
Fターム[5J083DC01]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | マッピング、イメージング (169) | マッピング (64)
Fターム[5J083DC01]の下位に属するFターム
開口合成を用いるもの (32)
Fターム[5J083DC01]に分類される特許
1 - 20 / 32
車両位置検出装置
【課題】本発明は、簡単な構成で精度良く車両の位置を検出する車両位置検出装置の提供を目的とする。
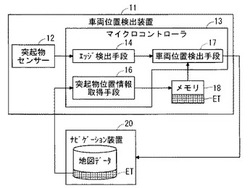
【解決手段】本発明の車両位置検出装置は、GPS電波による自車位置の測定を補助するための車両位置検出装置であって、車両に設置され、当該車両の上方における地物を感知する突起物センサー12と、道路上方の地物についての予めの調査結果に基づく情報を位置情報と紐付けた突起物位置情報を取得する突起物位置情報取得手段16と、突起物センサー12の感知結果と突起物位置情報との比較に基づき、車両の位置を検出する車両位置検出手段17と、を備える。
(もっと読む)
車両用物体認識装置

【課題】指向性の低い超音波センサを用いても、複雑な形状を有する物体の形状認識の精度を高めることができる車両用物体形状認識装置を提供する。
【解決手段】車両用物体形状認識装置1の物体形状推定部8により、物体の位置を示す距離点を超音波センサ2,3による検出距離で、照射範囲を横断した扇状の水平面の自車両の前方側臨界線近辺の対象線上の検出点および後方側臨界線近辺の対象線上の検出点のうち少なくともいずれかに設定し、自車両の移動に伴い繰り返し検出される検出距離のうち、超音波センサ2,3による自車両からの距離を検出する時刻およびその所定時間だけ前後の時刻における検出距離に基づき、各時刻の検出距離が自車両に近づくときは距離点を前方側の検出点に設定し、遠ざかるときは後方側の検出点に設定し、設定された距離点を繋ぎ合わせた形状を物体の形状と認識する。
(もっと読む)
未発見の海底熱水鉱床の探査方法及び未発見の海底熱水鉱床の探査システム
【課題】海底に存在する海底熱水鉱床の位置を効率よく特定する。
【解決手段】海底の複数箇所間での音の送受信の情報に基づいて海水密度の変化を観測する音響トモグラフィ装置10を用い、音響トモグラフィ装置10で海水密度の変化が生じている領域を特定し、当該領域に熱水プルーム42が存在していると推定し、無索潜水機(AUV)30を当該領域に移動させ、無索潜水機30に海水の状態を測定させ、その測定結果に基づいて海底熱水鉱床40から流出する熱水プルーム42を検出し、該熱水プルーム42を検出した領域を海底熱水鉱床40の存在位置とする。このような方法によれば、海底熱水鉱床を効率的に探査することができるので、例えば、海底熱水鉱床の金属資源を利用する際の採算コストを低減することが可能となる。
(もっと読む)
パーティクルフィルタリングによる移動ロボットからの2次元音源地図作成方法
【課題】移動ロボット本体だけで断続的に取得したセンサデータをもとに方位単独SLAMを行うことができる2次元音源地図作成方法を提供する。
【解決手段】移動ロボットに搭載された遅延和ビームフォーミング法により最適化されたマイクアレイにより音源からの音声データを断続的に取得し、取得した音声データに対し、周波数帯域選択法を利用したパーティクルフィルタリングにより、方位単独SLAM(Bearing only Simultaneous Localization and Mapping)を行い、2次元音源地図を作成することを特徴とする。
(もっと読む)
弾性非線形フィルタリングを介した同時的な位置特定およびマッピング用の方法
本発明による方法は、海底の所与のゾーン上を移動する水中機によって、海底に存在する起伏要素および物体の位置を推定する基礎となる観測を実行することに存する。これらの観測は、架空物体に関連付けられ、架空の弾性リンクによって一緒に連結されて架空の弾性ネットワークを構成する。ネットワークは、ネットワークを構成する架空物体の一方または他方に作用が及ぼされない限り、平衡状態にある。次に、物体は、固定位置、すなわち、対応する観測に割り当てられた位置を占める。他方において、同一の物体に対応すると仮定された2つの観測が、単一の観測に融合された場合に、2つの対応する架空物体は、近づけられる。このように近づけられることによって、架空の弾性ネットワークにおける応力の出現が誘発される。架空の弾性リンクによって伝達されるこれらの応力は、ネットワークにおける架空物体の位置の修正によって解消され、修正された位置が、対応する観測に割り当てられる。このように、2つの融合された観測の対象を形成した物体の推定位置が補正された場合に、架空の弾性ネットワークにおいて表された観測を生じさせた物体それぞれの推定位置の測定は、この補正から有利に利益を得る。 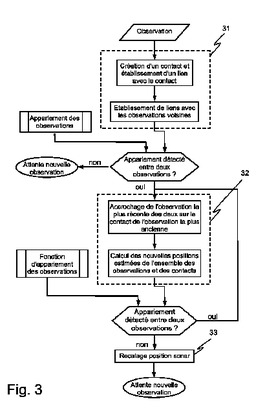 (もっと読む)
(もっと読む)
駐車空間検出装置
【課題】水平広角度ソナーを用いても駐車空間の検出精度を高めることができる駐車空間検出装置を提供する。
【解決手段】駐車空間検出装置は、12番の反射波形4wに対応する角検出位置S1を駐車空間Sの走行側の左角の検出位置に設定し、37番の反射波形4wに対応する角検出位置S2を駐車空間Sの走行側の右角の検出位置に設定する。そして、駐車空間検出装置は、双方の角検出位置S1、S2に基づいて駐車空間Sの位置を想定する。
(もっと読む)
水底地形測量方法およびシステム
【課題】水深が深い場合であっても水底地形を精度よく測量できる水底地形測量方法およびシステムを提供する。
【解決手段】GPSアンテナ2とウインチ5を設置した作業船14に、ウインチ5で繰出しおよび巻き取られるケーブル6を介して、ナローマルチビーム測探ソナー8、3軸加速度計測器9および水深計10を設置した曳航体7を接続し、超音波水中位置測量装置11の送波器11aを曳航体7に、受波器11bを作業船14に取付け、作業船14の移動速度とウインチ5の駆動の少なくとも一方を制御して曳航される曳航体7の深さ位置を調整して水中移動させつつ、ナローマルチビーム測探ソナー8、3軸加速度計測器9、水深計10の検知データ、GPSアンテナ2から送信される作業船14の位置データ、受波器11bが受信した曳航体7の位置データを制御装置4に入力する。
(もっと読む)
水中情報収集システム
【課題】水中航走体の移動領域の制約を低減すること。
【解決手段】水中航走体1は、自己の有する動力で水中を移動可能であり、水中情報を収集するサイドスキャンソーナ10C等と、サイドスキャンソーナ10C等が集めた水中の情報を送信可能な水中側第1音響モデム12Hとを有している。水上移動体2は、水中側第1音響モデム12Hと通信可能であり、水中側第1音響モデム12Hから送信された水中情報を受信する水面側第1音響モデム22Hと、水中航走体1の位置を検出する水中位置計測装置21とを有する。そして、水上移動体2は、水中航走体1の位置を検出しながら、水中航走体1の移動に合わせて水面Hを移動する。
(もっと読む)
水中航走体及び水中航走体の編隊航行方法
【課題】水深データベースが用意されていない領域についても航行効率を低下させずに、航跡検出精度を向上させること。
【解決手段】水深データベースが用意されていない領域においては、慣性航法装置及び対地速度計の計測値に基づいて現在位置を特定し、この現在位置を用いて航跡を生成し、水深データベースを有しない領域から水深データベースを有する領域に進入した場合に、水深データベースに基づいて検出された現在位置に基づいて、慣性航法装置及び対地速度計の計測値に基づいて現在位置を補正する。
(もっと読む)
音波撮像装置
【課題】海中での音波撮像装置において、海底堆積層が存在することによって生じる音波画像の位置のズレ・低いコントラスト(ぼやけ)・輪郭の歪み解消し、高精細・高解像度の音波画像を得る。
【解決手段】ソーナー送受信部300で受信した信号から底質計算部302で海底堆積層の物理パラメータを推定し、推定された物理パラメータから画像補償計算部304で堆積層の補正用データを生成する。補償画像処理部306は、この補正用データとソーナー受信信号307を用いて、堆積層の音波伝搬に起因する受信信号もしくは音波画像のズレや歪みが補正されたソーナー画像を生成する。さらに、対照情報生成部において、補正された音波画像と基準画像310を比較し、その残渣分をさらなる補正にフィードバックして補正の高精度化を行う。
(もっと読む)
音源分離装置および音源分離方法
【課題】流体音と振動音とに分離することにより振動・騒音対策の効果的かつ迅速な実施や、静音化製品の開発期間の短縮を可能とすること。
【解決手段】音源分離装置100は、流体の圧力変動に起因して発生する流体音と固体の振動に起因して発生する振動音が混在した音圧を検出する音圧検出手段と、固体の振動を検出する振動検出手段2と、音圧検出手段で得られた音圧と振動検出手段2で得られた振動とを用いて、前記音圧検出手段で検出された音圧を流体音成分と振動音成分とに分離して出力する音源分離手段3とを備える。
(もっと読む)
超音波探知装置および超音波探知方法
【課題】サイドローブによる偽像が表示されない超音波探知装置および超音波探知方法を提供する。
【解決手段】受信ビーム形成部9L、9Rは、振動子2L、2Rなどの受信信号から左受信ビーム信号、右受信ビーム信号を形成する。両受信ビームでスプリットビームが構成される。位相差算出部11はスプリットビームの位相差を算出する。メインローブ信号抽出部12は、1走査分の各走査角度での位相差データから位相差のゼロクロス点を探し、ゼロクロス点の前後で位相が±180度変化するときの走査角度幅を算出する。さらに、この走査角度幅とゼロクロス点における既知のメインローブ角度幅との比率に基づいて、受信信号がメインローブまたはサイドローブのいずれで受信されたかを判定し、サイドローブで受信されたと判定した場合、当該受信信号に係る画像を表示しないようにする。
(もっと読む)
音響歪変並び音響脱焦点による立体画像処理
【課題】
広い領域からの情報を使用して、知られた物質内に含まれる散乱物体の音響画像処理情報を迅速に収集させる。
【解決手段】
本発明は平面画像からの情報を利用して散乱構造物の立体音響画像処理を行うシステムに関する。このシステムは特徴的センサアレイ300を使用してセンサアレイ300から対象物体内に信号を放出し、対象物体の平面表示を発生させる。この平面表示は複数のxとyの座標対と少なくとも1つの候補散乱構造物106とを含む。候補散乱構造物106形状は少なくとも1対のxとyの座標に限定される。続いてこの候補散乱構造物106のxとyの座標対は第1座標依存応答関数と比較され、散乱構造物のx、yおよびzの位置を立体空間に振り分ける。
(もっと読む)
海底資源探査システム及び海底資源探査方法
【課題】信頼性が高く、安価に海底資源を探査することができる海底資源探査システムを提供する。
【解決手段】海底資源探査システムは、海中へ音波を送信し、音波が海水中に存在する、海水と密度の異なる物体の境界面で反射した散乱波を受信する振動子1と、送信した音波及び受信した散乱波から散乱強度を計算し、所定の散乱強度である場合、物体の直下の海底に資源があると判断する解析部17とを備える。
(もっと読む)
センサユニットとプログラムおよびその記録媒体
【課題】3つ以上のセンサ入力の場合でも使用することができ、また、設計者の手間を省き、マイコン搭載のメモリ容量も小さくすることができるセンサユニットを提供する。
【解決手段】センサ1〜3と、センサ値をマップ計算結果として出力する自己組織化マップ計算手段4と、状態図とセンサのパラメータ値の組を記憶している状態図記憶手段7と、状態図を入力として位置情報として出力する状態図位置計算手段5と、センサのパラメータ値から現在のセンサのパラメータ値を決定する状態図制御手段6とを有する。これによって、3つ以上のセンサがある場合でも2次元の状態図に射影し、制御を行うので、3つ以上の入力でも使用することができる。また、2次元の状態図を使用するので、信頼性の高いものを提供することができる。さらに、記憶すべきデータ量はセンサの数にほとんど関係なく一定であり、マイコンに搭載するメモリ容量も小さくすることができる。
(もっと読む)
水底三次元画像作成システムおよび水底三次元画像作成方法
【課題】 緯度、経度の位置と水深の深度を同時に正確に測量する水底測量を行い、また、水底の地物をきめ細かく立体的に表現できる水底三次元画像を作成すること。
【解決手段】GPS電波受信装置8を有する位置検出装置2にて位置情報データを獲得し、水深検出装置3にて水面下の深度情報データを獲得し、位置情報データと深度情報データから位置深度データを作成すること、及び、該位置深度データに基づき、位置情報データを平面上にプロットしてポイントを表示し、該ポイントを結ぶ三角形を形成し、前記ポイントの有する深度情報データに基づいて該三角形内に創出ポイントを形成し、該ポイントと該創出ポイントの少なくとも何れか一方を頂点とする新規三角形を前記三角形に代えて形成し、該新規三角形に着色して水底三次元画像作を作成することとした。
(もっと読む)
ガスハイドレート位置探知用方法及び装置
【課題】ガスハイドレート堆積物を位置探査する改良した技術を提供する。
【解決手段】ガスハイドレートが垂直又はほぼ垂直な岩脈内に蓄積する場合があるという可能性を考慮する電磁探査又は地震探査のいずれかを使用してガスハイドレート堆積物を検知・特性付ける調査パラダイムを提供。ガスハイドレート安定ゾーンの存在、ガスハイドレート安定ゾーンの下側にガスの豊富な供給源が存在する(又は存在した)ことの表示、及びガスの高いフラックスをガスハイドレート安定ゾーン内へ輸送することの可能性表示等の地質学的要因を調査ストラテジーの一部として考慮することが可能である。ウォークアウェイ垂直地震プロファイル技術等の地震技術、又は垂直又はほぼ垂直な岩脈の存在を検知すべく適合された電磁探査を使用してデータを収集することが可能である。1つの例においては、データ処理及び採取技術をハイドレート岩脈を検知すべく適合することが可能である。
(もっと読む)
水中航走体、及び水中航走体の測位方法
【課題】位置の誤差が蓄積されない水中航走体の測位技術を提供する。
【解決手段】本発明による水中航走体は、マルチビーム測深器1と、海底面の各位置の水深を示す水深データが予め格納された水深データベース16を備える測位演算装置5とを具備する。マルチビーム測深器1は、海底面の当該水中航走体10からの深度を、当該水中航走体10の進行方向と垂直な垂直方向に分散して規定された複数の位置について計測する。測位演算装置5は、マルチビーム測深器1によって計測された深度から海底地形に対応する計測海底地形データを生成し、計測海底地形データと水深データベース16に格納された水深データとから、マッチング処理によって当該水中航走体10の位置を特定する。
(もっと読む)
多重ビーム測深機
本発明による測深機は、それらの個別の軸がプラットフォームの運動方向の前方に向かって照準位置がずれている2つの送信−受信アンテナ(1、10)を備え、これらの軸はそれらの交点を通る直線(3)に対して対称で、プラットフォームの進行方向の軸に平行であり、第2のアンテナの受信周波数に等しい第1のアンテナの送信周波数は、第2のアンテナの送信周波数と異なり、後者の周波数は第1のアンテナの受信周波数に等しい。 (もっと読む)
堆砂測量調査を含む、環境修復のプロセスおよびシステムのための地形学
本発明は、1以上の堆砂測量調査技術を使用して三次元で流路の堆砂を地図に描く。堆砂測量調査技術は、汚染物質を含有する可能性がある堆砂帯(面積または体積のいずれであっても)を同定するために使用してもよい堆砂の定義を生み出す。これは、堆砂の実体、流路における堆砂の位置、堆砂の深さおよび/または堆砂層の厚さに基づいていてもよい。一態様では、堆砂測量調査技術、および得られた堆砂の定義を、地形学技術と組み合わせて使用し、堆砂帯の補正された汚染物質濃度を算出してもよい。現場の補正された汚染物質濃度に基づき、選択的な堆砂除去を使用して、最少の堆砂除去または堆砂試験により、最も効果的な汚染物質除去が達成されてもよい。  (もっと読む)
(もっと読む)
1 - 20 / 32
[ Back to top ]