
Fターム[5J083CA11]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 送受波器(センサ) (1,888) | 構成 (537)
Fターム[5J083CA11]の下位に属するFターム
アレイ(ラインアレイ、リニアアレイ) (300)
マトリックス (112)
Fターム[5J083CA11]に分類される特許
1 - 20 / 125
キーレスシステム
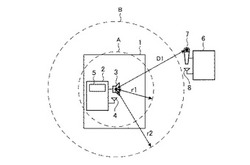
【課題】多数の車内アンテナや車外アンテナを必要とせず、より低コストにより近傍領域判定および車内外領域判定を実施することが可能なキーレスシステムを提供する。
【解決手段】車載機は電波を放射する第1のアンテナと、音波を放射するスピーカと、車とユーザの距離を算出する制御部とを備え、携帯機は第1のアンテナにより放射された電波を受信する第2のアンテナと、スピーカにより放射された音波を受信するマイクとを備え、車載機の制御部は第2のアンテナが第1のアンテナにより放射された電波を受信した電波受信時間およびマイクがスピーカにより放射された音波を受信した音波受信時間とに基づき車とユーザの距離を算出し、算出した車とユーザの距離に基づき携帯機が車内領域、車外近傍領域または車から離れた領域のいずれにあるかを判定するように構成したので、必要な部品数を減らすことが可能となる。
(もっと読む)
超音波放射に基づく位置検出

【課題】 対象物の位置を検出する。
【解決手段】 座標系に対する対象の配置を決定するための装置は該対象の周辺の電磁場を発生する少なくとも1つの電磁場発生器と該対象に固定される少なくとも1つの変換器とを含んでいる。該少なくとも1つの変換器は予め決められた振動周波数で振動しそれと該電磁場との相互作用に応じて、エネルギーを放射する。該変換器により放射される該エネルギーを検出しそれに応答して信号を発生するために該対象の周辺で1つ以上の検出器も使用される。
(もっと読む)
車両用物体認識装置
【課題】指向性の低い超音波センサを用いても、複雑な形状を有する物体の形状認識の精度を高めることができる車両用物体形状認識装置を提供する。
【解決手段】車両用物体形状認識装置1の物体形状推定部8により、物体の位置を示す距離点を超音波センサ2,3による検出距離で、照射範囲を横断した扇状の水平面の自車両の前方側臨界線近辺の対象線上の検出点および後方側臨界線近辺の対象線上の検出点のうち少なくともいずれかに設定し、自車両の移動に伴い繰り返し検出される検出距離のうち、超音波センサ2,3による自車両からの距離を検出する時刻およびその所定時間だけ前後の時刻における検出距離に基づき、各時刻の検出距離が自車両に近づくときは距離点を前方側の検出点に設定し、遠ざかるときは後方側の検出点に設定し、設定された距離点を繋ぎ合わせた形状を物体の形状と認識する。
(もっと読む)
音源位置推定装置、音源位置推定方法および音源位置推定プログラム
【課題】マイク数および演算量を増やすことなく、騒音環境において音源の発する音の到来方向を推定する精度を向上させる。
【解決手段】音源位置推定部3は、受音点1,2から入力した各観測音を用いて、音源位置がある地点に存在する尤度を算出する。音源位置補正部5は、予め与えられた事前分布4、または音源位置推定部3が過去に算出した尤度から推定した事前分布4を用いて、音源位置推定部3が算出した現在の音源位置の尤度を補正して、音源位置を定位する。
(もっと読む)
面で囲まれる容器の内壁面での検査作業結果と作業位置の特定方法及び情報管理方法
【課題】ボイラ火炉等の面で囲まれる容器の内部の検査に用い、基準点を決定することが容易であり、しかも特定する検査位置が大型の容器内であっても簡単に位置を特定することができ、検査と検査位置特定を同時に行うことができる面で囲まれる容器の内壁面での検査作業結果と作業位置の特定方法を提供する。
【解決手段】面で囲まれる容器の内壁面での検査作業結果と作業位置の特定方法であって、前記内壁面上の位置座標既知の箇所に音波を異なる2箇所以上から発信可能な発信器を配置し、作業者が携帯可能であって、前記音波を受信可能な受波器及び前記検査が可能な検査具が一体となった一体物を、前記検査作業を行う位置に配置し、前記検査具を用いて前記検査作業結果を得るとともに、前記発信器の2箇所以上より音波を発信し、前記2箇所以上から発信された音波それぞれが、前記受波器に到達する時間を計測し、前記到達時間と、前記2箇所以上の音波の発信箇所の位置座標を用いて、前記受波器の位置座標を特定する。
(もっと読む)
指定領域からの伝播音の再生方法とその装置
【課題】所定の観測点で計測した音源データを用いて指定された領域からの伝播音を短時間でかつ容易に再生する。
【解決手段】音源推定装置を用いて求めた音源データを用いて、観測点から見た水平角θと仰角φとを座標軸としたマップ上に音源方向と音圧信号の大きさとを周波数毎に表示した音源マップを作成した後、音源マップを複数の空間領域Gm,nに分割し、各空間領域Gm,nの周波数毎の音圧信号の大きさからバンドパワー値pm,n(Fk)をそれぞれ算出するとともに、バンドパワー値の比であるパワー比Rm,n(Fk)を求め、このパワー比Rm,n(Fk)とオクターブバンドパスフィルターに音圧信号を通して得られたオクターブバンド毎のバンドパスの音の大きさA(Fk)とを用いてバンドパワー値pm,n(Fk)を補正し、補正されたバンドパワー値Pm,n(Fk)を用いて、指定領域GM,Nから伝播される音の音圧波形を再生するようにした。
(もっと読む)
超音波測定用プローブの位置検出方法およびその位置検出装置
【課題】超音波測定用プローブ位置の誤検出を防止することができる超音波測定用プローブの位置検出方法およびその位置検出装置を提供すること。
【解決手段】超音波測定用プローブ1の位置に設けられ、超音波測定用プローブ1の位置から2種類の伝搬速度が異なる波動である赤外線および超音波を同時または所定間隔をおいて送波する赤外線送波器11および超音波送波器10と、予め既知の位置に所定の間隔Lを隔てて配置され、前記送波された各波動を受波する複数の受波器15a,15bと、各受波器15a,15bが検出した前記2種類の波動の到達時間差をもとに超音波測定用プローブの位置を検出する演算処理回路と、を備える。
(もっと読む)
波源推定装置及び波源推定方法
【課題】コヒーレント波である受信波を推定するとともに、演算負荷を低減できる波源推定装置を提供する。
【解決手段】波源推定装置は、アレーアンテナ24aにより電波又は音波を受信して受信波の波源の位置を推定する。波源推定装置は、波源の初期推定を行い、初期推定に基づく受信波のモード行列の位相を回転して変換行列を求め、受信波の相関行列を変換行列によって平均化し、波源演算に必要な相関行列を算出する。そして、波源推定装置は、演算過程で算出した変換行列と、先に算出された平均化処理後の相関行列とを基に代数的手法によって波源の位置を算出する。
(もっと読む)
フェーズドアレイ型ドップラーソーダーシステム
【課題】上空の任意の位置での風向・風速値を十分な空間分解能と精度で得ることができるドップラーソーダーシステムを提供する。
【解決手段】1か所に設けられて上空に音響ビームを放射し散乱波を受信する送受波器と、送受波器の設置場所とは異なる2か所以上に設けられ散乱波を受信する受波器とを有するバイスタティック方式のドップラーソーダーシステムにおいて、送受波器及び各受波器として、いずれも複数の音響素子が配列されたフェーズドアレイ型のものを使用する。フェーズドアレイ型の送受波器及び受波器において音響ビームの放射方向を制御し、散乱波を受信する際に受信すべき散乱波の入来方法を制御することによって、散乱波でのドップラーシフト成分に基づき、上空の任意の測定位置での風向・風速値を算出する。
(もっと読む)
車両方向特定装置、車両方向特定方法、及びそのプログラム
【課題】風切り音などの雑音によって車両音が埋れてしまう状況下でも、車両の存在する方向を特定する。
【解決手段】各々が、接続された検知用マイク101、102で取得された他車両音と雑音との混合音と、検知用マイク101、102の各々で取得される風雑音よりも低い音圧の風雑音が取得される位置に設置された参照用マイク103で取得された他車両音のフィルタ通過後の音信号との差が最小になるようにフィルタを生成しながら、参照用マイク103で取得された他車両音のフィルタ通過後の音信号を算出することにより、検知用マイク101、102で取得された他車両音が強調された音を抽出する複数の他車両音強調フィルタ部104、105と、複数の他車両音強調フィルタ部104、105で抽出された音の到達時間差又は音圧差から、自車両の進行方向に対する他車両が存在する方向を特定する他車両方向特定部108とを備える。
(もっと読む)
室内位置情報管理システム及び室内位置管理方法
【課題】
室内における位置計測対象の位置情報を管理することができ、室内に物理的な制約を設けずとも、室内を滞在可能な区域と不可能な区域とに分割することができ、かつ位置計測対象毎に侵入可否区域を設定することができる室内位置情報管理システム及び室内位置情報管理方法を提供することを目的とする。
【解決方法】
送信装置の位置情報と、位置計測対象毎に固有に設定された少なくとも3種類の区域を設定する許可区域情報とに基づいて、前記位置計測対象が該許可区域情報で許可されない区域に存在する場合には警告を通知し、前記少なくとも3種類の区域が、侵入禁止区域、通過可能区域及び滞在可能区域を含むことを特徴とする室内位置情報管理システム及び室内位置情報管理方法が提供される。
(もっと読む)
自律移動支援システムとその制御方法
【課題】移動端末あるいは基準局から発信する無線信号を、複数の中継手段によって中継しあるいは再発信し、位置特定手段によって受信することで、前記移動端末の位置を高精度で特定できる自律移動支援システムを提供する。
【解決手段】位置特定手段において移動端末の位置を特定し、あるいは位置特定手段において自局の位置を特定するシステムにおいて、無線信号が同一周波数であり、時分割でかつバースト信号として間欠発信するための、移動端末あるいは基準局と、前記移動端末あるいは基準局から発信される無線信号を中継しあるいは再発信するための中継手段と、位置を特定するための位置特定手段とから構成される。
(もっと読む)
水中接近警報装置
【課題】作業基地からの距離の如何に関わらず、測定対象物の位置を正確に把握し、必要に応じて警報を発する。
【解決手段】全ての送受波局TR1〜TR5が送信局又は受信局として機能することが可能であり、演算器22によって送信局に割振られた送受波局(例えばTR5)からの送信波を、演算器22によって受信局に割振られた送受波局(例えばTR1〜TR4)において受信し、演算器に対し有線でその距離を伝達することにより、送信局の位置を割り出す。又、少なくとも1つの移動局(TR4又はTR5)から送信された送信波(SW1又はSW2)が、基準局(TR1〜TR3)で受信不可能な場合には、補完的に、各移動局間の送信波の送受信を行うことで、移動局(TR4、TR5)間の距離を直接的に把握する。
(もっと読む)
超音波による波浪計測方法および波浪計測システム
【課題】波浪が高い場合でも、精度良く計測し得る超音波を用いた波浪計測方法を提供する。
【解決手段】海面に係留されたブイ1の海面下に設けられた超音波送受信機2から海中に超音波を発信すると共に、ブイの下方の海面下に配置された3つのトランスポンダ3からの超音波を時刻信号と一緒に受信し、トランスポンダから発信した超音波を受信するまでの片道伝播時間に基づき各トランスポンダと超音波送受信機との間の距離を検出し、この距離データにハイパスフィルタ処理を施して短周期変動成分を抽出し、超音波送受信機のトランスポンダに対する方位角及び俯角を係数とする超音波送受信機の三次元座標軸の変位を未知数とする式が上記抽出された短周期変動成分に等しくなるようにした三元一次方程式を各音波中継器毎に作成すると共に、この三元一次連立方程式を解いて少なくとも短周期変動成分の高さ方向の変位を求めて波浪高さを得る方法である。
(もっと読む)
位置検出装置、位置検出方法およびプログラム
【課題】被検出部周辺の環境を考慮した被検出部の音速の算出を行い、位置の検出対象とする部分付近の音速をできるだけ正確に測定し、それを用いての位置の検出精度を高める。
【解決手段】ロボットハンド101の先端部分104に超音波送信装置を配置し、さらに先端部分104を含むことが可能な多面体131〜133を設定し、それらの頂点に超音波送受信装置111〜126を配置する。先端部分104の位置検出にあたり、先端部分104に近い頂点を特定点として選択し、この特定点に向かう他の頂点からの経路の音速を算出する。この音速に基づいて、先端部分104から特定点への経路における音速を算出し、この音速の値と、先端部分104と特定点との間における超音波の伝播時間とに基づいて、先端部分104の特定点からの距離を算出する。この距離を複数の特定点について得ることで、先端部分104の位置を特定する。
(もっと読む)
障害物検知装置
【課題】隣り合う2つの超音波ソナーの双方で障害物検知が行えるエリアを広げ、広範囲で障害物の位置特定が行えるようにする。
【解決手段】超音波ソナー2a、2bのいずれか一方を送受信モードにすると共に他方を受信モードとし、かつ、受信モードに設定する方に関しては受信感度を高めるようにする。これにより、隣り合う2つの超音波ソナー2a、2bの双方で障害物検知が行えるエリアD2を広げることが可能となり、広範囲で障害物の位置特定を行うことが可能となる。
(もっと読む)
障害物検知システム及びこのシステムの障害物センサ診断方法
【課題】障害物検知システムに用いられる障害物センサの異常を容易に検出できるようにする。
【解決手段】各障害物センサのそれぞれについて、送信部21から送信され、受信部22に直接廻り込む超音波信号23の検出有無を判断し、検出有の障害物センサを正常センサとして認識し、検出無しの障害物センサを異常センサとして認識する。
(もっと読む)
発話向き推定装置、方法及びプログラム
【課題】多数のマイクロホンを発話者を囲い込むように配置する必要が無く、かつ残響時間が長い環境下においても適切に発話向きを推定することが可能な、発話向き推定装置を提供する。
【解決手段】複数のマイクロホンから構成されたマイクロホンアレイの周囲で発話者が発話した音声信号を当該複数のマイクロホンで収音し、各マイクロホンで収音した音声信号間の相関を表す相関行列を生成して、この相関行列を固有値行列と固有ベクトル行列とに分解することにより得られた固有ベクトルから、発話者が上記マイクロホンアレイに対しどのような向きで発話したかを推定する。
(もっと読む)
音源の推定方法とその装置
【課題】突発的な音や間欠的な音が発生した場合でも、音源の推定を確実に行うことのできる方法とその装置を提供する。
【解決手段】複数のマイクロフォンとカメラとを一体化した音・映像採取ユニットを用いて音と映像とを同時に採取した後、音圧波形データと画像データとをバッファに一時保存しておき、時刻t0にて、制御ユニットから測定開始信号の指令が発せられたときには、時刻t0から所定の遡行時間長Tz分だけ遡った時刻t1=t0−Tzと時刻t2=t0+(Tw−Tz)との間にバッファに保存されたデータを取出して音ファイルと動画ファイルとを作成してメモリーに保存し、この保存された音ファイルの音圧波形データを用いて、複数のマイクロフォンで採取した音の音圧信号間の位相差を算出して音源方向を推定するようにした。
(もっと読む)
パラメタ推定装置、音源分離装置、方向推定装置、それらの方法、プログラム
【課題】空間的エイリアジングの問題が生じても、適切な音源分離を行うための確率分布のパラメタを推定する。
【解決手段】複数の音源それぞれからの音源信号が混合され、2個の収音手段で収音された観測信号を周波数領域に変換することで周波数観測信号を生成し(30、S102)、前記周波数観測信号の前記収音手段間の位相差を計算し(34、S104)、前記位相差の分布に当てはまり、周波数依存性のある確率分布モデルのパラメタを推定する(200、S106)。
(もっと読む)
1 - 20 / 125
[ Back to top ]