
Fターム[5J083BE53]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 受信信号処理 (1,335) | フィルタ手段 (199)
Fターム[5J083BE53]の下位に属するFターム
Fターム[5J083BE53]に分類される特許
1 - 20 / 117
移動体検出装置
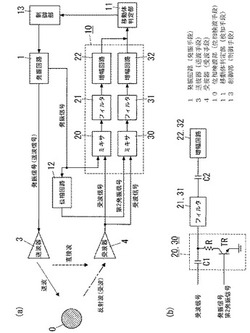
【課題】コスト上昇や大型化を抑制しつつ異常検出機能を追加する。
【解決手段】異常検出モードにおける制御部13は、発振信号を位相検波部10のみに入力させたときの位相検波部10の出力と、発振信号を送波器3と位相検波部10にそれぞれ入力させたときの位相検波部10の出力とを比較する。そして、各出力の信号レベルの変化(差分)が所定のしきい値を超えていれば、送波器3及び受波器4に異常なしと判断され、信号レベルの変化がしきい値未満であれば、送波器3又は受波器4に異常有りと判断される。したがって、従来例とは異なり、1種類の発振信号のみで異常発生の有無を検出することができるので、コスト上昇や大型化を抑制しつつ異常検出機能を追加することができる。
(もっと読む)
被検体情報取得装置、被検体情報取得方法、及びプログラム

【課題】 FDI法ならびに適応型信号処理を用いて処理した場合、走査線の隣接間で連続性が乏しい部分が生じる可能性がある。
【解決手段】 本発明の被検体情報取得装置は、被検体からの弾性波を受信し複数の受信信号に変換するための複数の変換素子と、前記複数の受信信号を用いて整相加算処理を行い、複数の走査線信号を出力する整相加算手段と、前記複数の走査線信号を隣接する走査線間で加算して複数の合成走査線信号を出力する走査線信号合成手段と、前記複数の合成走査線信号を用いて周波数領域干渉計法及び適応型信号処理を行い、電力強度分布を取得するFDI適応処理手段と、を有する。
(もっと読む)
水圏生物のモニタリング装置及び方法
【課題】水圏生物の複数の個体を,長期間にわたり,安定して,高い信頼性で追跡できるようにする。
【解決手段】モニタリング装置100は,水密構造の筐体120と,筐体120内に設けられ,第1及び第2の水中マイクから出力される第1及び第2の信号をそれぞれ第1及び第2のチャンネルに録音する録音のための電子回路144とを含む。電子回路144は,第1及び第2の信号の周波数帯域を,いずれも所定周波数だけ低域側にシフトさせ,周波数がシフトされた第1及び第2の信号をデジタル化し,それぞれ第1及び第2のチャンネルの信号としてハードディスク等に記録する。
(もっと読む)
物体検出装置
【課題】移動体に搭載した場合に、受信信号のSN比の向上を実現しながらも、検出対象とする物体の相対速度の範囲を当該移動体の速度に応じて変更することを可能にする物体検出装置を提供する。
【解決手段】移動体に搭載され、複数のパルスからなる複数のパルス列で構成される送信信号を発生するパルス発生器1と、パルス発生器1の発生する送信信号について、所定の符号系列に従って送信信号のパルス列毎にデジタル変調を施した変調信号を出力する信号変換器2と、信号変換器2の出力する変調信号を送信波として送波するとともに、その送信波の反射波を受波するマイク6と、マイク6で受波した反射波から得られる受信信号と前記変調信号との符号の相関値を求め、その結果により反射波から得られる受信信号をパルス圧縮するパルス圧縮手段とを備え、移動体の速度に応じて、信号変換器2において用いる符号系列の長さを変更する。
(もっと読む)
フーリエ変換でのサンプル数を削減した、短時間信号のピークパワースペクトルを検出する方法及び装置
【課題】測定対象とする時間範囲の分解能を高めつつ周波数分解能を高め、しかもフーリエ変換におけるサンプリング周波数を低くしてサンプル数を少なくし、演算量を減らす。
【解決手段】受信信号を変調器5によって周波数変換し、アナログフィルタ7を介して周波数変換後の信号をA/D変換器61によりオーバーサンプリングでデジタル信号に変換し、デジタルBPF62により所望の周波数帯域幅Δfpに相当する成分を抽出し、抽出された信号をダウンサンプリング部63により最低周波数帯域にダウンサンプリングする。その後、信号切り出しゲート11により、ダウンサンプリング部63からのデジタルデータ列を所望の時間幅内で切り出し、周波数分解能を満たすようにゼロ付加部12によってゼロデータを付加し、ゼロデータが付加されたデジタルデータ列に対しFFT処理部13によって高速フーリエ変換を行う。
(もっと読む)
短時間信号のピークパワースペクトルを検出する方法及び装置
【課題】フーリエ変換によるピークパワースペクトル検出において、測定対象とする時間範囲の分解能を高めつつ、周波数分解能を高める。
【解決手段】時間変化する信号における所望の時間幅の範囲内でのピークパワー周波数を検出する方法は、信号を所望の時間幅内においてサンプリングしてデジタルデータ列とするサンプリング段階と、必要とされる周波数分解能を満たすために高速フーリエ変換において必要なサンプル数を基準サンプル数として、基準サンプル数に達するように、デジタルデータ列にゼロデータを付加する付加段階と、ゼロデータが付加されたデジタルデータ列に対して高速フーリエ変換を行うFFT段階と、を有する。高速フーリエ変換の結果において最大値を示す周波数をピークパワー周波数として検出する。
(もっと読む)
物体検知装置
【課題】超音波振動子の残響振動が小さい場合でも残響振動の中に埋もれた反射波を検出し、近距離に存在する物体を検知することのできる物体検知装置を提供する。
【解決手段】物体A1に超音波を送波して物体A1で反射した反射波を受波する超音波振動子1と、超音波振動子1を第1の周波数f1で駆動させた後に第1の周波数f1とは異なる第2の周波数f2で超音波振動子1を駆動させる駆動部2及び制御部3と、第1の周波数f1と第2の周波数f2との差分に基づくビート信号を検波する包絡線検波部7と、包絡線検波部7の出力に基づいて物体A1を検知する信号処理部8とを備えた。
(もっと読む)
物体検知装置
【課題】コストを増大することなく極近距離に存在する物体を検知することのできる物体検知装置を提供する。
【解決手段】超音波を送受波する超音波振動子1と、物体A1からの反射波の受波に要する時間に基づいて近距離及び遠距離の物体A1を検知する第1のゲート期間G1及び第2のゲート期間G2を設定する制御部4とを備え、制御部4は、両ゲート期間G1,G2で反射波を受波した状態から第2のゲート期間G2のみで反射波を受波する状態に移行すると、第1のゲート期間G1で検知する位置よりも近い位置に物体A1が存在すると判定する。
(もっと読む)
画像表示装置及び画像表示装置に用いる集音手段
【課題】超音波の到来方向の検出に有益な集音手段、超音波を発する音源位置を特定し可視化した画像表示装置を提供する。
【解決手段】カメラの撮像画像を表示する表示手段と、少なくとも2つのマイクロフォンM3、M4を有する集音手段15と、音源が発する超音波が少なくとも2つのマイクロフォンに到達する時間差に基づき音源位置を算出する音源位置算出手段と、表示手段に表示された撮像画像内に音源位置を識別する画像を表示する制御を行う表示制御手段とを備えた画像表示装置で、集音手段は、少なくとも2つのマイクロフォンをそれぞれ覆い、基端C、Dを閉塞して先端に各マイクロフォンの集音方向へ開口する集音孔H3、H4を形成し、基端から先端に向けて先細りする形状の筒状部材17C、17Dを有し、少なくとも2つの筒状部材を、先端が互いに接近するように配置することで、集音孔同士の間隔Yを超音波の半波長未満にした。
(もっと読む)
超音波を用いた波浪計測方法および波浪計測システム
【課題】波浪が高い場合でも、精度良く計測し得る超音波を用いた波浪計測方法を提供する。
【解決手段】海面に配置された海洋構造物1及びブイ3の海面下に設けられた第1,第2超音波送受信機2,4から海中に超音波を発信し、海面下に配置された3つの音波中継器5からの超音波を受信し、超音波の片道伝播時間に基づき音波中継器と両超音波送受信機との間の距離をそれぞれ検出すると共に両距離データの差を求め、この差にハイパスフィルタ処理を施して短周期変動成分を抽出し、超音波送受信機の音波中継器に対する方位角及び俯角を係数とする両超音波送受信機間の相対変位ベクトルの三次元座標軸の変位を未知数とする式が上記抽出された短周期変動成分に等しくなるようにした三元一次方程式を各音波中継器毎に作成し、この三元一次連立方程式を解いて短周期変動成分の高さ方向の変位を求めて波浪高さを得る方法である。
(もっと読む)
受信時間の検出方法
【課題】信号の振幅が異なっていても、受信信号の所定の角度位置を検出点とすることができる、受信時間の検出方法を得る。
【解決手段】受信した信号を1周期の4倍以上の整数倍のサンプリング周波数でサンプリングする。隣接する角度位置にある2つのサンプリング位置におけるサンプリング値を比較して、信号の波形の立上り部分を検出する。立上り部分における2つのサンプリング値の差の絶対値を比較して、最も振幅の大きい部分における立上り部分のゼロクロス位置を検出する。
(もっと読む)
物標探知装置及び物標探知方法
【課題】単体魚等の物標を高精度で検出する。
【解決手段】単体魚の検出を行う水中探知装置10は、受信信号に対し、所定期間毎にその期間内の最大値を抽出するマックスピークホールド部1611と、受信信号に対し、所定期間毎にその期間内の最小値を抽出するミニピークホールド部1612と、互いに異なるピークホールド位置で抽出された最小値と最大値との間の勾配を用いて単体魚を示す信号の立ち上がり及びその立ち下がりを判定する単体魚一次検出処理部162とを備えている。
(もっと読む)
相関検出のための半導体デバイスおよびその形成方法
【課題】クロストークおよび他の妨害の発生を防止し、距離測定の信頼性を向上させる。
【解決手段】一実施例に従って、半導体デバイスは、受信信号を既知のパターンと相関させる。相関出力は、信頼基準レベルを形成するための基準として使用される。この信頼基準レベルおよび相関出力は、受信信号の現在の信号状態が既知のパターンを含むことを示す受信信号におけるピークを識別するために、比較される。
(もっと読む)
機雷掃海システム
【課題】 機雷探知機において、目標物が含まれた信号から目標物信号成分を自動で検出するための信号処理装置と、目標物が含まれた信号を送信する水中音響通信装置を提供する。
【解決手段】 エコー信号に対してウェーブレットパケット変換を適用し周波数分解を行うことによって、目標物からのエコー信号成分が多く含まれていると予測されるものと、そうでないものとに分類する。そうでないものとされた信号成分はすべて0に置換し、また、予測された信号の主要な成分のみをさらに抽出し、その信号成分のみを用いて逆ウェーブレットパケット変換を行い、再構成を行う。これにより、予測信号の中に目標信号があればその成分だけ抽出することができる。さらに、前記手段で発見された目標物の付近の情報のみを音波を用いて転送する。目標物探知を精度良く行い、その結果のみを転送することにより、帯域に多大な制限を受ける水中音響通信においても、そのリアルタイムでの運用が現実的になる。
(もっと読む)
ビームフォーミング装置用フィルタの作成方法およびビームフォーミング装置用フィルタの作成装置
【課題】低周波でも高精度に音源発生位置の検出できるビームフォーミング装置用フィルタの作成方法を提供する。
【発明の効果】仮想音源位置からマイクロホンまでの距離と音源の周波数に基づいて複数の仮想音源位置からマイクロホンまでの各伝達関数を計算する伝達関数計算段階(S504)と、目的方向の仮想音源位置からマイクロホンまでの伝達関数が互いの位相を合わせるようにフィルタでそれぞれ演算処理され互いに加算されて得られる第一伝達関数和から、非目的方向の仮想音源位置からマイクロホンまでの各伝達関数がフィルタでそれぞれ演算処理され互いに加算されて得られる第二伝達関数和または前記第二伝達関数和の絶対値のいずれかを差し引いた値が0より大きくなるようにフィルタが構成されてなるフィルタ群を作成するフィルタ群作成段階(S504)と、を有する。
(もっと読む)
水中探知装置及び水中探知方法
【課題】より確実、且つ、より精度良く魚の追尾を行うことができる水中探知装置および方法を実現する。
【解決手段】送受波器10で得られた魚Fiのエコー信号に基づく受信信号をマッチドフィルタ処理することで、パルス圧縮した検出信号を得る。対象の魚Fiの観測位置および加速度を算出する。算出した加速度に基づいて、誤差共分散を設定する。設定した誤差共分散と、算出した観測位置とを、拡張カルマンフィルタに代入し、魚Fiの推定位置を算出する。
(もっと読む)
音源方向推定装置
【課題】無指向性のマイクロフォンを用いた場合でも音源の方向を推定することができる音源方向推定装置を提供する。
【解決手段】本発明に係る音源方向推定装置20では、第1筺体10aの外部の音源で生じた音を各開口11〜14を通じて第1筺体10a内に取り込み、第1筺体10a内に埋設した各マイク1〜4により、第1筺体10a内に伝搬した音を電気信号に変換し、各マイク1〜4から出力された電気信号のうち2.5kHz以上の周波数成分をHPF21により通過させ、音源の位置する角度との高い相関関係を有する帯域の周波数成分を抽出し、音源方向演算部23によって、HPF21を通過した周波数成分に基づいて音源の方向を推定し、各マイク1〜4が無指向性であっても音源の方向を推定可能とする。
(もっと読む)
探知装置
【課題】分解能が低下するのを抑制しながら、グレーティングローブを低減することが可能な探知装置を提供する。
【解決手段】水中探知装置は、複数の振動子と、複数の振動子により受信した受信信号に基づいて、ビームBl1を形成する第1ビーム形成部と、複数の振動子により受信した受信信号に基づいて、ビームBl2を形成する第2ビーム形成部と、ビームBl1とビームBl2とを最小値合成することにより、受信ビームBl3を算出する算出部とを備える。
(もっと読む)
パーティクルフィルタリングによる移動ロボットからの2次元音源地図作成方法
【課題】移動ロボット本体だけで断続的に取得したセンサデータをもとに方位単独SLAMを行うことができる2次元音源地図作成方法を提供する。
【解決手段】移動ロボットに搭載された遅延和ビームフォーミング法により最適化されたマイクアレイにより音源からの音声データを断続的に取得し、取得した音声データに対し、周波数帯域選択法を利用したパーティクルフィルタリングにより、方位単独SLAM(Bearing only Simultaneous Localization and Mapping)を行い、2次元音源地図を作成することを特徴とする。
(もっと読む)
移動物体検出装置
【課題】監視空間を広げることで死角を少なくした移動物体検出装置を提供する。
【解決手段】第1及び第2のミキサ信号発生回路4,5は、送波信号発生回路3から出力される送波信号E02と同周波数で、互いに位相が異なる基準信号Ea,Ebを出力する。位相検波回路6は、送受波器2から出力される受波信号Einを基準信号Ea,Ebと混合することで、基準信号Ea,Ebとの位相差に応じた振幅を有し且つ互いに位相の異なる一対のドップラー信号E1,E2を出力する。送波信号発生回路3と第1及び第2のミキサ信号発生回路4,5は、送波信号E02により送受波器2に駆動電源が供給される期間と、位相検波回路6により基準信号Ea,Ebと受波信号Einとが混合されて受波信号Einが出力される期間とが時間軸上で重ならないように、送波信号E02と基準信号Ea,Ebとの位相をずらして生成する。
(もっと読む)
1 - 20 / 117
[ Back to top ]