
Fターム[5J083CA07]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 送受波器(センサ) (1,888) | 受波器のみ (84)
Fターム[5J083CA07]の下位に属するFターム
水中聴音器 (17)
Fターム[5J083CA07]に分類される特許
1 - 20 / 67
位置推定装置、位置推定方法、プログラムおよび位置推定システム
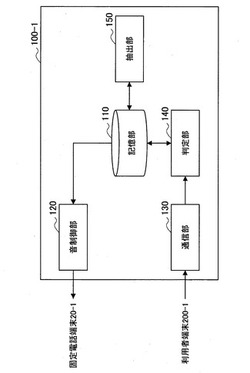
【課題】屋内にいる利用者の位置推定を精度よくかつ低コストで実現することを可能にする。
【解決手段】位置推定装置は、位置情報と音特性との対応関係を記憶する記憶部110と、集音器による集音結果から判定される音特性に対応する位置情報を前記記憶部から抽出する抽出部150と、固定電話端末に対して区画に設置された機器が発する区画識別音を制御する音制御部120と、利用者端末と通信を行う通信部130と、利用者端末の集音器による集音結果から区画識別音の音特性を判定する判定部140と、を備える。
(もっと読む)
ソーナー装置及びその指向性合成方法

【課題】ソーナー装置において、受波器数の増加を抑え、垂直方向に対する感度を抑えつつ、音響信号の到来方向を知ることができるようにする。
【解決手段】オムニ指向特性の第1の受波器とダイポール指向特性の第2及び第3の受波器を用い、第2及び第3の受波器の最大感度軸を基準面内にあって相互に直交させる。第1乃至第3の受波器からの受波信号により、基準面内の所定の方向に対して最大感度となり、基準面内で所定の方向とは反対方向に対してヌル感度となり、基準面に垂直な方向に対して感度を有する指向性パターンの第1の信号を形成し、第2及び第3の受波器からの受波信号により、基準面内の各方向に対して一様な最大感度を有し、基準面に直交する方向に対してヌル感度となる指向性パターンで第2の信号を形成し、第1の信号と第2の信号との乗算結果またはその平方根をもって検出結果を表す信号とする。
(もっと読む)
音源位置推定装置、音源位置推定方法および音源位置推定プログラム
【課題】マイク数および演算量を増やすことなく、騒音環境において音源の発する音の到来方向を推定する精度を向上させる。
【解決手段】音源位置推定部3は、受音点1,2から入力した各観測音を用いて、音源位置がある地点に存在する尤度を算出する。音源位置補正部5は、予め与えられた事前分布4、または音源位置推定部3が過去に算出した尤度から推定した事前分布4を用いて、音源位置推定部3が算出した現在の音源位置の尤度を補正して、音源位置を定位する。
(もっと読む)
音源推定方法及び音源推定装置
【課題】観測点で採取した音の音圧信号と映像信号とから音源を推定するとともに、推定された音源と観測点との距離をリアルタイムで算出する。
【解決手段】マイクロフォンM1〜M5とカメラとを備えた音・映像採取ユニットを第1の観測点P1に配置して音圧信号と映像信号とを採取し、マイクロフォンM6〜M9を備えた音採取ユニットを第2の観測点P2に配置して音圧信号を採取し、これらの音圧信号をA/D変換した音圧波形データを用いて推定した第1の観測点P1からみた音源方向の水平角θ1及び仰角φ1と第2の観測点P2からみた音源方向の水平角θ2とから第1の観測点P1と音源との距離Lを求めるとともに、第1の観測点P1で採取した映像信号をA/D変換した画像データと水平角θ1と仰角φ1とを用いて作成した画像中に音源の方向を示す図形が描画された音源推定用画像Gkと距離Lのデータとを表示画面に表示するようにした。
(もっと読む)
死角車両検知システム、死角車両検知装置、死角車両検知方法およびそのプログラム
【課題】死角車両の音源の方向を正確に検知する。
【解決手段】自車両に配置され、車外音を集音する集音部102と、死角車両の回折音の音圧が死角車両の反射音の音圧より大きくなる音圧閾値を保持しており、集音部102で集音された車外音の音圧が音圧閾値より大きいか否かを判定する音圧閾値処理部103と、音圧閾値処理部103で車外音の音圧が音圧閾値より大きいと判定された場合に、集音部102で集音された車外音から、死角車両の音源の方向を検知する車両検知部105と、を備える。
(もっと読む)
指定領域からの伝播音の再生方法とその装置
【課題】所定の観測点で計測した音源データを用いて指定された領域からの伝播音を短時間でかつ容易に再生する。
【解決手段】音源推定装置を用いて求めた音源データを用いて、観測点から見た水平角θと仰角φとを座標軸としたマップ上に音源方向と音圧信号の大きさとを周波数毎に表示した音源マップを作成した後、音源マップを複数の空間領域Gm,nに分割し、各空間領域Gm,nの周波数毎の音圧信号の大きさからバンドパワー値pm,n(Fk)をそれぞれ算出するとともに、バンドパワー値の比であるパワー比Rm,n(Fk)を求め、このパワー比Rm,n(Fk)とオクターブバンドパスフィルターに音圧信号を通して得られたオクターブバンド毎のバンドパスの音の大きさA(Fk)とを用いてバンドパワー値pm,n(Fk)を補正し、補正されたバンドパワー値Pm,n(Fk)を用いて、指定領域GM,Nから伝播される音の音圧波形を再生するようにした。
(もっと読む)
砲撃体検出装置、砲撃体検出方法及び砲撃体検出プログラム
【課題】個人が携行可能な小型の砲撃体検出装置を提供する。
【解決手段】衝撃波検出手段(音響センサ3)により、砲撃体1から発射された飛翔体2(銃弾)が発生する衝撃波wの音圧が3次元方向で検出され、音圧検出信号uが出力される。砲撃体方位算出手段(処理装置4)により、衝撃波検出手段(音響センサ3)から出力された音圧検出信号uに基づいて、同衝撃波検出手段(音響センサ3)の位置を基準とする砲撃体1の推定方位ndが算出されて方位情報pが生成される。
(もっと読む)
受信機システム、受信機システムの配置方法、および受信機システムを備える位置決めシステム
【課題】 位置決め用受信機システム、受信機システムの配置方法、および受信機システムを備える位置決めシステムを提供する。
【解決手段】 受信機システムは、測距信号を受信するための受信ノードから成るノード群を備え、ノード群の受信ノードは、予め定められた形態で配置され、ノード群が基準ノードを含み、ノード群内の他の受信ノードの位置を、予め定められた形態に関する情報と前記基準ノードの位置とに基づいて決定する。この受信機システムによれば、実用用途において遭遇される複雑な状況への適合性に優れた、従来よりも柔軟な構造とすることができる。同時に、複雑な適用状況下での較正の作業負荷も大幅に軽減される。
(もっと読む)
車両方向特定装置、車両方向特定方法、及びそのプログラム
【課題】風切り音などの雑音によって車両音が埋れてしまう状況下でも、車両の存在する方向を特定する。
【解決手段】各々が、接続された検知用マイク101、102で取得された他車両音と雑音との混合音と、検知用マイク101、102の各々で取得される風雑音よりも低い音圧の風雑音が取得される位置に設置された参照用マイク103で取得された他車両音のフィルタ通過後の音信号との差が最小になるようにフィルタを生成しながら、参照用マイク103で取得された他車両音のフィルタ通過後の音信号を算出することにより、検知用マイク101、102で取得された他車両音が強調された音を抽出する複数の他車両音強調フィルタ部104、105と、複数の他車両音強調フィルタ部104、105で抽出された音の到達時間差又は音圧差から、自車両の進行方向に対する他車両が存在する方向を特定する他車両方向特定部108とを備える。
(もっと読む)
音源推定用画像の表示方法とその装置
【課題】音の情報と映像の情報とを採取しながら、映像中に推定した音源方向を表示した音源推定用画像を作成して表示することのできる方法とその装置を提供する。
【解決手段】マイクロフォンM1〜M5とカメラ12とを一体化した音・映像採取ユニット10を用いて採取した音圧信号と映像信号とをA/D変換した音圧波形データ及び画像データをバッファ31に一時保存するとともに、バッファ31から予め指定されたサンプル数の音圧波形データを順次取り出して音源方向の推定を行った後、バッファ31から音源方向の推定に使用した音圧波形データに対応する画像データを取り出し、音源方向のデータと画像データとを合成して、画像中に音源方向を示す図形が描画された音源推定用画像Gを作成して表示装置40の表示画面40Mに表示し、しかる後に、音源推定用画像Gの作成に用いられた音圧波形データと画像データとを消去するようにした。
(もっと読む)
音源位置推定装置
【課題】到来時間差観測値に誤差がある場合にも、音源位置の推定誤差を小さくする。
【解決手段】到来ふ仰角が上向きのマルチパス波と到来ふ仰角が下向きのマルチパス波について別個に到来時間差のテーブル値を記憶しておき(209M)、受信したマルチパス波の各々について到来ふ仰角が上向きか下向きかの判定を行い、観測された到来時間差とテーブル値との不一致度を上向きのふ仰角を有するマルチパス波と下向きのふ仰角を有するマルチパス波の各々について別個に算出して、その和をコスト関数として(210)、音源位置の推定を行う(211)。
(もっと読む)
音の到来方向判定システム及びプログラム
【課題】正しく推定された音の到来方向と正しく推定できなかった音の到来方向とを識別可能に表示する。
【解決手段】音の到来方向判定システム100は、測定ユニット10の各マイクロフォンへの音の到達時間差から、パーソナルコンピュータ20の演算処理部23の音源位置推定部24により音の到来方向を推定する。虚音源位置判定部25は、推定された音の到来方向の信憑性を判定する。表示処理部26は、信憑性が低いと判定された音源位置と信憑性が高いと判定された音源位置をディスプレイ29上に識別可能に同時に表示する。
(もっと読む)
受信波の波源位置推定装置及び波源方向推定装置、並びに受信波の波源位置推定方法及び波源方向推定方法
【課題】近傍波源の受信波の場合に、計算負荷を低減しつつ、推定精度の劣化が抑制された波源位置推定装置を提供する。
【解決手段】波源位置推定装置は、アレーアンテナ24aにより電波又は音波を受信して受信波の波源の位置を推定する。波源位置推定装置は、各受信素子が受信した受信波の入力ベクトルを算出し、代数的手法を用いた波源の位置算出の際に近傍波源の位置特定を可能とする変換行列を算出し、前記入力ベクトルと前記変換行列とを基に代数的手法によって波源の位置を算出する。
(もっと読む)
砲撃体位置明確化のためのシステムおよび方法
【課題】超音速飛翔体の砲撃体を位置決めするための方法を提供する。
【解決手段】方法はアンテナを形成する5以上の間隔をあけた音響センサにより、衝撃波単独信号を計測し、かつタイミングエラー分布を推定し、単独信号から、センサ対に到着する時間差を、信頼度に基づいて決定することにより、飛翔体軌跡を得る。
(もっと読む)
音源方向検出装置及び音源方向検出方法
【課題】従来よりも簡易な構成で、音源が存在する方向を検出できる音源方向検出装置及び音源方向検出方法を提供する。
【解決手段】音源5から出力される音波の各周波数毎に指向性を変化させると共に、各周波数毎に音波の強度を検知する音響センサ2を備え、当該音響センサ2で検知された各周波数毎の検知結果の出力比と、音源5の方向との関係を表した参照情報T100を記憶部3dに予め保持しておくようにした。また、音源方向検出装置では、音源5の方向を検出する際に、算出部3aで算出された出力比に対応した角度を、参照情報T100から推定角度として読み出すようにした。これにより音響センサ2に設けられた1つの音圧検知部4によって音源5の方向を検出できることから、従来のように音源5から発せられる音波を検出するための電子部品たるセンサを複数個設ける必要がなく、その分だけ従来よりも簡易な構成にできる。
(もっと読む)
人工物検出システム、該システムに用いられる人工物検出方法及び人工物検出制御プログラム
【課題】広範囲の海底や水底に存在する人工物を、埋没している場合も含めて一度に効率良く検出することが可能な人工物検出システムを提供する。
【解決手段】海底又は水底Bに配置されている人工地震発生手段(たとえば、人工地震の震源11)により、人工地震が発生し、海中又は水中に配置されている振動波検出手段(たとえば、振動センサ12)により、人工地震により発生する音波が検出されると共に、同音波よりも速い伝搬速度で地震波qwを伝搬する海底又は水底Bから海中又は水中に放射される振動波が検出される。そして、人工物存在判定手段(たとえば、データ処理装置13)により、振動センサ12で検出される振動波のレベルが相対的に高くなるとき、同振動波の到来方位が検出され、同到来方位の海底又は水底Bに人工物HWが存在することが判定される。
(もっと読む)
周辺視野を有するセンサ、センサユニット、およびセンサの製造方法
【課題】保持部に対して浅い仰角方向から到来する波動(すなわち、周辺視野)をも検知し、広い方位角範囲で検知対象を非接触で検出することが可能なセンサ、センサユニット、及びセンサの製造方法を提供する。
【解決手段】検知対象を非接触で検出するセンサ100であって、検知対象から到来する波動を検知する検知素子102と、検知素子102の第1端102a側を保持する保持部104とを備え、検知素子102の第2端102b側は、保持部から離間する方向に変位している。
(もっと読む)
音源・振動源の探査方法と音源・振動源探査システム
【課題】音と振動とが同時に観測されたときに、観測された音が観測された振動源の発生する音かどうかを判別することのできる方法とそのシステムを提供する。
【解決手段】マイクロフォンM1〜M5を備えた音圧レベル測定手段11と、振動センサG1〜G4を備えた振動レベル測定手段12とを用いて、音源から伝搬する音と振動源から伝搬する表面波の振動とを同時に測定して、上記音の音圧レベルのデータから得られた音源方向の水平角θと上記振動の振動レベルのデータから得られた振動源方向の水平角θ’の方向とを比較して、観測された音が、音の発生を伴う振動源からの音であるか、あるいは、振動を伴わない音源からの音であるかの判定や、振動源が音を伴わない振動源であるかどうかの判定を的確に行うができるようにした。
(もっと読む)
発話向き推定装置、方法及びプログラム
【課題】多数のマイクロホンを発話者を囲い込むように配置する必要が無く、かつ残響時間が長い環境下においても適切に発話向きを推定することが可能な、発話向き推定装置を提供する。
【解決手段】複数のマイクロホンから構成されたマイクロホンアレイの周囲で発話者が発話した音声信号を当該複数のマイクロホンで収音し、各マイクロホンで収音した音声信号間の相関を表す相関行列を生成して、この相関行列を固有値行列と固有ベクトル行列とに分解することにより得られた固有ベクトルから、発話者が上記マイクロホンアレイに対しどのような向きで発話したかを推定する。
(もっと読む)
アレイ型センサの校正システム、方法及びプログラム
【課題】脱着可能な複数のセンサを備えるシステムにおいてセンサの配置を変更した場合であっても適切に信号処理の内容を校正することを可能にする。
【解決手段】センサユニット2が備えるセンサ部品、ステレオカメラユニット3が備える装着型ビデオカメラは、いずれも個別に脱着可能な部品として構成されている。また、センサ部品の構成情報を取得する配置情報取得手段31と、取得した構成情報に応じて信号処理の内容を変更する信号処理制御手段32と、を有する。
(もっと読む)
1 - 20 / 67
[ Back to top ]