走体6を、緯度方向位置検出用経路22と経度方向位置検出用経路23に沿って航走させながら、支援船7側より音響測位を行う。得られた音響測位位置D4の緯度成分と経度成分の代表値D5x,D5yのみを、音響通信を介して水中航走体6の水中航走体制御装置15へ与える。水中航走体制御装置15では、緯度方向と経度方向の各位置検出用経路22,23を航走したときに水中航走体6が自身で計測していた慣性航法位置d4の緯度成分と経度成分の代表値d5x、d5yを求め、これを支援船7側より与えられた音響測位位置D4の緯度成分と経度成分の代表値D5x,D5yより減算して緯度方向と経度方向の偏差δx,δyを求め、この緯度方向と経度方向の偏差δx,δyにより水中航走体6が自身で計測していた慣性航法位置d4を較正させる。
(もっと読む)
水中航走体の位置較正方法
【課題】 慣性航法位置の較正に要する音響測位回数及び水中航走体のエネルギー消費を低減させ、音響測位精度を向上させる。
【解決手段】 水中航走体6を、定点保持又は着底により海底21に対する相対位置変化を停止させる。この状態で、支援船7側からの音響測位を複数回行い、各計測結果における緯度方向の平均と経度方向の平均を求めて、水中航走体6の統計的に正しい緯度と経度を備えた音響測位位置を求める。又、水中航走体6自身による慣性航法に基づく測位を行い、その緯度及び経度について、音響測位位置の緯度及び経度と比較して、緯度方向と経度方向の偏差をそれぞれ求め、求められた緯度方向及び経度方向の偏差により、水中航走体6自身による慣性航法に基づく緯度と経度のデータを較正させる。更に、音響測位時に支援船7を水底付近に停止させた水中航走体6の鉛直線上付近に保持することで音響測位精度を向上させる。
(もっと読む)
1 - 20 / 72
[ Back to top ]