
Fターム[5J084AA09]の内容
光レーダ方式及びその細部 (24,468) | 測定内容 (2,871) | 移動方向 (41)
Fターム[5J084AA09]に分類される特許
1 - 20 / 41
レーザースキャンセンサ

【課題】警戒エリア設定後に自動車などが進入して駐車されたり新たに無害な障害物が設置されたりした場合であっても、本来検知すべき侵入者を的確に検知可能なレーザースキャンセンサを提供する。
【解決手段】レーザー距離計110と、スキャン機構120と、距離データ取得部130と、設置状態情報と測定方向毎の検知エリア情報とを記憶するメモリ160と、取得された距離データから、前記検知エリア情報との比較によって判明する侵入または移動した物体のうちで人体に対応する可能性がある部分を抽出するとともに、そうして抽出された各抽出部分の時系列での移動状況に基づき、所定時間内の移動距離が所定距離内である前記抽出部分を除外した上で、残りの前記各抽出部分が人体であるか否かをそれぞれ判定する人体判定部140と、前記検知エリア情報を所定条件下で更新する検知エリア情報更新部140と、警告出力制御部150とを備える。
(もっと読む)
計測システムおよび計測方法

【課題】距離計測センサを用いて、観測領域内の移動対象を追跡しつつ、精度よく、対象を識別して分類することが可能な計測装置を提供する。
【解決手段】計測装置100は、対象までの水平方向の距離を計測可能に配置された複数のレーザレンジファインダ10.1〜10.4と、計測結果から、対象の位置および移動速度を推定する追跡モジュール5610と、計測結果に基づいて、対象の形状を表現する特徴ベクトルを算出する特徴抽出演算部5622と、特徴ベクトルに基づいて、対象が予め定められた分類の各クラスに属する確率を事前確率として算出する事前確率計算部5624と、対象が他の対象と同期して移動している同期状態であるかを判別し、算出された事前確率と、同期状態にある対象が各クラスに対応する尤度とに基づいて、対象が属するクラスを判別するラベル割当処理部5628とを含む。
(もっと読む)
対象物との相対位置計測方法と装置
【課題】向きの変更と移動の少なくとも一方を行う動作体から、対象物との相対位置を高精度に計測できる手段を提供する。
【解決手段】動作体3に設置したレーザ距離センサにより、各被計測点の位置を動作体座標系で表わされた座標値を取得する。動作体3に設置した撮像装置により、対象物5が含まれる領域を撮像して画像を生成する。画像において、対象物5に取り付けられた指標の位置を特定し、この位置に基づいて、撮像時において対象物5の方向を特定する。距離計測時の動作体3の向きと位置に対する撮像時の動作体3の相対的な向きθと位置Δx,Δyに従って、各被計測点の座標値を、距離計測時の動作体座標系の座標値から撮像時の動作体座標系の座標値に変換する。画像内の指標の位置に対応する、変換後の座標値を特定し、この座標値に基づいて、撮像時における動作体3から対象物5までの距離を求める。
(もっと読む)
位置・姿勢推定可能な移動体システム及び自律移動ロボットシステム
【課題】照射するレーザ光の反射光によって周囲の幾何的特徴を識別し、自装置の現在位置・姿勢を推定する際、幾何的特徴に乏しい環境においても確実に位置・姿勢を推定することが可能な移動体システムを提供する。
【解決手段】光学作用部材35を移動経路の棚や壁面等の障害物32に任意な位置と間隔にて取り付け固定する。これにより、移動体10から照射されるレーザ光は、障害物32から距離センサ部12に向けて反射するが、光学作用部材35からは反射光が到達しないため、反射光によって得られる幾何形状データ34に新たな幾何的特徴を生成することができ、移動体10は容易に自装置の現在位置及び姿勢を推定することができる。
(もっと読む)
センサー装置、安全装置、ドア、および移動監視方法
【課題】監視範囲内に位置する物体と、ガイドで案内される移動可能な移動要素との好ましくない衝突に関し、移動要素を監視するセンサー装置を提供する。
【解決手段】物体4を感知する少なくとも2つのセンサー5を有し、これらセンサーが、電磁波6を放射する送信器と、電磁波6を受信する受信器とを備え、これらセンサーが、当該センサーをガイド3aと平行に取り付け可能に、互いに隣接して配置され、これらセンサーが、また、当該センサーから放射された電磁波6が監視範囲を貫通するように配向されている、センサー装置1とする。また、障害物4の認識を向上できるように、これらセンサーには、物体4からの距離を測定する距離センサーを用いる。さらに、安全装置、ドア2、および、移動を監視する方法も提案する。
(もっと読む)
計測装置,計測方法および計測プログラム
【課題】 レーザレンジファインダで複数の対象を計測して多様な情報を得る。
【解決手段】 計測装置(10)は、スキャン面(Scn)が水平面に対して傾斜したLRF(14)で複数の対象(T1,T2,…)を計測する。計測装置のコンピュータ(12)は、ステップS1で複数の対象に関する3次元形状モデル(M1,M2)をデータベース(50)に登録し、その後、ステップS3でLRF14を制御してスキャン面の水平面に対する傾斜角(α)を変化させつつ、ステップS5〜S19(およびS21〜S39)で複数の対象それぞれのパーティクルフィルタ(38a,38b,…)を用いてLRF14からの計測データと3次元形状モデルとの比較を行うことにより複数の対象それぞれの3次元形状および姿勢、特に人の体の方向および頭の方向を少なくとも推定する。
(もっと読む)
車両用物体検出装置
【課題】電磁波を用いて物体を検知する場合、反射強度の弱い、自車の進行方向に対して横長の壁などの物体が自車の進行方向に対して横方向から移動したと誤検知することを防止するようにした車両用物体検出装置を提供する。
【解決手段】自車の進行方向に電磁波を送信し、進行方向に存在する物体に反射させて得た反射点に基づいて物体を経時的に検知する車両用物体検出装置において、反射点を2次元平面に投影して得た点群を検出し(S10)、検出された点群の重心位置を算出し(S10)、算出された重心位置が進行方向に対して横方向に移動すると共に、横方向の検知幅が変化しているか否か判定し(S14,S16,S20,S22,S28)、算出された重心位置が横方向に移動すると共に、横方向の検知幅が変化しているとき、物体は横方向に移動していないと判定する(S24)。
(もっと読む)
状態判定装置、状態判定方法およびプログラム
【課題】監視エリアの様々な状態を容易に確認可能とする。
【解決手段】不特定多数の人(移動体)が往来する環境下での、通常状態での人の移動速度VRおよび移動方向θRを予め求めておく。そして、当該環境下で、人の移動速度Vおよび移動方向θを求め、これら移動速度Vおよび移動方向θと、通常状態において予め求めた移動速度VRおよび移動方向θRとを比較し、比較結果に基づき当該環境の状態が異常状態であるか否かを判定する。
(もっと読む)
光偏向素子、レーザ装置及びセンシング装置
【課題】小型化が容易で、2方向において大きな偏向角を得ることができる光偏向素子を提供する。
【解決手段】 入射された光を、印加電圧に応じてXY面内で偏向する周期分極反転構造体、及び周期分極反転構造体を通過した光を該光の進行方向を含みXY面に直交する面内で偏向するグレーティングを有する光偏向ユニットが、XY面に直交する方向(Z軸方向)に複数積み重ねられている。そして、該複数の光偏向ユニットにおける各グレーティングの溝周期は、互いに異なっている。この場合は、小型で、2方向において大きな偏向角で光を射出することができる。
(もっと読む)
航空機搭載用大気浮遊物質検知ライダー
【課題】本発明の目的課題は、航空機が飛行中に前方の氷晶や火山灰等に代表される大気中の浮遊物質を検知する装置を提供することにある。
【解決手段】本発明の大気浮遊物質検知方法は、レーザ光を利用した航空機搭載ドップラーライダーにおいて、レーザ光を大気中に放射する送信光と遠隔領域の大気浮遊物質によって散乱された受信光との偏波面の角度差からレーザ光を反射散乱させた物質の成分を遠隔計測することを特徴とする。
(もっと読む)
レーダ信号処理装置、レーダ装置およびレーダ信号処理方法
【課題】 例えば光波レーダにおいて、物体の動きが一様ではない場合でも、観測体積内の物体の偏光解消度を精度良く計測可能にすることを目的としている。
【解決手段】 レーダ信号処理装置において、算出した非偏光解消成分のスペクトルパラメータに基づいて偏光解消成分のスペクトルパラメータを算出し、このスペクトルパラメータの1つとしての受信光強度における非偏光解消成分に対する偏光解消成分の比である偏光解消度を算出するようにしたものである。
(もっと読む)
距離センサのキャリブレーション装置、キャリブレーションプログラムおよびキャリブレーション方法
【構成】 計測装置10はコンピュータ12を含み、コンピュータ12には複数の距離センサ14が接続される。コンピュータ12は、各センサ14からの出力に基づいて、センサ14毎に人観測点を検出し、その人観測点の時間変化から人間の移動軌跡を算出する。次に、各センサ14の出力に基づいて算出された移動軌跡を、センサ14間で一致させる。一致させた移動軌跡上の2つの人観測点が所定のルールに従って抽出され、それらを用いてこの移動軌跡を生成したセンサ14間の距離および相対的な角度についてのセンサ間の制約を、移動軌跡が一致されたセンサ14の組毎に算出する。そして、センサ間の制約を用いて、全センサ14の位置および向きを推定し、推定した位置が調整される。
【効果】 初期値を与えなくても、或る環境に配置した複数の距離センサの位置および向きをキャリブレーションすることができる。
(もっと読む)
マルチライダーシステム
【課題】本発明の目的課題は、従来のライダーシステムよりも広範囲の計測を可能とし、更には乱気流の突入時に使用する機体の動揺低減用気流情報を短い周期で計測する方法並びにその機能を備えた装置を提供することにある。
【解決手段】本発明のマルチライダーシステムは、レーザ光を利用したドップラーライダー方式の光学式遠隔気流計測装置を相対位置固定の関係で二組以上装備し、各装置から同波長のレーザを放射させると共に散乱光を各装置で受信する機能を備え、不具合に対する冗長性を向上させるとともに、各々の計測信号の積分量を増加させることにより信号対雑音比を向上させるものとした。
(もっと読む)
物体認識装置
【課題】車載レーダの反射の検出パターンから迅速に対象物体の種別を推定し、また、障害物の大きさや移動の向きを把握できるようにする。
【解決手段】矩形推定部6により、レーザレーダ2に対する対象物体の移動により変化する検出パターンが対象物体の横方向の長さおよび縦方向の長さのいずれであるかを推定し、物体属性推定部7により、推定した前記幅および前記長さの少なくともいずれか一方から、1フレームの検出パターンからでも迅速に対象物体の種別を推定し、対象物体の全体の大きさや移動の向きを知ることもできるようにする。
(もっと読む)
物体検出装置および情報取得装置
【課題】コンパクトな構成にて、回折光学素子の劣化を検出可能な情報取得装置およびこれを搭載する物体検出装置を提供する。
【解決手段】情報取得装置1は、波長830nm程度のレーザ光を出射するレーザ光源111と、偏光ビームスプリッタ(PBS)113と、1/4波長板114と、DOE116と、PD117を備えている。DOE116は、レーザ光を所定のドットパターンにて目標領域に照射する。PD117は、DOE116によって回折および反射されたレーザ光の一部を受光する。
(もっと読む)
方向検知デバイスおよび電子機器
【課題】被検知対象物の2軸に関する移動方向を検知する方向検知デバイスであって、安価である方向検知デバイスを実現する。
【解決手段】方向検知デバイス100は、被検知対象物106を検知するための検知信号を出力する発光部105Dと、検知信号が被検知対象物106にて反射されて得られた反射後検知信号が入力されるとともに、そのそれぞれが、3つの異なる出力A〜Cを出力する受光部105A〜105Cと、判定信号A〜Cの論理積を求めることによって、判定信号Dを生成する論理積回路102と、判定信号A〜Dに基づいて、被検知対象物106の、X軸およびY軸の2軸に関する移動方向を検知する判定装置103と、を備える。
(もっと読む)
追跡方法、および、レーザートラッカを有する測定システム
反射器(17)が設けられた標的(9)が、レーザートラッカ(10)を含む測定システムにおいて追跡される。反射器(17)は、通常追跡モードにおいて追跡ユニット(11)により追跡され、特別追跡モードにおいて概観装置(13)により追跡される。追跡ユニット(11)の検出領域と概観装置(13)の検出領域との間にある検出領域を有する捕捉ユニット(12)も存在する。標的(9)を追跡ユニット(11)によっては検出できないが、捕捉ユニット(12)により検出可能である場合、追跡ユニット(11)の方向は、捕捉ユニット(12)による測定に従って制御される。そして、標的(9)を追跡ユニット(11)によっては検出可能である場合、通常追跡モードへの遷移が開始される。標的(9)を概観装置(13)のみにより検出可能である場合、追跡ユニット(11)の方向は、概観装置(13)の測定に従って制御される。  (もっと読む)
(もっと読む)
車両用電子安定プログラムのための、レーザダイオードをベースにした自己混合センサ
本発明は、簡単にした車両安定制御のための、レーザダイオードをベースにした自己混合レーザセンサに関する。自己混合レーザセンサから、車両のサイドスリップ角、前輪及び後輪スリップ角、ヨーレート並びに横方向加速度が、はっきりと導き出される。ヨーレート、旋回半径及びタイヤスリップ角の分析に基づく3つの基準が、アンダーステア又はオーバーステアの発生を検出するのに用いられ、これは、簡単にした車両用電子安定プログラムを可能にする。 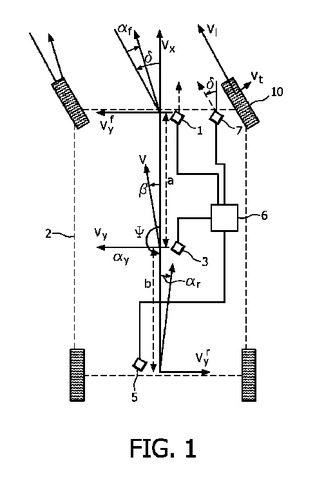 (もっと読む)
(もっと読む)
計測装置
【課題】面発光型半導体レーザによる自己結合効果を利用して測定対象物の状態変化を検出する計測装置を提供する。
【解決手段】センサ100は、光軸から第1および第2の放射角で第1および第2のレーザ光L1、L2をそれぞれ出射する1次シングルモードのVCSEL110と、VCSELを駆動する駆動回路と、VCSELから出射された第1および第2のレーザ光を測定対象物Sに照射したとき、測定対象物Sからの戻り光によって生じる自己結合効果によるインピーダンス変動を検出するインピーダンス変動検出回路120と、検出されたインピーダンスの周波数成分を分析する周波数成分分析回路130と、分析結果に基づき測定対象物Sの距離、速度および移動方向を算出する距離・速度算出回路140とを有する。
(もっと読む)
車両の障害物警報装置
【課題】 ドライバーが前方横断物に対して自車両を安全に運転するために有益な障害物情報を状況に合致した的確なかたちでドライバーに提供することを課題とする。
【解決手段】 レーザレーダ11で検出した車両前方に存在する障害物の移動方向を検出し、その検出結果に基づいて自車の進行方向の前方を横切る動きをすると判断した障害物を、ディスプレイ13に視覚的に表示する電子制御ユニット10を備える。
(もっと読む)
1 - 20 / 41
[ Back to top ]