
Fターム[5J083BE24]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 受信信号処理 (1,335) | 受信信号の検出 (729) | 比較 (268) | 平均値と比較 (4)
Fターム[5J083BE24]に分類される特許
1 - 4 / 4
水中探知装置
【課題】ノイズのレベルに影響されることなく、対象物のエコーを確実に視認できる探知画像を生成する。
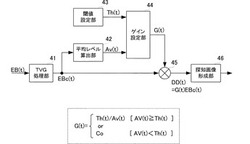
【解決手段】TVG処理部41は、受信信号EB(t)をTVG処理し、受信信号EBc(t)を生成する。平均レベル算出部42は、複数の受信信号EBc(t)における同一距離位置の方位方向に沿った各信号レベルの平均レベルAV(t)を算出する。閾値設定部43は、距離に応じた閾値Th(t)を設定する。ゲイン設定部44は、平均レベルAv(t)が閾値Th(t)以上であればゲインG(t)=Th(t)/Av(t)を設定し、平均レベルAv(t)が閾値Th(t)未満であればゲインG(t)=Coを設定する。乗算器45は、受信信号EBc(t)にゲインG(t)を乗算し、探知画像用信号DD(t)を生成する。探知画像形成部46は、探知画像用信号DD(t)の信号レベルに応じた階調表示の探知画像データを生成する。
(もっと読む)
位置検出装置、方法及びプログラム

【課題】必要な計算量が少なく、信頼性の高い測定結果を得ることができる位置検出装置を提供する。
【解決手段】装置は、各ランドマーク装置との距離の履歴に基づき、新たに測定した各ランドマーク装置との距離が異常であるか否かを判定する距離異常判定手段と、各ランドマーク装置の位置情報と、各ランドマーク装置との距離に基づき、カルマン・フィルタにより現在位置を求めて出力する位置判定手段とを備えており、位置判定手段は、新たに測定した第1のランドマーク装置との距離が異常である場合、新たに測定した第1のランドマーク装置との距離から、カルマン・フィルタによる、その予測値を引いた値が大きい程、小さくなる重み係数を算出し、算出した重み係数によりカルマン・ゲインを調整し、調整後のカルマン・ゲインにより現在位置を求める。
(もっと読む)
誤りのあるセンサ出力を特定するための方法及び装置
【課題】誤りのあるセンサ出力を特定するための方法及び装置を提供する。
【解決手段】誤りのあるセンサ出力を特定するための方法が提供される。本方法は、或る時間にわたって、センサから第1の複数のサンプルを得ることを含む。複数のサンプルの平均を求める。第1の複数のサンプルが得られた時刻より後の時刻においてセンサから第1のさらなるサンプルも受信する。第1のさらなるサンプルと平均との相違を求める。相違が或るしきい値よりも大きいときに、第1のさらなるサンプルを誤りがあると特定する。
(もっと読む)
車外音処理装置
【課題】さまざまな走行状態において、音響を発して接近する物体の検出が可能な車外音処理装置を提供する。
【解決手段】車外の音を収集するためのマイクロフォン1と、車両の状態を検出する車両状態検出部4と、マイクロフォン1で収集された音響信号を、収集されたときの車両状態に対応づけて蓄積する記憶部13と、車両の状態ごとに音響信号を所定の期間にわたって平均化した情報を車両の状態に対応づけて記憶する車両音−車両状態対比記憶部15と、車両走行時にマイクロフォン1で収集される音響信号と、音響信号が収集されたときの車両状態に対応する平均化された情報を比較する車両音比較部16と、車両走行時の音響信号とそのときの車両状態に対応する平均化された情報を比較した結果、車両走行時の音響信号が平均化された車両音より大きく、かつ逐次大きくなる場合に、車両に接近する物体があると判断する接近判定部17と、を備える。
(もっと読む)
1 - 4 / 4
[ Back to top ]